Автор: Денис Аветисян
Новый подход объединяет физические модели и глубокое обучение для создания более реалистичных и надежных тактильных датчиков.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"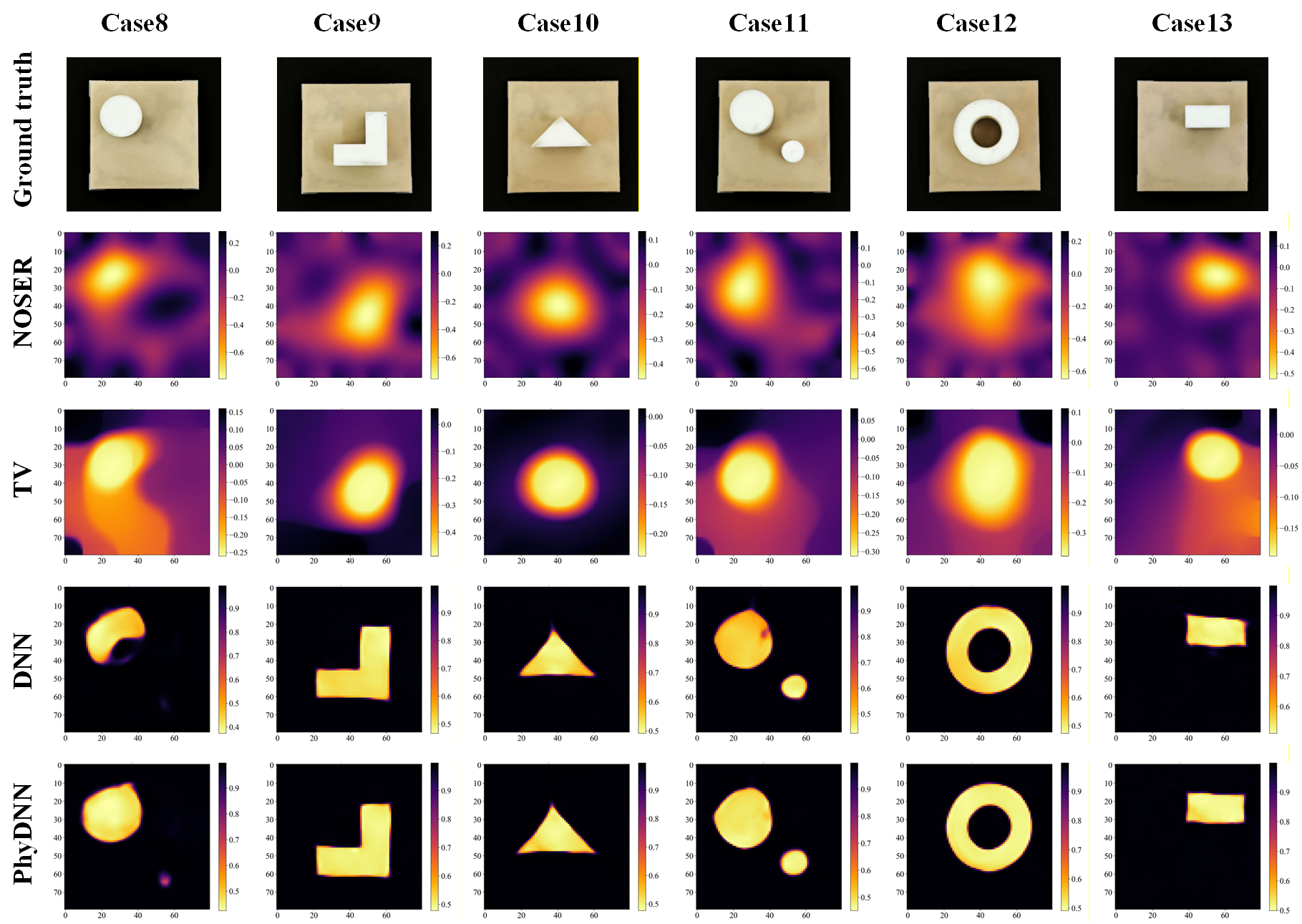
В статье представлена PhyDNN — нейросетевая платформа, использующая дифференцируемую прямую модель для повышения точности реконструкции данных электроимпедансной томографии.
Нелинейность обратной задачи в электрической импедансной томографии (ЭИТ) часто приводит к артефактам и неточностям при реконструкции тактильных ощущений. В данной работе, представленной под названием ‘Physics-Driven Learning Framework for Tomographic Tactile Sensing’, предложен фреймворк PhyDNN, объединяющий глубокое обучение с физической моделью ЭИТ для повышения точности реконструкции. Интеграция дифференцируемой прямой модели в процесс обучения позволяет PhyDNN превосходить существующие методы в реконструкции формы, местоположения и распределения давления при тактильном взаимодействии. Открывает ли такой подход новые возможности для создания более реалистичных и чувствительных тактильных сенсоров и систем обратной связи?
Электрическое зрение: вызов томографии импеданса
Восстановление распределения электропроводности внутри объекта по измерениям напряжения на его поверхности является центральной задачей в электрической импедансной томографии (ЭИТ). Представьте, что необходимо определить внутреннюю структуру объекта, полагаясь исключительно на данные, полученные с его внешней оболочки — задача, сопоставимая с попыткой определить содержимое закрытой коробки, ощупывая её снаружи. В ЭИТ электрический ток пропускается через исследуемый объект, и измеряется результирующее напряжение на его границе. Анализируя эти поверхностные данные, ученые стремятся воссоздать карту электропроводности внутри объекта, позволяющую выявить различия в тканях, обнаружить дефекты или отследить изменения во времени. Сложность заключается в том, что электрический ток распространяется по множеству путей внутри объекта, и поверхностные измерения представляют собой сложную интеграцию всех этих путей, требующую продвинутых математических алгоритмов для точной реконструкции внутреннего распределения электропроводности.
Восстановление распределения электропроводности внутри объекта по измерениям напряжения на его поверхности представляет собой сложную задачу, усугубляемую тем, что данная проблема является принципиально «неправильно поставленной». Это означает, что существует бесконечное количество различных распределений электропроводности, которые могут привести к абсолютно идентичным показаниям напряжения на границах. Иными словами, наблюдаемые данные недостаточны для однозначного определения внутренней структуры объекта. Эта неоднозначность создает значительные трудности при интерпретации результатов и требует применения сложных математических методов и алгоритмов для получения надежной и точной реконструкции, способных отфильтровать ложные решения и выделить наиболее вероятное распределение электропроводности внутри исследуемого объекта.
Традиционные методы электрической импедансной томографии (ЭИТ) часто сталкиваются с трудностями в обеспечении высокой точности и надежности, особенно при работе в сложных ситуациях, например, при исследовании объектов со сложной геометрией или неоднородной проводимостью. Эта проблема существенно ограничивает возможности применения ЭИТ в тактильном сенсоринге, где требуется детальное и достоверное восстановление распределения проводимости внутри исследуемого объекта для определения его формы, текстуры и механических свойств. Неспособность эффективно разрешать неоднозначности и компенсировать шумы в сложных сценариях приводит к искажениям в получаемых изображениях, что снижает практическую ценность ЭИТ для таких приложений, как робототехника, медицинская диагностика и контроль качества. Разработка более совершенных алгоритмов реконструкции и методов повышения устойчивости к помехам является ключевой задачей для расширения области применения ЭИТ в тактильном сенсоринге.

Физически обоснованное машинное обучение для ЭИТ: возвращаясь к основам
В основе нашего подхода лежит интеграция ‘Прямой модели’ (Forward Model) в процесс обучения. Данная модель представляет собой математическое описание физики переноса заряда в сенсорном материале, учитывающее такие параметры как проводимость, диэлектрическая проницаемость и геометрию структуры. Модель строится на решении уравнений, описывающих электромагнитные поля и транспорт носителей заряда, например, уравнения Пуассона $ \nabla \cdot \mathbf{D} = \rho $ и уравнения непрерывности для тока. Использование прямой модели позволяет численно симулировать отклик сенсора на различные внешние воздействия и генерировать синтетические данные, необходимые для обучения алгоритмов машинного обучения.
Метод обучения с учетом физической модели (Physics-Driven Supervised Learning) использует разработанную физическую модель для генерации синтетических данных, служащих в качестве обучающей выборки. Это позволяет значительно расширить объем данных для обучения, особенно в случаях, когда получение экспериментальных данных затруднено или дорогостояще. Кроме того, физическая модель применяется для ограничения пространства решений, что повышает точность реконструкции за счет исключения физически нереалистичных результатов. Такой подход позволяет обучать модели, которые лучше обобщают данные и демонстрируют повышенную устойчивость к шумам и погрешностям измерений, что особенно важно для задач реконструкции изображений в электроимпедансной томографии ($EIT$).
Реализация подхода осуществляется путем включения физических ограничений непосредственно в функцию потерь нейронной сети, что является основой концепции «Физически-обоснованных нейронных сетей» (Physics-Informed Neural Networks, PINN). В рамках PINN, функция потерь состоит из двух основных компонентов: традиционной потери, определяющей соответствие между предсказанными и целевыми значениями, и регуляризационного члена, представляющего собой остаток физического уравнения, описывающего процесс. Минимизация общей функции потерь заставляет сеть находить решения, которые не только соответствуют данным, но и удовлетворяют известным физическим законам, таким как уравнение Пуассона или уравнение переноса. Это позволяет повысить точность и обобщающую способность модели, особенно в случаях ограниченного объема обучающих данных или при экстраполяции за пределы области обучения. Математически, функция потерь может быть представлена как $L = L_{data} + \lambda L_{physics}$, где $\lambda$ — гиперпараметр, определяющий вес физической потери.

Архитектура PhyDNN: мост между физикой и глубоким обучением
В основе архитектуры PhyDNN лежит U-образная нейронная сеть (U-Net), широко известная своими возможностями в задачах сегментации и реконструкции изображений. Данная архитектура состоит из энкодера, который последовательно уменьшает пространственное разрешение входных данных, извлекая при этом признаки, и декодера, который восстанавливает пространственное разрешение, используя извлеченные признаки для создания реконструкции. U-Net отличается наличием «пропускных соединений» (skip connections), которые напрямую соединяют слои энкодера и декодера, что позволяет передавать информацию о деталях изображения и улучшает качество реконструкции, особенно при работе с ограниченными объемами данных. Такая структура позволяет PhyDNN эффективно обрабатывать данные электротомографии и создавать высококачественные реконструкции внутренних структур объекта.
Сеть прямого оператора (Forward Operator Network) является ключевым компонентом архитектуры PhyDNN и представляет собой сверточную нейронную сеть (CNN), предназначенную для эффективной аппроксимации прямой задачи электрической импедансной томографии (EIT). Для обеспечения точности вычислений, сеть использует матрицу чувствительности (Sensitivity Matrix), полученную на основе метода конечных элементов (Finite Element Method). Такой подход позволяет значительно ускорить процесс решения прямой задачи по сравнению с традиционными численными методами, сохраняя при этом приемлемую точность реконструкции. Входными данными для сети являются параметры модели и граничные условия, а выходные данные представляют собой аппроксимацию распределения потенциала или тока внутри исследуемого объекта.
В архитектуре PhyDNN реализована предварительная обработка, основанная на физических моделях (Physics-Informed Preprocessing). Этот этап предполагает использование традиционных методов электротомографии (ЭИТ) для получения начальной, грубой реконструкции исследуемой области. Полученное решение служит отправной точкой для дальнейшей обработки сетью PhyDNN, которая уточняет и повышает точность реконструкции. Такой подход позволяет снизить вычислительную нагрузку и ускорить процесс обучения, используя преимущества как физических моделей, так и возможностей глубокого обучения. Использование предварительной реконструкции, полученной классическими методами ЭИТ, обеспечивает более стабильную сходимость и повышает качество конечного результата.

Визуализация в реальном времени и перспективы применения: ощущая мир вокруг
Разработанный фреймворк PhyDNN демонстрирует возможности получения изображений в режиме реального времени, открывая новые перспективы в области динамического тактильного зондирования. Данная технология позволяет создавать системы, способные воспринимать и анализировать прикосновения с высокой скоростью и точностью, что критически важно для таких применений, как роботизированная манипуляция объектами и создание продвинутых протезов. Возможность оперативного получения тактильной информации позволяет роботам адаптироваться к изменяющимся условиям и взаимодействовать с окружением более естественно, а протезам — обеспечивать более точное и чувствительное управление, приближая их функциональность к естественным ощущениям.
В ходе сравнительного анализа с традиционными алгоритмами, такими как ‘NOSER’, использующим $Total Variation Regularization$, разработанная платформа PhyDNN продемонстрировала значительно превосходящую точность и надежность. В ходе тестирования PhyDNN последовательно достигала наивысших значений метрик $SSIM$, $CC$ и $PSNR$, что свидетельствует о более качественном восстановлении изображения, а также минимальных значений $RIE$ (Relative Image Error), подтверждающих высокую степень соответствия восстановленного изображения оригиналу. Эти результаты указывают на то, что PhyDNN предоставляет более надежный и эффективный метод для обработки и реконструкции тактильных данных, превосходя существующие подходы в плане как точности, так и устойчивости к шумам и искажениям.
В ходе исследований было установлено, что оптимальное сочетание физической регуляризации и точности данных достигается при значении $\beta = 0.0029$. Именно при данной величине взвешенная оценка, учитывающая структурное сходство (SSIM), корреляцию (CC), отношение сигнал/шум (PSNR) и ошибку реконструкции изображения (RIE), достигает максимального значения. Это свидетельствует о том, что PhyDNN находит баланс между поддержанием физически правдоподобных решений и точным воспроизведением входных данных, что критически важно для надежной и высокоточной работы тактильных сенсоров в реальном времени. Достижение этого оптимального баланса позволяет существенно повысить качество реконструируемого изображения и улучшить производительность системы в целом.
Разработка PhyDNN открывает путь к созданию принципиально нового поколения тактильных сенсоров, характеризующихся беспрецедентной чувствительностью, разрешением и скоростью отклика. В отличие от существующих технологий, позволяющих лишь приблизительно ощущать текстуру или форму объекта, эти сенсоры способны улавливать даже самые незначительные изменения давления и деформации поверхности, обеспечивая детальное и реалистичное тактильное восприятие. Подобные характеристики критически важны для широкого спектра применений, от прецизионной робототехники и сложных манипуляций до создания протезов, неотличимых по функциональности от настоящих конечностей, и разработки систем виртуальной реальности с полным погружением, где тактильные ощущения играют ключевую роль в создании иллюзии присутствия.

Исследование демонстрирует, что даже самые передовые методы глубокого обучения в области тактильного осязания, такие как PhyDNN, неизбежно сталкиваются с ограничениями реального мира. Интеграция дифференцируемой прямой модели в процесс обучения — это не панацея, а лишь попытка хоть как-то обуздать хаос данных, получаемых от датчиков электрического импеданса. Как отмечал Эдсгер Дейкстра: «Программирование — это не про создание новых вещей, а про управление сложностью». И в данном случае, управление сложностью заключается в том, чтобы хоть как-то заставить алгоритм интерпретировать неидеальные данные, полученные в результате физических измерений. В конечном итоге, как и предсказывалось, элегантная теория сталкивается с суровой реальностью производственной среды, где датчики дают сбой, а данные требуют постоянной очистки и фильтрации.
Что дальше?
Представленная работа, безусловно, добавляет ещё один уровень сложности в и без того запутанный мир тактильных сенсоров. Интеграция физической модели в процесс обучения — ход, несомненно, элегантный. Однако, не стоит обольщаться. История показывает, что каждая «революционная» архитектура неизбежно превращается в сложный клубок условных обозначений, требующий постоянной поддержки. Начинают подозревать, что они просто повторяют модные слова, когда говорят об «обобщении» и «робастности».
Очевидно, что проблема реконструкции тактильного восприятия сводится не только к улучшению алгоритмов. Всегда найдется непредсказуемый сценарий, новый материал, или просто устаревшее оборудование. Вскоре это назовут AI и получат инвестиции, а потом выяснится, что документация снова соврала о точности измерений. Реальный вызов — в создании систем, способных адаптироваться к неминуемому хаосу.
В конечном счёте, данная работа — лишь ещё один шаг на пути к созданию «умной» тактильной системы. И, как показывает опыт, сложная система «когда-то была простым bash-скриптом». Технический долг — это просто эмоциональный долг с коммитами. Поэтому, стоит опасаться не столько ограничений текущего подхода, сколько неизбежных компромиссов, которые будут сделаны в погоне за «инновациями».
Оригинал статьи: https://arxiv.org/pdf/2512.03512.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в июне 2026.
- Xiaomi Redmi R70m ОБЗОР: большой аккумулятор, плавный интерфейс
- Неважно, на что вы фотографируете!
- Российский рынок в штопоре: дефицит бюджета, геополитика и падение индекса Мосбиржи (06.06.2026 01:32)
- Oppo K14 Turbo Pro ОБЗОР: скоростная зарядка, большой аккумулятор, объёмный накопитель
- Sharp Aquos R10 ОБЗОР: плавный интерфейс, яркий экран, объёмный накопитель
- Huawei Mate 80 Pro ОБЗОР: много памяти, большой аккумулятор, огромный накопитель
- Российский рынок: консолидация, рубль и секторные тренды – анализ ключевых событий недели (04.06.2026 11:32)
- Российский рынок: Между смягчением ЦБ и геополитическими рисками. Что ждет инвесторов? (05.06.2026 01:32)
- Российский рынок: между санкциями, ПМЭФ и дивидендными перспективами (05.06.2026 11:32)
2025-12-05 01:08