Автор: Денис Аветисян
Новая система управления позволяет мобильным роботам создавать объекты с субмиллиметровой точностью даже на пересеченной местности.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"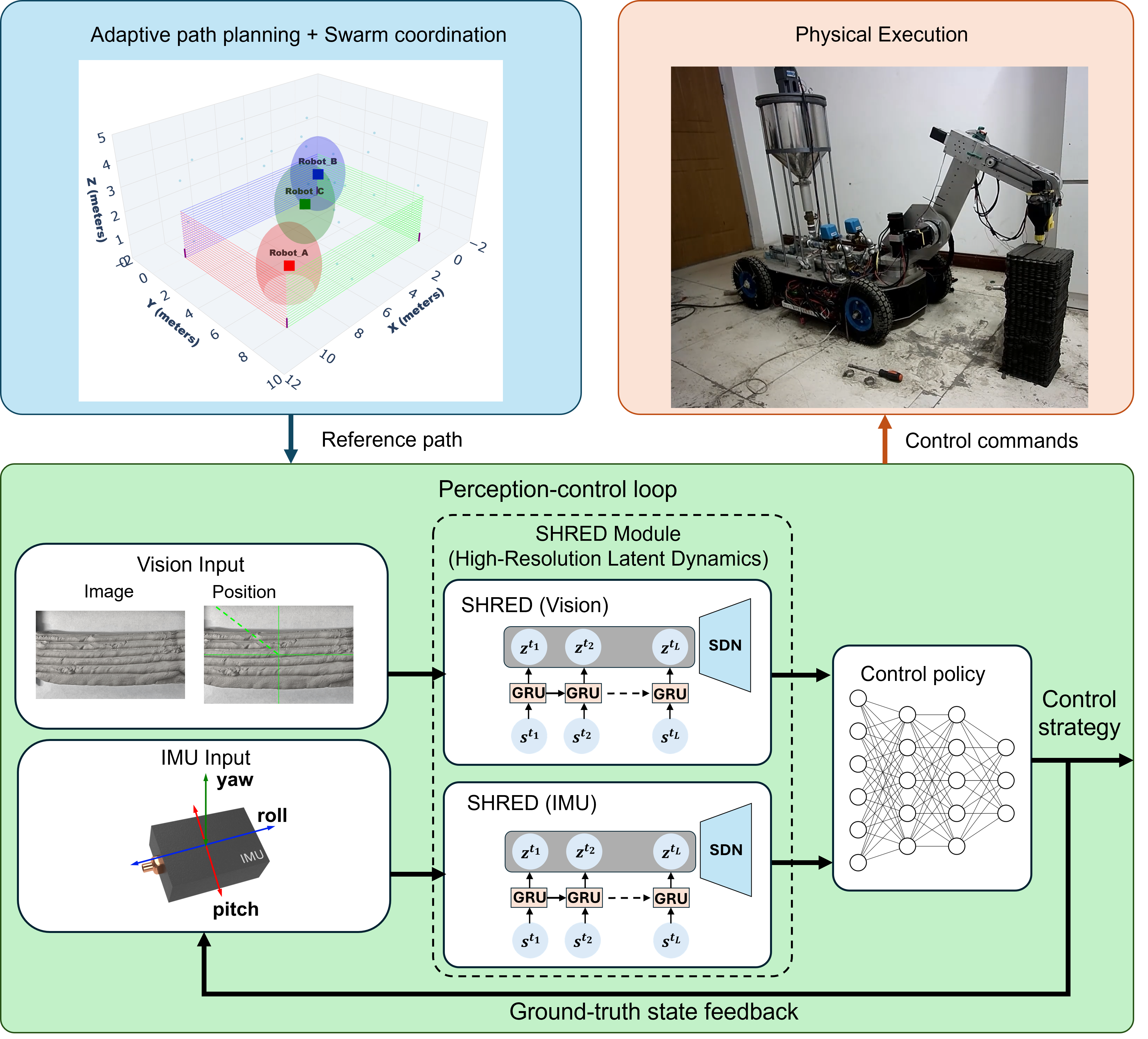
Представлена иерархическая система управления с предсказанием возмущений для адаптивной 3D-печати на неровных поверхностях.
Создание мобильных 3D-принтеров, способных работать на неровной местности, сталкивается с противоречием между необходимостью высокой точности позиционирования и сохранением мобильности платформы. В работе ‘Terrain-Adaptive Mobile 3D Printing with Hierarchical Control’ представлен инновационный подход, объединяющий искусственный интеллект, мультисенсорный анализ и иерархическое управление для решения этой задачи. Разработанная система позволяет достигать субсантиметровой точности печати при движении по пересеченной местности, предсказывая и компенсируя возмущения на основе данных с датчиков. Открывает ли это путь к созданию автономных роботизированных комплексов для строительства в труднодоступных условиях?
Преодолевая Неровности: Вызов Неструктурированной Среды
Традиционные робототехнические системы часто испытывают трудности при работе на неровной и непредсказуемой местности, что существенно ограничивает их применение в реальных строительных проектах. Привычные алгоритмы, разработанные для идеально ровных поверхностей и четко определенных маршрутов, оказываются неэффективными при столкновении с неровностями, препятствиями и изменениями в окружающей среде. Это приводит к снижению производительности, увеличению энергопотребления и, в конечном итоге, к невозможности автономного выполнения задач в условиях, приближенных к естественным строительным площадкам. Неспособность адаптироваться к неструктурированной среде требует постоянного вмешательства оператора или использования сложных, ресурсоемких систем сенсорного восприятия и планирования траектории, что сводит на нет преимущества автоматизации.
Автономная робототехника часто сталкивается с ограничениями, обусловленными необходимостью предварительно определенных карт и тщательно контролируемых условий эксплуатации. Эта зависимость создает существенный барьер для развертывания роботов в реальных, динамично меняющихся средах, где заранее невозможно учесть все возможные препятствия и неровности поверхности. Роботы, требующие детального планирования маршрута на основе статических данных, испытывают трудности при адаптации к неожиданным изменениям, что значительно снижает их эффективность и надежность в неструктурированных пространствах. В результате, возможность полноценной автоматизации строительных и других процессов в реальном мире оказывается существенно ограничена, поскольку роботы не способны эффективно функционировать без точных и актуальных данных об окружающей среде.
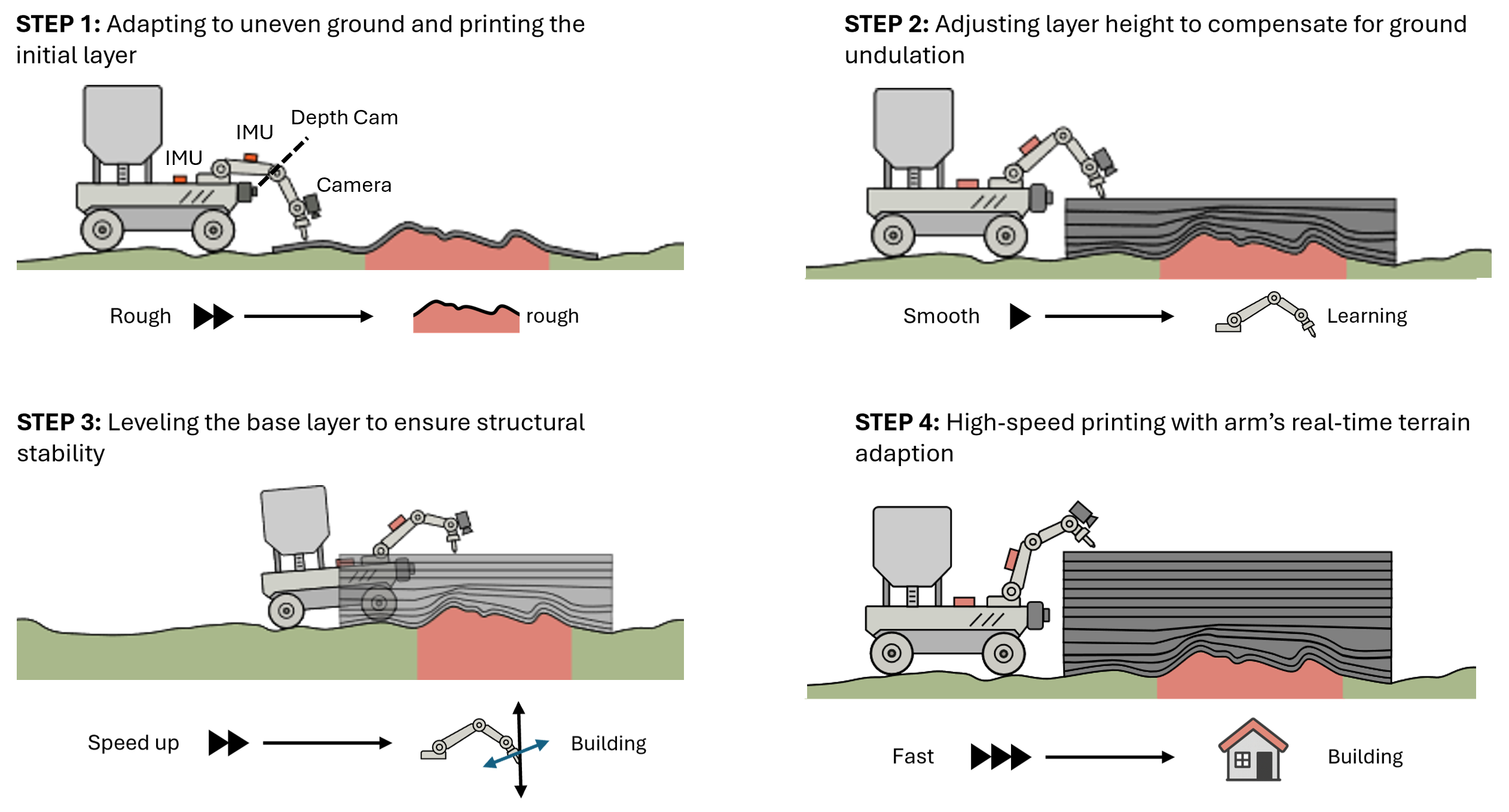
Эффективная мобильная 3D-печать предъявляет высокие требования к способности робота адаптироваться к непредвиденным препятствиям и неровностям поверхности. В отличие от стационарных систем, работающих в контролируемых условиях, мобильные роботы-строители должны самостоятельно ориентироваться в динамично меняющейся среде. Это требует разработки сложных алгоритмов восприятия и планирования траектории, позволяющих оперативно обходить помехи и сохранять стабильность процесса печати даже на пересеченной местности. Успешное решение данной задачи позволит значительно расширить возможности автоматизированного строительства, открывая путь к возведению объектов в труднодоступных местах и в условиях, где традиционные методы неэффективны или невозможны.
Современные методы автоматизированного строительства, несмотря на значительный прогресс, зачастую демонстрируют недостаточную устойчивость при работе в динамичных и неструктурированных условиях. Исследования показывают, что существующие алгоритмы планирования траектории и управления роботами испытывают трудности при столкновении с непредвиденными препятствиями, неровностями поверхности или изменениями в окружающей среде. Это приводит к снижению эффективности строительства, увеличению временных затрат и, в ряде случаев, к полной остановке процесса. Неспособность адаптироваться к постоянно меняющейся обстановке ограничивает возможности применения мобильных 3D-принтеров и других автономных строительных машин в реальных условиях, где идеальная геометрия и предсказуемость являются скорее исключением, чем правилом. Разработка новых подходов, обеспечивающих более гибкое и надежное функционирование в непредсказуемых средах, является ключевой задачей для будущего автоматизированного строительства.
Иерархическое Управление: Основа Устойчивости
Используемая нами иерархическая структура управления обеспечивает разделение функций планирования траектории высокого уровня от непосредственного управления аппаратным обеспечением. Это разделение позволяет выполнять стратегическое планирование на более медленном временном масштабе, фокусируясь на долгосрочных целях, в то время как низкоуровневое управление реализует эти планы, оперативно реагируя на изменения окружающей среды и обеспечивая стабильность и точность движения. Разделение ответственности между слоями позволяет оптимизировать каждый этап управления независимо, повышая общую эффективность и надежность системы. В рамках данной архитектуры, высокоуровневый планировщик генерирует последовательность целевых точек, а низкоуровневый контроллер отвечает за поддержание заданного положения и ориентации робота, используя данные с датчиков и управляющие воздействия на исполнительные механизмы.
В системе управления реализован предиктивный контроль, предназначенный для прогнозирования и компенсации возмущений, вызванных неровностями рельефа. Данный подход использует модели динамики и окружающей среды для предсказания будущих состояний системы и вычисления оптимальных управляющих воздействий, минимизирующих отклонения от заданной траектории. Предиктивный контроль позволяет заранее компенсировать влияние неровностей, повышая устойчивость и точность движения робота, особенно при работе на пересеченной местности. Эффективность алгоритма зависит от точности модели и скорости вычислений, что критически важно для обеспечения реакции в реальном времени.
Иерархическая архитектура управления предполагает разделение процессов планирования траектории и непосредственного управления движением по времени выполнения. Стратегическое планирование траектории, включающее определение оптимального маршрута и долгосрочных целей, осуществляется с меньшей частотой, в более медленном временном масштабе. Реактивное управление, напротив, работает в режиме реального времени, оперативно корректируя траекторию и параметры движения в ответ на немедленные изменения окружающей среды и внешние возмущения. Такое разделение позволяет системе одновременно достигать глобальных целей и обеспечивать устойчивость к локальным помехам и неровностям рельефа.
Разделение функций стратегического планирования траектории и реактивного управления позволяет достичь одновременного выполнения долгосрочных целей и обеспечения немедленной устойчивости к внешним факторам. Стратегическое планирование, выполняемое с меньшей частотой, определяет оптимальный маршрут к цели, в то время как реактивное управление, работающее в режиме реального времени, корректирует траекторию и параметры движения для компенсации возмущений, вызванных неровностями местности или другими непредвиденными обстоятельствами. Такая архитектура позволяет избежать конфликтов между долгосрочными планами и необходимостью немедленной стабилизации, обеспечивая надежное и точное выполнение задач в динамически меняющейся среде.
Предвидеть Непредвиденное: Дата-Драйвенный Отклонение от Возмущений
Ключевым компонентом системы является модуль предсказания возмущений, который обучается на взаимосвязи между особенностями рельефа местности и возникающими возмущениями платформы. Этот модуль анализирует данные о рельефе, полученные от различных сенсоров, и устанавливает статистическую зависимость между характеристиками поверхности — например, уклоном, типом грунта и наличием препятствий — и величиной и направлением возникающих возмущений платформы. В процессе обучения модуль формирует модель, позволяющую прогнозировать характер и интенсивность возмущений на основе текущих данных о местности, что необходимо для проактивной компенсации и поддержания стабильной работы платформы.
Модуль предсказания возмущений использует методы Data-Driven Modeling, в частности, разреженный регрессионный анализ (Sparse Regression), для определения наиболее информативных каналов датчиков, влияющих на точность предсказания возмущений. Разреженный регрессионный анализ позволяет выделить подмножество датчиков, которые вносят наибольший вклад в модель предсказания, игнорируя менее значимые каналы и снижая вычислительную сложность. Это достигается путем применения регуляризации L1 к коэффициентам регрессии, что приводит к обнулению коэффициентов, соответствующих неинформативным датчикам. Выбор оптимального набора датчиков, основанный на разреженном регрессионном анализе, позволяет повысить робастность и эффективность системы предсказания возмущений.
Для обеспечения всестороннего восприятия окружающей среды используется объединение данных, поступающих от инерциального измерительного блока (IMU), стереокамеры и RGB-D камеры. IMU предоставляет данные об ускорениях и угловых скоростях платформы, необходимые для оценки её движения. Стереокамера обеспечивает точную информацию о глубине и трёхмерной структуре местности. RGB-D камера, комбинируя цветное изображение с данными о глубине, позволяет идентифицировать типы поверхностей и препятствия. Совместная обработка этих разнородных данных позволяет системе создавать детальную модель окружения, необходимую для прогнозирования возмущений и обеспечения стабильной работы платформы.
Система активно компенсирует возмущения, основываясь на построении модели “Рельеф местности — Возмущение платформы”. Этот подход позволяет прогнозировать влияние особенностей рельефа на стабильность платформы и заранее вносить корректировки, минимизируя негативное воздействие. Модуль предсказания возмущений, реализующий данную функцию, обеспечивает задержку вывода 12 \text{ мс}, что позволяет осуществлять компенсацию в реальном времени и поддерживать высокую производительность системы.

Точность в Движении: Координация Шасси и Манипулятора
Для эффективной мобильной 3D-печати требуется согласованное управление как мобильной платформой, так и роботизированным манипулятором. Сложность заключается в том, что любая вибрация или несогласованность между движением шасси и работой манипулятора напрямую влияет на точность нанесения материала и, следовательно, на качество конечной конструкции. Поэтому, для достижения стабильной и точной печати в различных условиях, необходимо реализовать системы, которые обеспечивают плавную и скоординированную работу обеих систем. В противном случае, возникающие колебания могут привести к дефектам печати, снижению прочности конструкции и, в конечном итоге, к невозможности создания надежных объектов в автономном режиме. Успешная координация этих двух ключевых компонентов является основой для создания полностью функциональных мобильных 3D-печатных систем.
Координация между мобильной платформой и манипулятором значительно улучшается за счет применения частотного разложения. Данный подход позволяет анализировать и оптимизировать динамику системы в различных частотных диапазонах, что критически важно для достижения высокой точности и стабильности при печати. Разложение по частотам выявляет резонансные частоты и позволяет разработать стратегии управления, минимизирующие вибрации и обеспечивающие плавное и контролируемое движение манипулятора во время нанесения материала. В результате, система способна эффективно работать в широком спектре рабочих частот, адаптируясь к различным скоростям печати и типам поверхности, что обеспечивает стабильное качество и надежность нанесенной структуры.
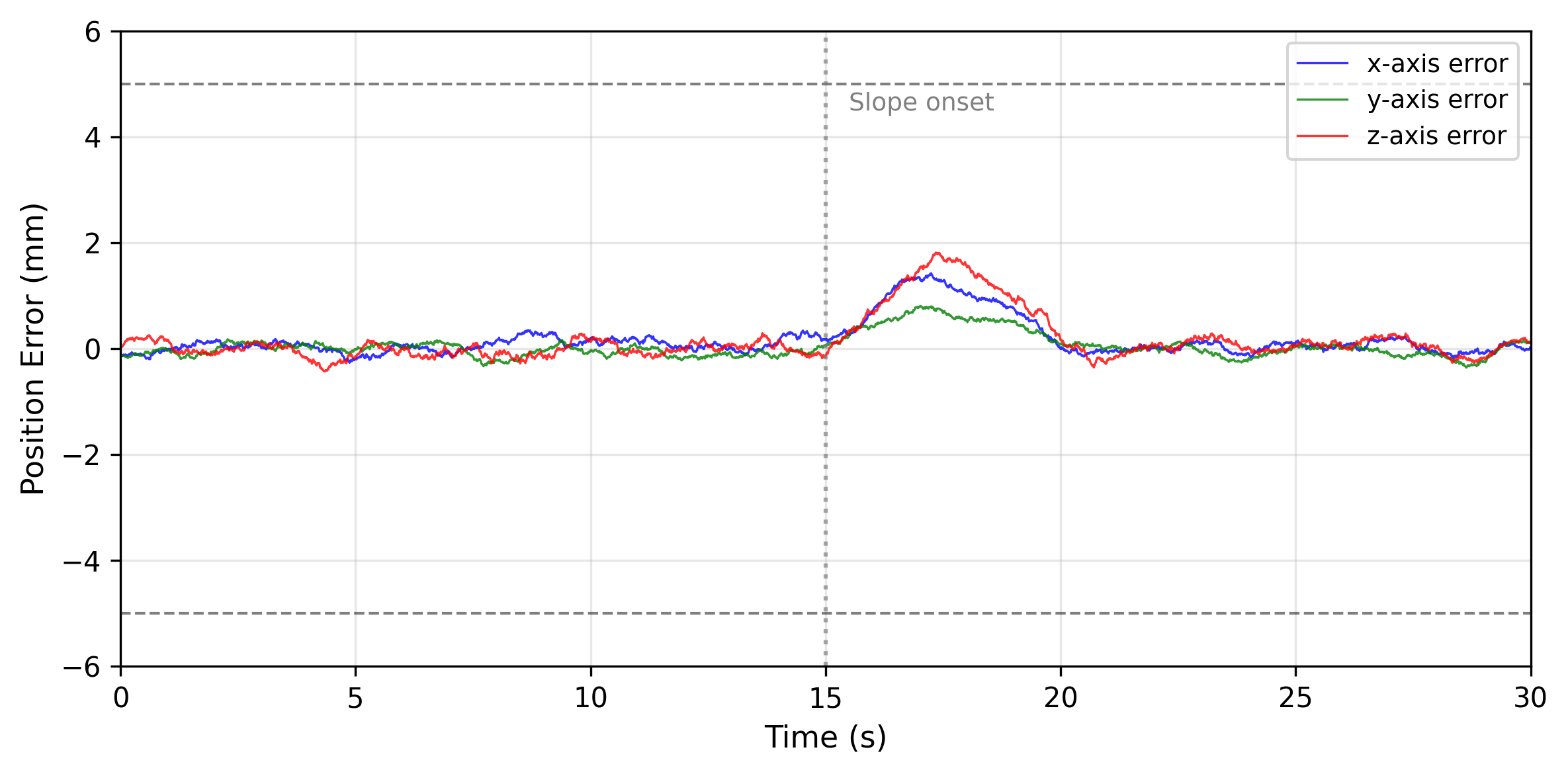
Разработанный подход позволяет значительно снизить вибрации и максимизировать точность нанесения материала при мобильной 3D-печати. Благодаря этому достигается создание прочных и надежных конструкций с минимальными отклонениями от заданной позиции — средняя погрешность составляет менее 5,1 мм на различных типах поверхности. Исследования показали, что данная методика обеспечивает стабильность процесса даже при продолжительной печати, что подтверждено непрерывной сессией длительностью 5 часов и формированием около 140 слоев без систематического накопления ошибок. Это открывает новые перспективы для автономного строительства в сложных и труднодоступных условиях, где требуется высокая точность и надежность.
Проведенные испытания продемонстрировали возможность непрерывной печати в течение пяти часов, с формированием около 140 слоев, при этом не зафиксировано какого-либо систематического накопления погрешностей. Это свидетельствует о высокой стабильности и надежности системы координации мобильной платформы и манипулятора. Полученные результаты открывают перспективные возможности для автономного строительства в сложных условиях, например, при создании объектов в труднодоступных местах или в экстремальных средах, где традиционные методы строительства неэффективны или невозможны. Стабильность процесса печати на протяжении длительного времени подчеркивает потенциал данной технологии для реализации масштабных проектов в области автоматизированного строительства и производства.

Исследование демонстрирует, что преодоление ограничений физического мира требует не просто адаптации, но и предвидения. Разработанная иерархическая система управления, использующая прогнозирование возмущений, позволяет мобильному 3D-принтеру достигать суб-сантиметровой точности даже на неровной местности. Это напоминает слова Бертрана Рассела: «Всякий, кто полагает, что он знает что-либо, не знает ничего». Подобно тому, как система управления постоянно уточняет свои модели, стремясь к точности, так и познание требует постоянного пересмотра устоявшихся представлений. Использование сенсорного синтеза для прогнозирования и компенсации возмущений подчеркивает, что понимание системы — ключ к управлению ею, а значит, и к её модификации.
Что дальше?
Представленная работа демонстрирует возможность мобильной 3D-печати на неровной местности с субсантиметровой точностью — впечатляюще, но не является ли это лишь отточенной иллюзией контроля? Попытки предсказать возмущения, основанные на данных, безусловно, эффективны, однако не скрывает ли это за собой фундаментальную проблему: мы полагаемся на прошлые возмущения для предсказания будущих. Что, если принципиально новые типы неровностей, ранее не встречавшиеся, станут причиной сбоя? Не является ли стремление к идеальной компенсации возмущений упущением возможности использовать их как источник информации о самой местности, для адаптации стратегии печати, а не просто для её исправления?
Следующим шагом представляется не столько повышение точности предсказания возмущений, сколько разработка систем, способных к обучению в процессе печати, к выявлению аномалий и к переопределению стратегии на основе этих данных. Более того, стоит задуматься о том, чтобы переосмыслить саму концепцию «неровности». Не может ли быть так, что то, что мы считаем помехой, на самом деле является потенциальной структурой, которую можно использовать для создания более прочных или функциональных объектов?
В конечном итоге, успех этого направления исследований зависит не от способности подавлять хаос, а от умения его использовать. Ведь, как известно, иногда самый эффективный способ преодолеть препятствие — это научиться танцевать вместе с ним.
Оригинал статьи: https://arxiv.org/pdf/2601.10208.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в июне 2026.
- Xiaomi Redmi R70m ОБЗОР: большой аккумулятор, плавный интерфейс
- Неважно, на что вы фотографируете!
- Huawei Mate 80 Pro ОБЗОР: много памяти, большой аккумулятор, огромный накопитель
- Российский рынок: консолидация, рубль и секторные тренды – анализ ключевых событий недели (04.06.2026 11:32)
- Sharp Aquos R10 ОБЗОР: плавный интерфейс, яркий экран, объёмный накопитель
- Oppo K14 Turbo Pro ОБЗОР: скоростная зарядка, большой аккумулятор, объёмный накопитель
- Обзор Nikon D5500 DX
- Российский рынок в штопоре: дефицит бюджета, геополитика и падение индекса Мосбиржи (06.06.2026 01:32)
- Realme 16T ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, высокая автономность
2026-01-17 02:41