Автор: Денис Аветисян
Новая стратегия обучения позволяет роботам-гуманоидам уверенно перемещаться в сложных помещениях, избегая столкновений.
В статье представлена система HumanoidPF, объединяющая информативное представление среды и стратегию обучения с переносом из симуляции в реальность для улучшения навигации гуманоидных роботов.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"Несмотря на значительный прогресс в робототехнике, обеспечение надежной и безопасной навигации гуманоидных роботов в сложных помещениях остается сложной задачей. В данной работе, посвященной проблеме ‘Collision-Free Humanoid Traversal in Cluttered Indoor Scenes’, предлагается новый подход к обучению навигации, основанный на представлении HumanoidPF, кодирующем взаимосвязь между роботом и препятствиями в виде направлений безопасного движения. Предложенный метод значительно упрощает обучение навыкам обхода препятствий с использованием обучения с подкреплением и демонстрирует удивительно малый разрыв между симуляцией и реальным миром. Сможет ли предложенная гибридная методика генерации сцен обеспечить еще более эффективную адаптацию гуманоидных роботов к разнообразным и непредсказуемым условиям реальной среды?
Реальность против Симуляции: Вызовы Динамических Средах
В условиях реального мира, антропоморфные роботы сталкиваются с серьезными трудностями при перемещении в загроможденных и непредсказуемых средах. Неровности поверхности, неожиданное появление препятствий, а также постоянно меняющаяся обстановка требуют от систем управления высокой степени адаптивности и скорости реакции. В отличие от контролируемых лабораторных условий, где траектория движения и расположение объектов заранее известны, реальные сценарии характеризуются неполной информацией и высокой степенью неопределенности. Это требует от робота способности не только обнаруживать и идентифицировать препятствия, но и прогнозировать их возможное движение, а также оперативно корректировать собственную траекторию, чтобы избежать столкновений и обеспечить безопасное и эффективное перемещение. Сложность задачи усугубляется необходимостью учитывать динамику самого робота — его массу, инерцию и ограничения на скорость и ускорение — при планировании движения.
Традиционные методы предотвращения столкновений и планирования траектории движения для роботов часто сталкиваются с серьезными вычислительными трудностями в динамически изменяющихся средах. Суть проблемы заключается в необходимости постоянного пересчета оптимального пути при каждом изменении положения препятствий, что требует экспоненциального роста вычислительных ресурсов. При обработке информации от сенсоров в реальном времени, особенно в сложных и загроможденных пространствах, классические алгоритмы, такие как A* или Dijkstra, становятся слишком медленными для эффективной работы. Это приводит к задержкам в принятии решений, увеличению риска столкновений и снижению общей производительности робота. Поэтому разработка более эффективных и масштабируемых методов, способных адаптироваться к быстро меняющимся условиям, является ключевой задачей современной робототехники.
Существующие методы представления окружающей среды, такие как воксельные сетки и многослойные карты высот, часто оказываются недостаточными для адекватного моделирования взаимодействия гуманоидных роботов с динамичными препятствиями. Эти подходы, хотя и эффективны в статических условиях, испытывают трудности при обработке сложных геометрических форм и быстро меняющихся положений объектов, характерных для реального мира. В частности, они плохо учитывают габариты робота и необходимость поддержания безопасного расстояния до препятствий, что приводит к неоптимальным траекториям и риску столкновений. Поэтому для обеспечения надежной навигации в динамичных средах требуются более продвинутые методы восприятия, способные учитывать сложные взаимосвязи между роботом и окружающей обстановкой, включая прогнозирование движения препятствий и адаптацию к неожиданным изменениям.
HumanoidPF: Отношения важнее Координат
В отличие от традиционных карт занятости, которые просто указывают наличие или отсутствие препятствий в определенной точке пространства, HumanoidPF фокусируется на взаимосвязях между роботом-гуманоидом и окружающими его объектами. Вместо бинарного представления «свободно/занято», HumanoidPF кодирует информацию о расстоянии, относительной скорости и направлении к каждому препятствию. Это позволяет роботу не просто избегать столкновений, но и учитывать динамику окружающей среды и прогнозировать потенциальные угрозы, основываясь на векторных характеристиках взаимодействия с препятствиями. Такой подход обеспечивает более детальное и информативное представление о пространстве, необходимое для эффективного планирования траектории и принятия решений.
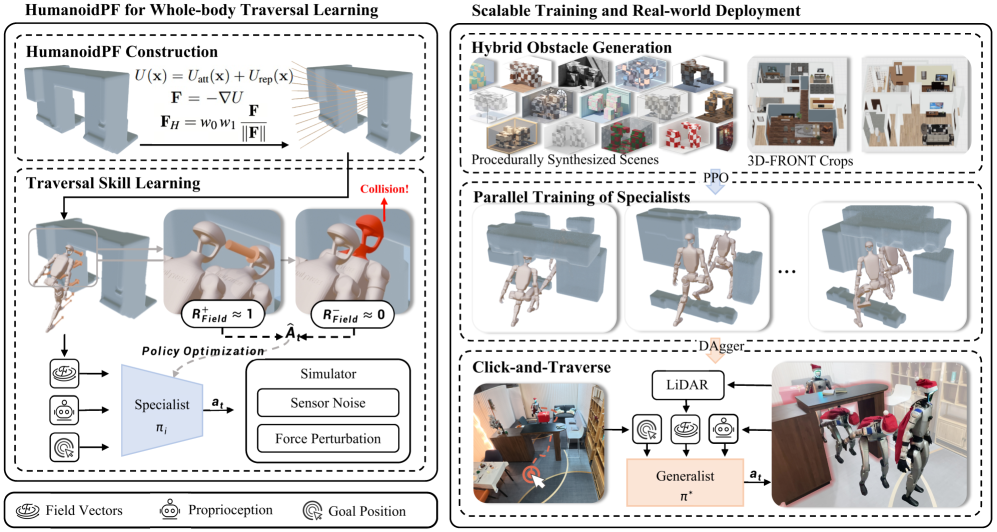
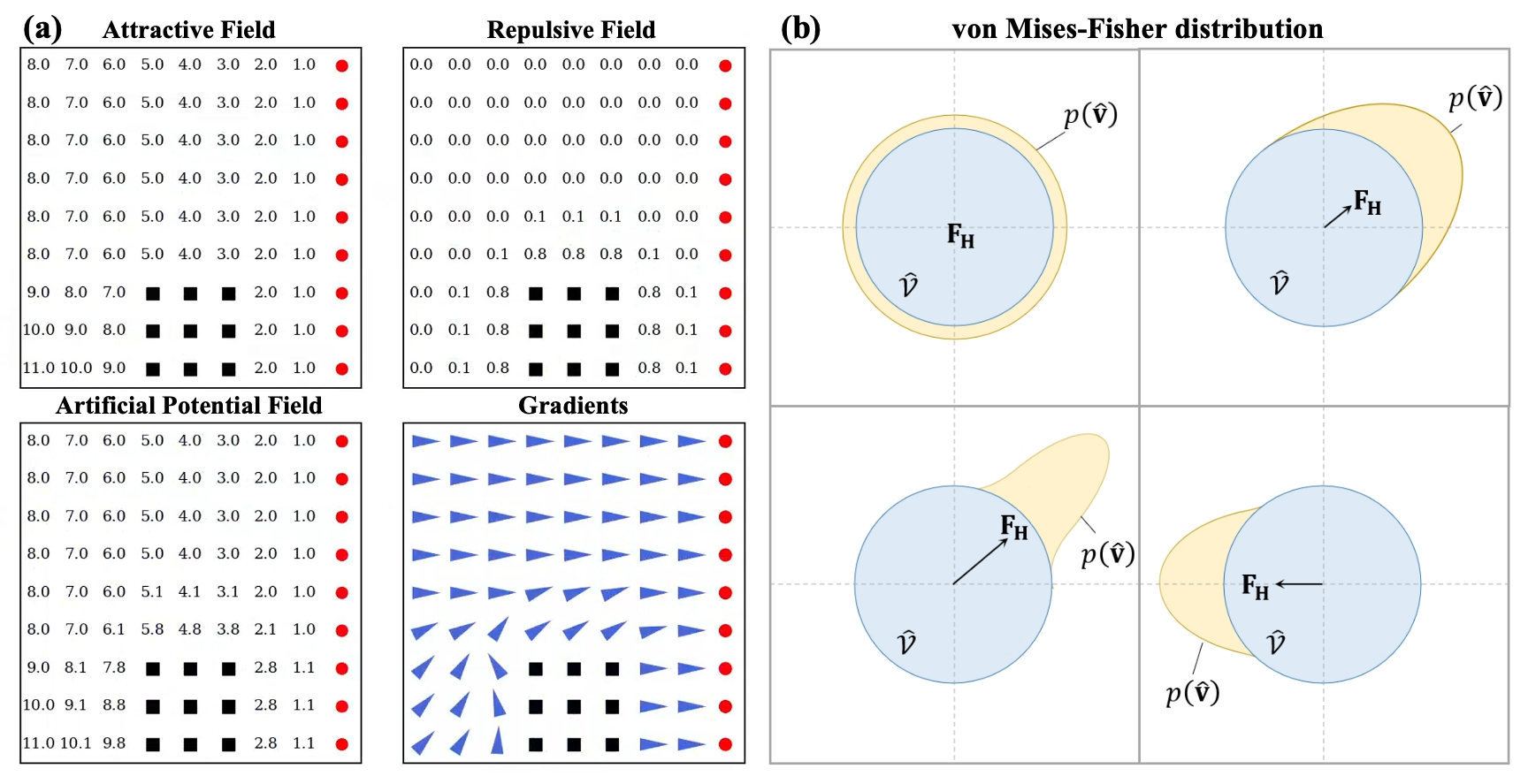
HumanoidPF использует принципы искусственных потенциальных полей (ИПП) для создания информативного представления, используемого в политике обучения с подкреплением. В отличие от традиционных ИПП, где привлекательные и отталкивающие силы определяют траекторию движения, HumanoidPF кодирует эти силы в виде вектора признаков, который напрямую передается в нейронную сеть. Этот вектор содержит информацию о силе и направлении потенциальных сил, создаваемых препятствиями, что позволяет агенту оценивать «стоимость» различных действий. Вместо прямого управления скоростью, HumanoidPF предоставляет политике представление о пространстве потенциальных сил, что позволяет более эффективно планировать траекторию и избегать столкновений, особенно в динамически меняющейся среде. Таким образом, представление HumanoidPF служит своеобразным «ландшафтом» потенциальных сил, на котором агент оптимизирует свои действия.
Представление HumanoidPF обеспечивает более эффективное предотвращение столкновений за счет учета не только наличия препятствий, но и их взаимного расположения относительно робота. Оно позволяет предвидеть потенциальные угрозы, возникающие при движении в динамичной среде, поскольку робот может оценивать изменение расстояний до препятствий и прогнозировать траектории их перемещения. Это, в свою очередь, позволяет оперативно корректировать собственную траекторию движения, избегая столкновений и поддерживая безопасное перемещение даже в сложных и непредсказуемых условиях. Благодаря этому, система способна адаптироваться к изменяющейся обстановке и реагировать на внезапные препятствия, обеспечивая повышенную надежность и безопасность функционирования робота.
Генерация Испытаний: Хаос и Контроль
Для создания разнообразных тренировочных сред используется гибридная стратегия генерации сцен. Она предполагает комбинирование реалистичных 3D-моделей интерьеров, полученных из существующих наборов данных, с процедурно сгенерируемыми препятствиями. Такой подход позволяет автоматически создавать большое количество уникальных сцен, варьируя геометрию, размер и расположение препятствий, что обеспечивает более эффективную и надежную работу робота в различных условиях.
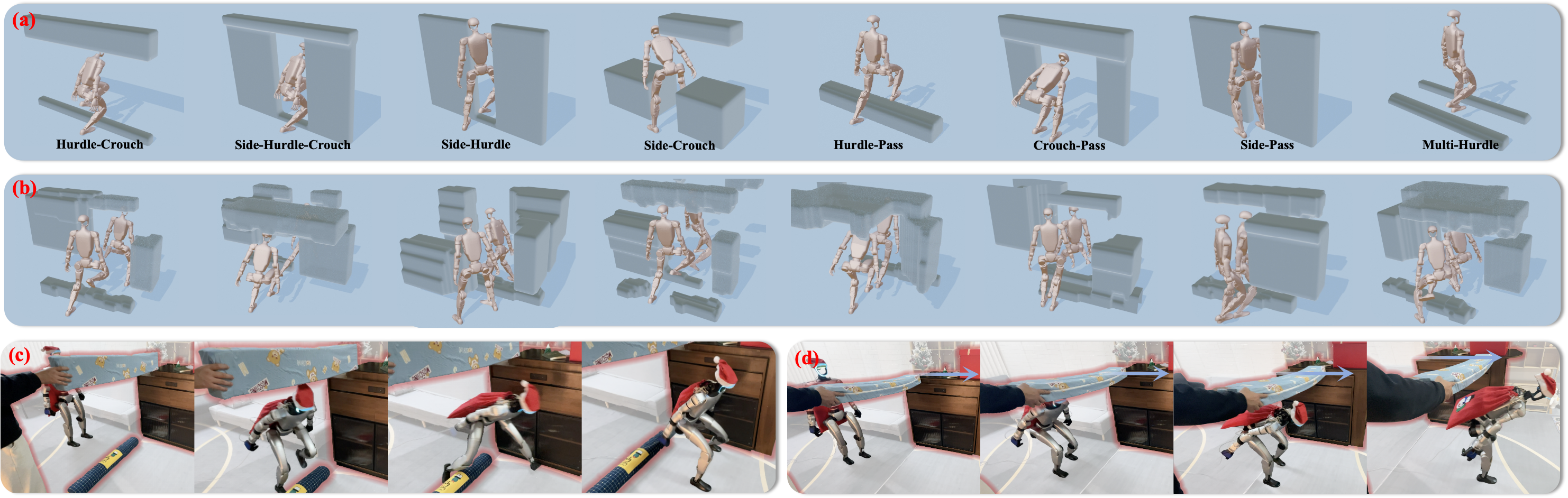
Использование разнообразных форм, размеров и конфигураций препятствий в процессе обучения робота является ключевым фактором повышения его способности к обобщению. Вариативность препятствий, генерируемых в симуляции, позволяет политике обучения (в данном случае, HumanoidPF) адаптироваться к широкому спектру реальных сценариев. Это достигается путем представления политике данных о множестве различных препятствий, что позволяет ей формировать более устойчивые стратегии обхода и преодоления, не ограничиваясь конкретными, заранее определенными конфигурациями. В результате, робот демонстрирует улучшенную производительность в новых, ранее не встречавшихся ему средах, что критически важно для применения в реальных условиях.
В процессе обучения с подкреплением, для формирования входных данных политики используется HumanoidPF. HumanoidPF представляет собой вектор наблюдений, включающий информацию о состоянии робота, его конечностях и окружающей среде. Использование HumanoidPF в качестве наблюдения позволяет политике эффективно обучаться навыкам перемещения, поскольку предоставляет необходимые данные для принятия решений о действиях, обеспечивая стабильное и быстрое освоение навыков обхода препятствий и навигации в различных условиях. Такой подход позволяет роботу адаптироваться к различным сложным сценариям и демонстрировать высокую эффективность при выполнении задач, связанных с перемещением.
К Реальному Миру: Перспективы и Достижения
Разработанный подход HumanoidPF значительно повышает способность робота ориентироваться в сложных условиях и избегать столкновений, что подтверждается обширными симуляциями. В ходе тестирования, система продемонстрировала повышенную эффективность в навигации по загроможденным пространствам, успешно обходя препятствия и сохраняя стабильность движения. Использование передовых алгоритмов прогнозирования и планирования траектории позволило роботу эффективно адаптироваться к динамически меняющейся обстановке, что критически важно для безопасной эксплуатации в реальных условиях. Результаты моделирования показывают, что HumanoidPF позволяет существенно снизить вероятность столкновений и повысить общую надежность работы робота в сложных средах.
Предложенный подход демонстрирует успешный перенос обученной политики с виртуальной среды на физического гуманоидного робота, обеспечивая надежную работу в реальных условиях. Исследования показывают, что разработанная методика позволяет значительно повысить процент успешного выполнения задач по сравнению с существующими решениями. В ходе экспериментов, робот, обученный с использованием данной технологии, стабильно демонстрирует более высокую эффективность при навигации и избежании столкновений, что подтверждает возможность масштабирования системы для применения в сложных, динамичных окружениях и открывает перспективы для создания более автономных и адаптивных робототехнических систем.
Исследования показали, что предложенный подход значительно превосходит существующие методы в обеспечении успешного выполнения задач в различных сложных условиях. В частности, зафиксировано повышение показателя успешности (Success Rate, SR) при навигации робота в восьми различных типах загроможденных сцен. Данное превосходство подтверждено и в ходе реальных экспериментов с физическим роботом-гуманоидом, что свидетельствует о надежной возможности переноса обученной модели из симуляции в реальный мир. Эти результаты указывают на существенный прогресс в создании более адаптивных и автономных роботов, способных эффективно и безопасно функционировать в окружении человека.
Данное достижение открывает перспективы для создания более автономных и адаптивных гуманоидных роботов, способных безопасно и эффективно функционировать в среде, населенной людьми. Развитие алгоритмов, обеспечивающих надежное передвижение и избежание столкновений в сложных условиях, позволяет представить роботов, способных самостоятельно ориентироваться в динамичных пространствах, таких как офисы, дома или общественные места. Это не просто улучшение технических характеристик, а шаг к интеграции роботов в повседневную жизнь, где они могут оказывать помощь, выполнять рутинные задачи и взаимодействовать с людьми, не требуя постоянного контроля и обеспечивая безопасность окружающих. Возможность успешного переноса результатов симуляций в реальный мир существенно упрощает процесс внедрения и адаптации роботов к различным сценариям использования, что делает их более доступными и практичными.
В статье описывается HumanoidPF, попытка заставить робота не спотыкаться о ножки столов в симуляции, а затем, что еще смешнее, и в реальном мире. Идея, конечно, благородная, но напоминает вечную борьбу с техническим долгом. Авторы уверяют, что добились значительного прогресса в переносе обучения из симуляции в реальность. Что ж, посмотрим, как долго эта «стабильность» продержится, когда робот столкнется с реальностью, где кошки, провода и внезапные перемещения мебели — норма. Как метко заметил Бертран Рассел: «Всякая идея, которая является общепринятой, обязательно является ложной». Особенно когда речь идет о переносе обучения. Ведь каждая «революционная» технология завтра станет техдолгом, а продакшен всегда найдет способ сломать элегантную теорию.
Что Дальше?
Представленный подход, безусловно, демонстрирует улучшение в области обхода препятствий для гуманоидных роботов. Однако, каждая «революция» в этой сфере неизбежно порождает новый уровень технического долга. Идеальный симулятор, обещающий бесшовный переход в реальный мир, остаётся утопией. Вместо этого, следует ожидать всё более изощрённых методов «латания дыр» в алгоритмах переноса, а не решения фундаментальной проблемы расхождения между виртуальной и физической реальностью. CI — это храм, в котором мы молимся, чтобы очередной, казалось бы, тривиальный предмет в реальном мире не вызвал катастрофический сбой.
Очевидно, что фокус сместится на обработку непредсказуемости. Вместо создания «идеальных» симуляций, необходимо разрабатывать алгоритмы, способные адаптироваться к неожиданностям реального мира — динамическим препятствиям, неровностям поверхности, и, конечно же, человеческому фактору. Документация, как всегда, останется мифом, созданным менеджерами, поэтому ключевым станет самообучаемость и отказоустойчивость систем.
В конечном итоге, эта работа — ещё один шаг на пути к созданию роботов, способных функционировать в сложном окружении. Но следует помнить: всё, что обещает упростить жизнь, добавит новый слой абстракции. И этот слой, рано или поздно, потребует обслуживания. Следующим шагом, вероятно, станет создание роботов, способных самостоятельно диагностировать и устранять эти абстракции, но это уже — область для новых научных статей и новых слоёв технического долга.
Оригинал статьи: https://arxiv.org/pdf/2601.16035.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок: от инфляции к инвестициям: что ждет инвесторов? (11.06.2026 02:32)
- 10 лучших OLED ноутбуков. Что купить в июне 2026.
- vivo S60 ОБЗОР: скоростная зарядка, объёмный накопитель, современный дизайн
- Как сделать фотографию резкой.
- Cubot Note 60 ОБЗОР: плавный интерфейс, большой аккумулятор
- Huawei Mate 80 Pro ОБЗОР: много памяти, большой аккумулятор, огромный накопитель
- Обзор Motorola Edge 50 Fusion
- Прогнозы цен на CC: анализ криптовалюты CC
- Xiaomi Redmi R70m ОБЗОР: большой аккумулятор, плавный интерфейс
- Обзор Nikon D5500 DX
2026-01-23 08:36