Автор: Денис Аветисян
Исследователи представили систему, позволяющую людям и роботам общаться естественным языком для более эффективного и интуитивного выполнения задач физической помощи.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
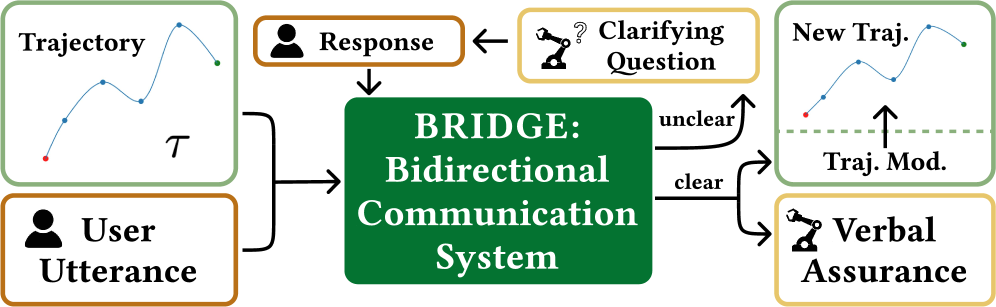
Разработана система BRIDGE, обеспечивающая двунаправленную коммуникацию между человеком и роботом, позволяющая пользователю модифицировать траектории робота посредством естественного языка и получать уточняющую обратную связь.
Эффективное физическое взаимодействие человека и робота требует систем, способных не только адаптироваться к предпочтениям пользователя, но и обеспечивать прозрачность своих действий. В данной работе, посвященной теме ‘Bidirectional Human-Robot Communication for Physical Human-Robot Interaction’, представлена система BRIDGE, позволяющая осуществлять двустороннюю коммуникацию для задач физической помощи. BRIDGE обеспечивает возможность изменения траектории движения робота — позиции, скорости и силы — в реальном времени посредством естественного языка, при этом робот предоставляет вербальную обратную связь для уточнения команд и повышения интерактивности. Может ли подобный подход к двусторонней коммуникации значительно улучшить пользовательский опыт и сделать взаимодействие с роботами более интуитивным и эффективным?
Роботы и Человек: Симфония Взаимопонимания
Традиционные роботизированные системы зачастую испытывают трудности в интерпретации тонкостей человеческих намерений, что обуславливает необходимость их точного программирования и ограниченной способности к адаптации. В отличие от гибкости, присущей человеческому взаимодействию, роботы, как правило, нуждаются в четко определенных инструкциях для выполнения даже простых задач. Это связано с тем, что они полагаются на заранее заданные алгоритмы и испытывают затруднения при столкновении с непредсказуемыми ситуациями или неоднозначными запросами. В результате, роботы, разработанные по традиционным принципам, могут оказаться неэффективными или даже небезопасными в динамичной и неструктурированной среде, где требуется понимание контекста и способность к импровизации.
Для обеспечения эффективной физической помощи робот должен уметь интерпретировать неоднозначные вербальные команды в режиме реального времени, имитируя естественное общение между людьми. В отличие от традиционных систем, требующих четких инструкций, подобный подход предполагает способность к контекстуальному пониманию и адаптации к неполной или расплывчатой информации. Робот, способный распознавать намерение, скрытое за фразой вроде «Подай, пожалуйста», а не ожидающий точного указания объекта и местоположения, становится настоящим помощником, а не просто исполнителем команд. Достижение подобной способности требует интеграции передовых методов обработки естественного языка, машинного обучения и робототехники, позволяющих роботу не просто слышать слова, но и понимать их смысл в контексте ситуации и действий человека.
BRIDGE: Архитектура Двустороннего Управления
Интерактивная система BRIDGE обеспечивает возможность изменения запланированной траектории робота посредством команд, сформулированных на естественном языке. Это позволяет пользователю оперативно корректировать действия робота, формируя тем самым совместную работу, где человек и робот действуют как партнеры. Реализация данной возможности предполагает, что пользователь может вносить изменения в план движения робота, не прибегая к сложным интерфейсам программирования или ручному управлению, что значительно повышает удобство и эффективность взаимодействия.
В основе функционирования BRIDGE лежит система двусторонней коммуникации, обеспечивающая не только прием команд от пользователя, но и предоставление роботом обратной связи о выполнении этих команд. В случае возникновения неясностей или необходимости уточнения деталей, робот активно запрашивает дополнительную информацию у пользователя, прежде чем приступить к модификации траектории. Такой подход позволяет избежать ошибок, вызванных неполным или неоднозначным пониманием запроса, и гарантирует более эффективное и предсказуемое взаимодействие между человеком и роботом.
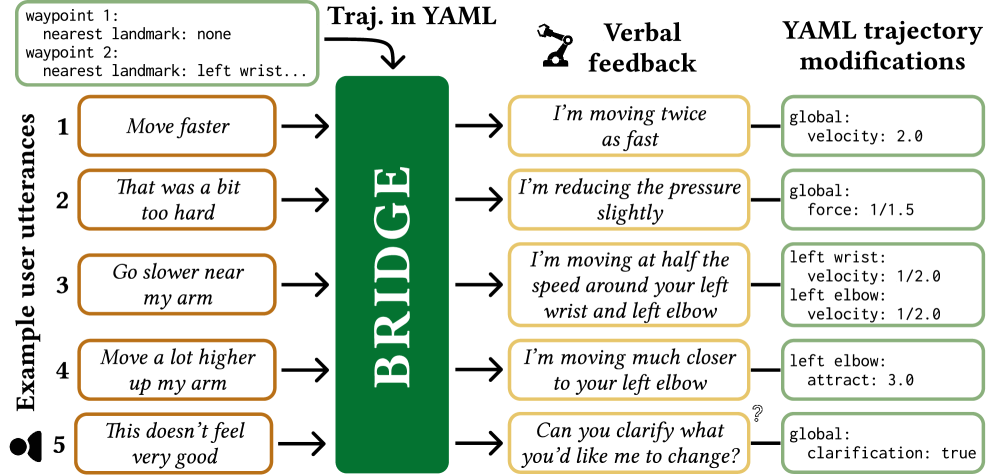
В основе системы BRIDGE лежит конвейер, использующий большие языковые модели (LLM) для обработки пользовательских запросов, выраженных естественным языком. Этот конвейер выполняет анализ входящих высказываний, извлекая из них намерения пользователя и преобразуя их в конкретные модификации траектории движения робота. Процесс включает в себя семантический разбор запроса, определение целевых изменений в плане движения и генерацию соответствующих команд для системы управления роботом. LLM обеспечивает гибкость в интерпретации разнообразных формулировок, позволяя пользователю управлять роботом интуитивно и эффективно.
От Речи к Движению: Динамическая Корректировка Траектории
Система BRIDGE использует распознавание речи для преобразования устной речи в текстовый формат, который затем обрабатывается конвейером больших языковых моделей (LLM). Этот процесс позволяет идентифицировать запрошенные изменения траектории движения робота. Распознавание речи осуществляется с использованием современных алгоритмов автоматического распознавания речи (ASR), обеспечивающих высокую точность транскрипции. Полученный текст подвергается анализу LLM для извлечения намерений пользователя относительно модификации траектории, включая целевые точки, скорость и другие параметры движения. Результаты анализа передаются в модуль планирования траектории для внесения соответствующих изменений.
Система динамической корректировки траектории робота реализуется посредством изменения параметров управления, включающих позиционирование, скорость и усилие. Корректировка позиционирования позволяет точно задавать и изменять целевые точки траектории. Управление скоростью обеспечивает плавность движения и предотвращает резкие изменения, что критически важно для безопасности. Регулировка усилия позволяет роботу адаптироваться к внешним воздействиям и обеспечивать стабильное взаимодействие с окружающей средой, например, при манипулировании объектами. Комбинированное изменение этих параметров позволяет системе генерировать и поддерживать траектории, соответствующие требованиям задачи и обеспечивающие безопасное и эффективное выполнение операций.
Траектория движения робота представляется в стандартизированном формате YAML, что обеспечивает возможность беспрепятственного обмена данными между компонентами системы и упрощает процесс модификации планов движения. Использование YAML позволяет не только структурировать информацию о целевых точках, скорости и усилиях, но и обеспечивает удобство для чтения и редактирования как человеком, так и машиной. Более того, данный формат позволяет роботу генерировать и озвучивать вербальные подтверждения о планируемых действиях, предоставляя оператору информацию о предстоящем движении и обеспечивая дополнительный уровень контроля и безопасности.
BRIDGE в Действии: Результаты Пользовательского Исследования
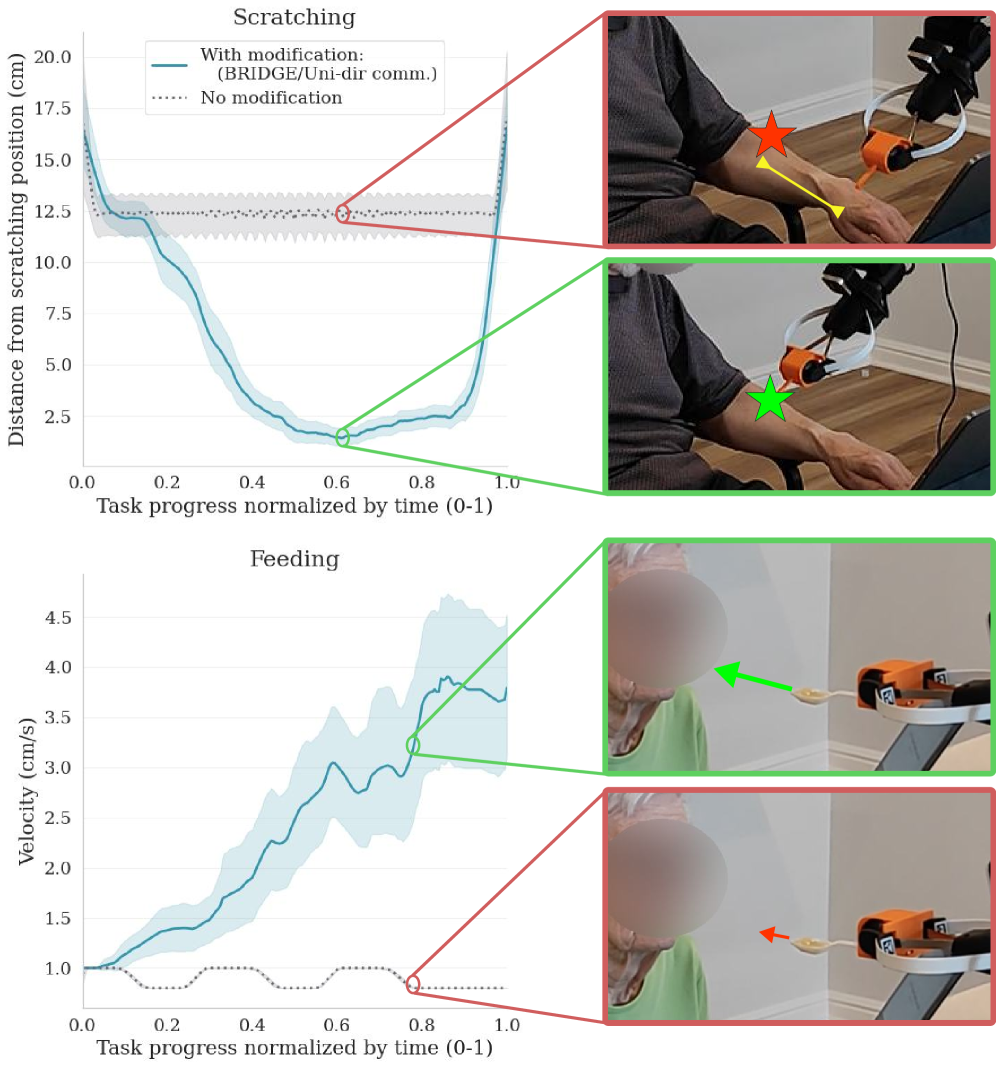
Пользовательское исследование продемонстрировало значительное улучшение интуитивности и эффективности взаимодействия человека и робота при выполнении физических задач благодаря системе BRIDGE. Участники исследования смогли более легко и быстро адаптировать поведение робота к изменяющимся условиям и своим потребностям, что привело к сокращению времени выполнения задач и снижению когнитивной нагрузки. Повышенная простота управления и возможность непосредственного влияния на траекторию движения робота позволили добиться более естественного и продуктивного сотрудничества, что указывает на перспективность системы BRIDGE для широкого спектра применений, требующих совместной работы человека и машины.
Исследование показало, что участники значительно комфортнее и эффективнее взаимодействовали с роботом, используя для изменения его траектории движения команды, сформулированные естественным языком, по сравнению с традиционными методами программирования. Вместо сложных строк кода и специализированных интерфейсов, испытуемые могли интуитивно корректировать действия робота, просто описывая желаемые изменения голосом или текстом. Это привело к снижению когнитивной нагрузки и повышению скорости выполнения задач, поскольку пользователям не требовалось осваивать сложные языки программирования или разбираться в тонкостях управления роботами. Полученные данные свидетельствуют о том, что использование естественного языка для взаимодействия с роботами открывает новые возможности для более интуитивного и эффективного сотрудничества между человеком и машиной.
Исследование продемонстрировало значительное повышение уровня воспринимаемого взаимодействия (L2), понимания (L3) и прозрачности (L4) при использовании системы BRIDGE по сравнению с односторонней коммуникацией и полным отсутствием возможности модификации траектории робота. Статистический анализ показал, что различия в этих показателях являются статистически значимыми (p<0.05, p<0.001), что указывает на то, что BRIDGE не только позволяет пользователям влиять на поведение робота, но и создает ощущение более тесного и понятного сотрудничества. Участники исследования отметили, что система BRIDGE способствует более интуитивному восприятию действий робота и лучшему пониманию его намерений, что, в свою очередь, повышает доверие к системе и эффективность совместной работы.
Исследование показало, что предоставление возможности модификации траектории движения робота, вне зависимости от способа — будь то естественный язык в системе BRIDGE или одностороннее взаимодействие — значительно повышает успешность выполнения физических задач по сравнению с ситуацией, когда изменения траектории не предусмотрены. Данный результат подчеркивает важность гибкости в процессе взаимодействия человека и робота: возможность корректировки действий робота, даже в простейшей форме, критически влияет на эффективность сотрудничества и позволяет добиться более высоких показателей в выполнении поставленных задач. Успешность как системы BRIDGE, так и односторонней коммуникации по сравнению с базовым вариантом без модификаций демонстрирует, что ключевым фактором является сам принцип предоставления контроля над действиями робота, а не конкретный метод реализации этого контроля.

Исследование демонстрирует, что взаимодействие человека и робота — это не просто передача команд, а скорее эволюционирующая экосистема. Система BRIDGE, позволяющая изменять траектории робота посредством естественного языка, подтверждает эту идею. Барбара Лисков однажды заметила: «Программы должны быть спроектированы так, чтобы изменения в одной части не приводили к неожиданным последствиям в других». Это особенно актуально в контексте физического взаимодействия, где непредсказуемые движения могут привести к нежелательным последствиям. Подобный подход к двунаправленной коммуникации позволяет создать более прозрачную и предсказуемую систему, где каждый «деплой» — это не маленький апокалипсис, а шаг к более гармоничному сотрудничеству.
Что дальше?
Представленная работа, стремясь к диалогу между человеком и машиной в физическом взаимодействии, лишь приоткрывает завесу над сложностью истинной кооперации. Масштабируемость, столь часто произносимое слово, здесь — всего лишь оправдание усложнения. Каждый добавленный уровень абстракции, каждое усовершенствование системы обработки естественного языка — это пророчество о будущей точке отказа, о непредсказуемом контексте, который система не сможет обработать. Оптимизация, как известно, всегда ведет к потере гибкости; совершенная архитектура — миф, необходимый, чтобы сохранить разум.
Настоящая проблема заключается не в точности интерпретации команд, а в способности системы к адаптации, к импровизации. Недостаточно понимать что хочет человек, необходимо понимать почему. Истинное взаимодействие — это не передача инструкций, а совместное решение проблемы, где машина становится не исполнителем, а партнером. Будущие исследования должны быть направлены не на увеличение скорости обработки, а на развитие способности системы к обучению в реальном времени, к пониманию намерений, скрытых за словами.
Системы, подобные BRIDGE, — это не инструменты, а экосистемы. Их нельзя построить, их можно лишь взрастить. И в этом взращивании, в постоянном диалоге между человеком и машиной, и кроется истинный прогресс. Вопрос не в том, как заставить машину понимать человека, а в том, как научить ее быть полезной, даже когда она не понимает.
Оригинал статьи: https://arxiv.org/pdf/2601.10796.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- 10 лучших OLED ноутбуков. Что купить в июне 2026.
- vivo S60 ОБЗОР: скоростная зарядка, объёмный накопитель, современный дизайн
- 10 лучших игровых ноутбуков. Что купить в июне 2026.
- Cubot Note 60 ОБЗОР: плавный интерфейс, большой аккумулятор
- Как сделать фотографию резкой.
- Xiaomi Redmi R70m ОБЗОР: большой аккумулятор, плавный интерфейс
- Прогнозы цен на CC: анализ криптовалюты CC
- Мозг будущего: 6G и нейроинтерфейсы
- Что такое виньетирование? Коррекция периферийного освещения в Кэнон.
- Oppo K14 Turbo Pro ОБЗОР: скоростная зарядка, большой аккумулятор, объёмный накопитель
2026-01-19 08:42