Автор: Денис Аветисян
Исследователи разработали систему, позволяющую автономным роботам эффективно избегать столкновений, используя нейронные сети для обработки данных сенсоров и прогнозирования траектории.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Представлен метод нелинейного прогнозного управления на основе кодирования функции знакового расстояния, обеспечивающий надежную навигацию роботов в сложных условиях.
Несмотря на значительный прогресс в области автономной робототехники, надежное предотвращение столкновений в неизвестных и загроможденных средах остается сложной задачей. В данной работе, озаглавленной ‘Neural NMPC through Signed Distance Field Encoding for Collision Avoidance’, предлагается новый подход к навигации, использующий нейронные сети для кодирования данных с датчиков в виде функции знакового расстояния (SDF). Это позволяет интегрировать информацию об окружении непосредственно в нелинейный предиктивный контроллер (NMPC), обеспечивая эффективное предотвращение столкновений и отслеживание скорости. Сможет ли предложенный метод обеспечить надежную и адаптивную навигацию в сложных реальных условиях и открыть новые горизонты для автономных робототехнических систем?
Вызов динамичной среды: Основа адаптации
Традиционные системы навигации испытывают значительные трудности в сложных и непредсказуемых условиях, требующих быстрой адаптации к изменяющейся обстановке. Эти системы, как правило, полагаются на заранее созданные карты или используют методы одновременной локализации и построения карты (SLAM), которые становятся неэффективными при внезапном появлении новых препятствий или изменении окружающей среды. В динамических средах, где объекты постоянно перемещаются или появляются, статичные карты быстро устаревают, а алгоритмы SLAM могут давать сбои из-за неверной интерпретации данных. Для успешной навигации в таких условиях необходимы системы, способные в режиме реального времени воспринимать окружающую обстановку, прогнозировать поведение объектов и оперативно корректировать маршрут, что представляет собой серьезную задачу для современных робототехнических систем и автономных транспортных средств.
Использование предварительно созданных карт или методов одновременной локализации и построения карты (SLAM) сталкивается с существенными ограничениями в динамически изменяющихся условиях. Традиционные подходы предполагают относительную статичность окружения, что делает их неэффективными при появлении новых препятствий или перемещении уже существующих. Системы SLAM, хотя и способны создавать карты «на лету», испытывают трудности при быстром изменении окружения, что приводит к ошибкам в построении карты и, как следствие, к неточным оценкам положения робота. Постоянная необходимость обновления карт и пересчета траектории в реальном времени существенно увеличивает вычислительную нагрузку и может приводить к задержкам, критичным для безопасной навигации. Таким образом, разработка алгоритмов, способных адаптироваться к изменяющейся среде без полной перестройки карты, является ключевой задачей современной робототехники.
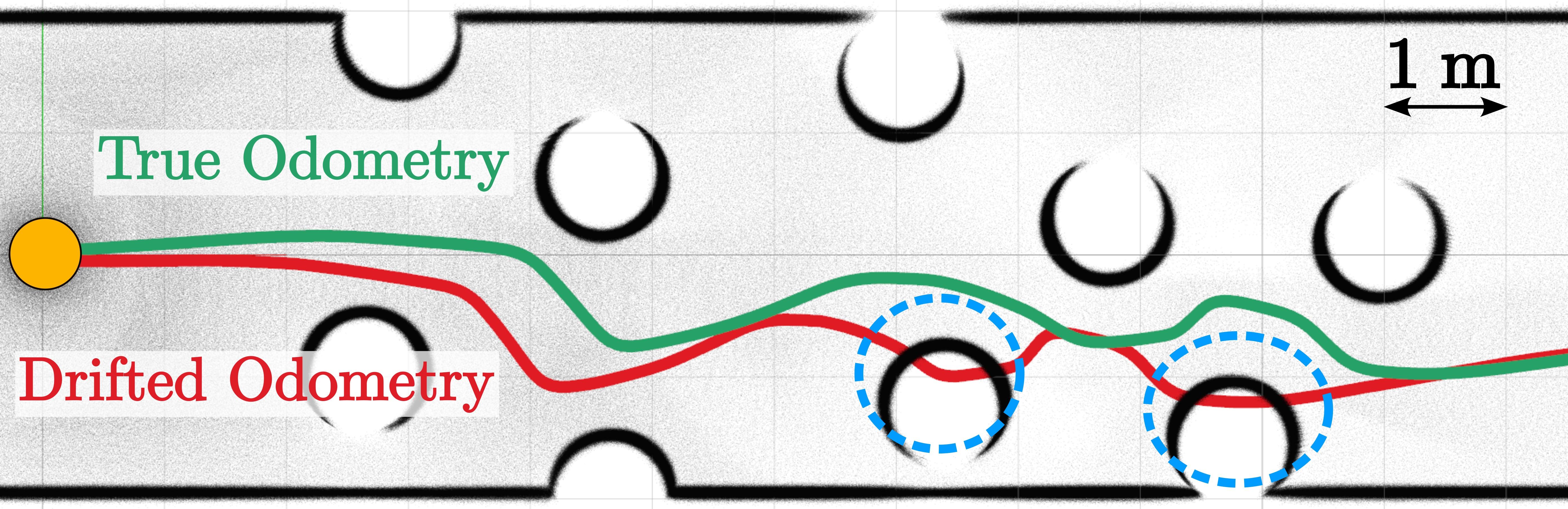
Точность определения положения является фундаментальной задачей для любой системы навигации, однако она подвержена ошибкам, таким как накопление погрешности одометрии — эффект, известный как дрифт. Данное явление представляет собой постепенное расхождение между расчетной и фактической позицией робота или автономного устройства, возникающее из-за неидеальности датчиков и алгоритмов оценки движения. Накапливаясь со временем, дрифт может привести к существенным отклонениям от намеченного маршрута, снижая надежность и эффективность навигации, особенно в продолжительных операциях или при отсутствии внешних ориентиров. Для смягчения влияния данной проблемы активно разрабатываются методы коррекции на основе данных от различных сенсоров, включая камеры, лидары и инерциальные измерительные блоки, а также алгоритмы фильтрации, такие как фильтр Калмана, направленные на повышение устойчивости и точности оценки положения в условиях неопределенности.
Эффективное предотвращение столкновений требует не просто быстрой реакции, но и способности адаптироваться к непрерывно меняющейся обстановке. Современные системы, стремясь к высокой производительности, часто используют заранее заданные алгоритмы, которые оказываются неэффективными в условиях непредсказуемых препятствий. Более продвинутые подходы фокусируются на адаптивном управлении, где робот или автономный аппарат постоянно оценивает окружающую среду и корректирует траекторию движения в режиме реального времени. Такие стратегии включают в себя прогнозирование движения препятствий, динамическое перепланирование маршрута и использование алгоритмов машинного обучения для оптимизации поведения в сложных сценариях. Ключевым аспектом является баланс между скоростью реакции и точностью оценки, что позволяет обеспечить безопасное и эффективное перемещение даже в самых динамичных условиях.
Кодирование окружения: Функции знаковых расстояний
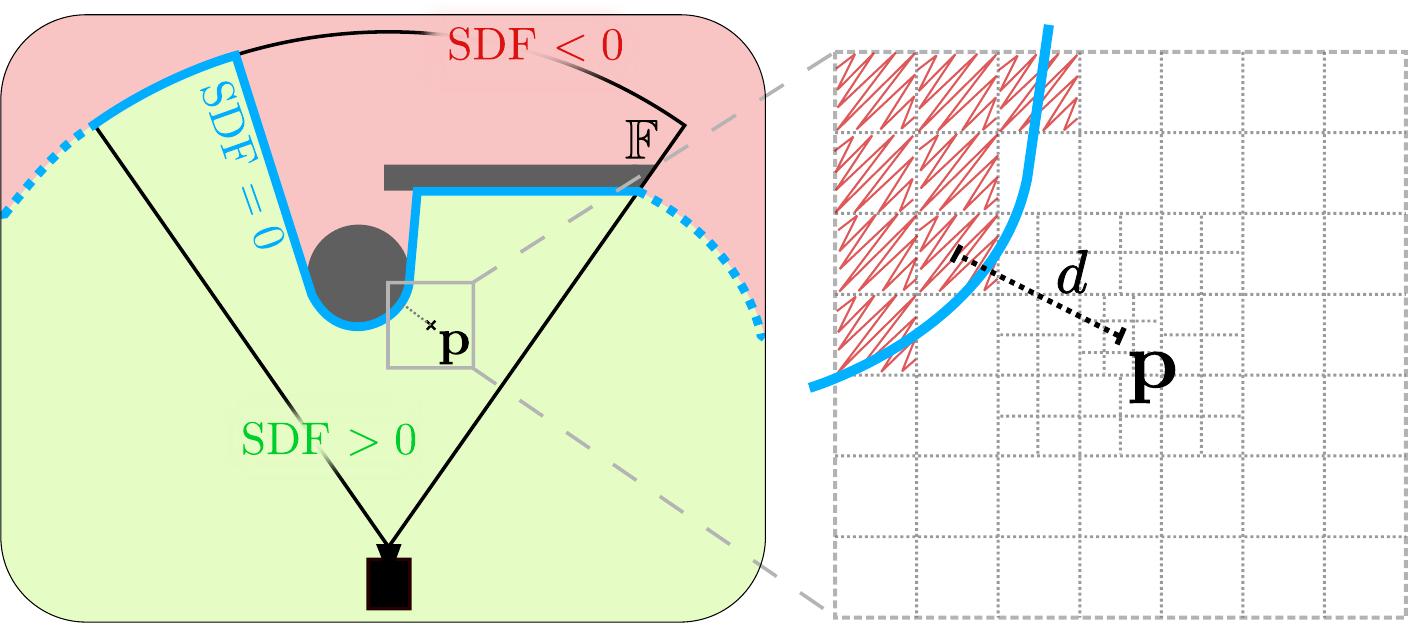
В основе нашего подхода лежит представление окружающей среды посредством функций знаковых расстояний (SDF). SDF представляют собой непрерывное и дифференцируемое описание пространства, где значение функции в каждой точке пространства указывает на кратчайшее расстояние до поверхности объекта. Знак расстояния указывает, находится ли точка внутри ($<0$), снаружи ($>0$), или на поверхности ($=0$) объекта. Такое представление позволяет эффективно выполнять операции, требующие анализа геометрии, например, обнаружение столкновений и планирование траекторий, благодаря возможности вычисления градиента функции, указывающего направление к ближайшей поверхности.
Для эффективного преобразования отдельных измерений дальности в формат signed distance function (SDF) используется архитектура нейронной сети. Входными данными для сети служат данные, полученные с датчиков дальности, представляющие собой расстояние до ближайшей поверхности в определенном направлении. Нейронная сеть обрабатывает эти данные и вычисляет значение SDF для каждой точки пространства, определяя расстояние до ближайшей поверхности с учетом знака (положительное — вне объекта, отрицательное — внутри). Такая архитектура позволяет компактно представить информацию о геометрии окружения и обеспечивает возможность дифференцируемого представления, необходимого для оптимизации и планирования.
Нейросетевое кодирование с использованием signed distance functions (SDF) обеспечивает компактное и информативное представление окружающей среды. В отличие от дискретных представлений, таких как воксели или point clouds, SDF описывает пространство непрерывной функцией, где значение в каждой точке пространства указывает на расстояние до ближайшей поверхности. Это позволяет эффективно хранить геометрию сцены, используя значительно меньше памяти, чем традиционные методы. Кроме того, непрерывный характер SDF облегчает вычисления градиентов, что критически важно для задач планирования пути и манипулирования объектами. Компактность достигается за счет параметризации SDF с помощью нейронной сети, которая обучается отображать входные данные датчиков (например, данные лидара или глубинной камеры) в функцию расстояния, описывающую геометрию сцены.
Нейронные сети используются для аппроксимации сложных пространственных взаимосвязей в окружающей среде. Вместо явного моделирования геометрии, сеть обучается предсказывать расстояние до ближайшей поверхности для любой заданной точки в пространстве. Этот процесс позволяет эффективно представлять сложные формы и топологии, используя веса нейронной сети для кодирования информации о геометрии сцены. Точность аппроксимации зависит от архитектуры сети, объема обучающих данных и используемой функции потерь, направленной на минимизацию ошибки между предсказанными и реальными расстояниями. В результате, сеть способна обобщать и реконструировать геометрию, даже для точек, не встречавшихся в обучающем наборе данных.
Прогнозное управление с нелинейным MPC
Нелинейное прогнозирующее управление (НППУ) является центральным алгоритмом планирования и управления, используемым в данной системе. НППУ представляет собой метод оптимального управления, который использует модель динамики системы для прогнозирования ее будущего поведения на определенном горизонте планирования. В рамках НППУ формируется задача оптимизации, включающая целевую функцию, отражающую желаемые характеристики движения, и ограничения, учитывающие физические возможности системы и условия окружающей среды. Решение этой задачи оптимизации определяет оптимальную последовательность управляющих воздействий, минимизирующую целевую функцию и обеспечивающую достижение поставленных целей. В отличие от линейных методов управления, НППУ способно эффективно работать с нелинейными системами и ограничениями, что критически важно для обеспечения высокой точности и надежности управления в сложных условиях.
Нелинейное прогнозирующее управление (NMPC) использует представление окружающей среды в виде Signed Distance Function (SDF) для прогнозирования будущих состояний и оптимизации траекторий. SDF определяет расстояние до ближайшей поверхности препятствия, позволяя NMPC моделировать геометрию окружения и предсказывать столкновения. На основе этого представления NMPC решает задачу оптимизации, минимизируя функцию стоимости, которая учитывает отклонение от желаемой траектории, энергозатраты и штрафы за приближение к препятствиям. Решение этой задачи оптимизации дает оптимальную последовательность управляющих воздействий, обеспечивающих безопасное и эффективное движение робота в сложной среде. Точность прогнозов напрямую зависит от точности SDF и используемой динамической модели робота.
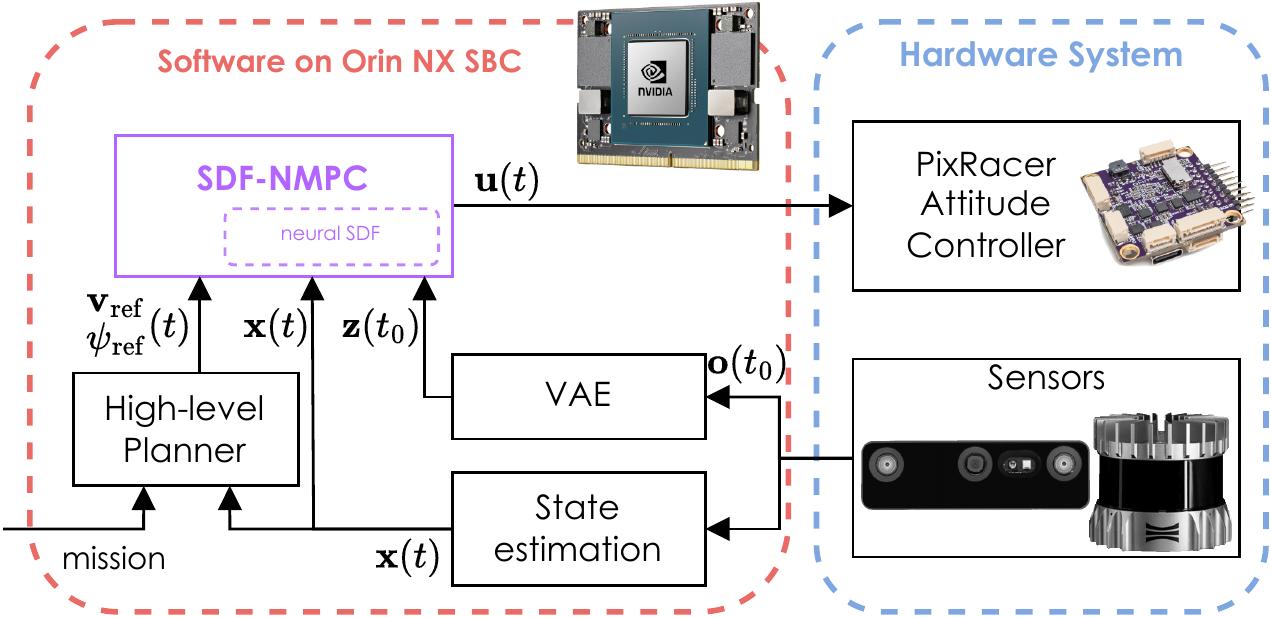
Интеграция нейросетевого кодирования SDF (Signed Distance Function) в структуру нелинейного MPC (Model Predictive Control), формирующая NeuralNMPC, позволяет значительно повысить адаптивность и производительность системы управления. Традиционный NMPC требует точной математической модели окружения, что ограничивает его применение в динамических и неизвестных средах. NeuralNMPC, используя нейронную сеть для представления SDF, получает возможность аппроксимировать геометрию окружения на основе сенсорных данных. Это обеспечивает более точное предсказание будущих состояний и, как следствие, оптимизацию траектории движения даже при изменениях в окружающей среде. Нейронная сеть, обученная на данных окружения, позволяет NeuralNMPC обобщать информацию и эффективно работать в ранее не встречавшихся ситуациях, что повышает устойчивость и надежность системы управления в сложных условиях.
Радарная инерциальная одометрия обеспечивает высокоточные оценки позы робота, необходимые для предсказательных возможностей Нелинейного Модельно-Прогнозирующего Управления (NMPC). Неизбежный дрейф позиций, характерный для инерциальных систем, компенсируется за счет непрерывной коррекции на основе данных радара, что позволяет NMPC строить достоверные прогнозы траектории и эффективно планировать управление. Высокая точность оценок позы критически важна для корректной работы NMPC, поскольку ошибки в определении текущего состояния приводят к отклонениям от запланированной траектории и снижению эффективности управления. Использование данных радара в сочетании с инерциальными измерениями позволяет достичь высокой надежности и устойчивости системы управления даже в условиях значительного дрейфа инерциальной системы.
К надежной и автономной навигации
Система, разработанная для обеспечения надежной и автономной навигации, принципиально отличается от традиционных подходов, избавляя от необходимости создания предварительных карт или использования алгоритмов одновременной локализации и построения карты (SLAM). Этот отказ от картографирования открывает значительные преимущества в гибкости и адаптивности, позволяя роботу ориентироваться и перемещаться в неизвестных или динамично меняющихся средах без предварительной информации об окружении. Отсутствие зависимости от карт особенно важно в ситуациях, когда создание или поддержание актуальных карт затруднено или невозможно, например, в быстро меняющихся промышленных условиях или при исследовании неструктурированных пространств. Подобная архитектура не только упрощает развертывание системы, но и повышает ее устойчивость к ошибкам, возникающим при построении или обновлении карт, обеспечивая более надежную и эффективную навигацию.
Адаптивные стратегии управления, заложенные в основе нелинейного прогнозирующего управления (NMPC), эффективно компенсируют влияние погрешностей одометрии и неопределенностей окружающей среды. Вместо жесткого следования заранее заданной траектории, NMPC динамически корректирует курс робота, предсказывая его будущее состояние и оптимизируя управление в реальном времени. Этот подход позволяет системе учитывать как накопленные ошибки в оценке положения, так и неожиданные изменения в окружающей среде, например, появление препятствий или скольжение по поверхности. В результате, робот способен поддерживать стабильную и точную навигацию даже в сложных и непредсказуемых условиях, значительно повышая надежность и автономность перемещения.
Система демонстрирует впечатляющую скорость работы, позволяющую оперативно реагировать на динамические препятствия. Среднее время решения задачи по планированию траектории составляет всего 15.4 миллисекунды при использовании конфигурации SDF256-64 на вычислительной платформе NVIDIA Orin NX. Такая высокая производительность достигается благодаря оптимизированным алгоритмам и эффективному использованию аппаратных ресурсов, что критически важно для обеспечения надежной и безопасной навигации робота в реальном времени, особенно в сложных и непредсказуемых условиях окружающей среды. Быстрая обработка информации позволяет своевременно корректировать траекторию движения, избегая столкновений и обеспечивая плавное и эффективное перемещение.
Исследования показали, что разработанная система демонстрирует 100%-ную успешность навигации в загроможденных средах, даже при наличии намеренных помех и погрешностей в оценке положения. Это достигается благодаря адаптивным алгоритмам управления, способным компенсировать неточности одометрии и динамически меняющиеся условия окружающей среды. Доказанная устойчивость к неблагоприятным факторам значительно повышает надежность и автономность робототехнических систем, открывая возможности для их применения в сложных и непредсказуемых условиях, где традиционные методы навигации могут оказаться неэффективными. Подобный уровень устойчивости является ключевым фактором для развертывания роботов в реальных сценариях, требующих высокой степени надежности и безопасности.

Исследование, представленное в данной работе, демонстрирует закономерную эволюцию систем управления робототехникой. Интеграция нейронных сетей и нелинейного прогнозирующего управления (NMPC) посредством кодирования signed distance field — это не просто техническое усовершенствование, а закономерный этап в развитии автономных систем. Как некогда заметил Джон фон Нейманн: «В науке нет готовых ответов, есть лишь более или менее полезные вопросы». Данный подход к кодированию сенсорных данных и обеспечению предотвращения столкновений подчеркивает, что каждая архитектура проходит свой жизненный цикл, а задача исследователей — не создать идеальную систему, а разработать адаптивную, способную к эволюции в меняющихся условиях. Улучшения в области сенсорного слияния и картографирования неизбежно устаревают, однако предложенный метод позволяет создавать более устойчивые и эффективные системы на основе текущих знаний.
Куда же дальше?
Представленная работа, безусловно, является шагом к созданию более устойчивых систем автономной навигации. Однако, подобно любому новому инструменту, она лишь подчеркивает глубину нерешенных вопросов. Кодирование сенсорных данных в виде функции знаковых расстояний — элегантное решение, но его уязвимость к неполной или ошибочной информации остается существенным ограничением. Всегда ли возможно достоверно оценить «расстояние» до неизведанного, или же мы лишь откладываем столкновение, а не предотвращаем его?
Дальнейшее развитие неизбежно связано с интеграцией данной архитектуры с более сложными моделями мира. Простое «знание» расстояния до препятствия недостаточно; необходима оценка динамики окружающей среды, прогнозирование поведения других агентов. Инфраструктура, подобно естественным циклам, неизбежно накапливает «технический долг» в виде упрощений и приближений. Вопрос лишь в том, как долго система сможет функционировать, прежде чем этот долг потребует расплаты.
В конечном итоге, успех подобных подходов будет определяться не столько точностью алгоритмов, сколько способностью системы адаптироваться к непредсказуемости реального мира. Аптайм, эта редкая фаза гармонии во времени, всегда остается лишь временным состоянием, иллюзией порядка в хаосе. Искусство создания автономных систем — это искусство управления этой иллюзией.
Оригинал статьи: https://arxiv.org/pdf/2511.21312.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок: от инфляции к инвестициям: что ждет инвесторов? (11.06.2026 02:32)
- Как сделать фотографию резкой.
- Прогнозы цен на CC: анализ криптовалюты CC
- Cubot Note 60 ОБЗОР: плавный интерфейс, большой аккумулятор
- Обзор Motorola Edge 50 Fusion
- Huawei Mate 80 Pro ОБЗОР: много памяти, большой аккумулятор, огромный накопитель
- 10 лучших OLED ноутбуков. Что купить в июне 2026.
- Xiaomi Redmi R70m ОБЗОР: большой аккумулятор, плавный интерфейс
- Обзор Nikon D5500 DX
- vivo S60 ОБЗОР: скоростная зарядка, объёмный накопитель, современный дизайн
2025-11-29 00:22