Автор: Денис Аветисян
Исследователи представили HapticMatch — комплексный подход, позволяющий создавать реалистичные тактильные ощущения на основе визуальных данных.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"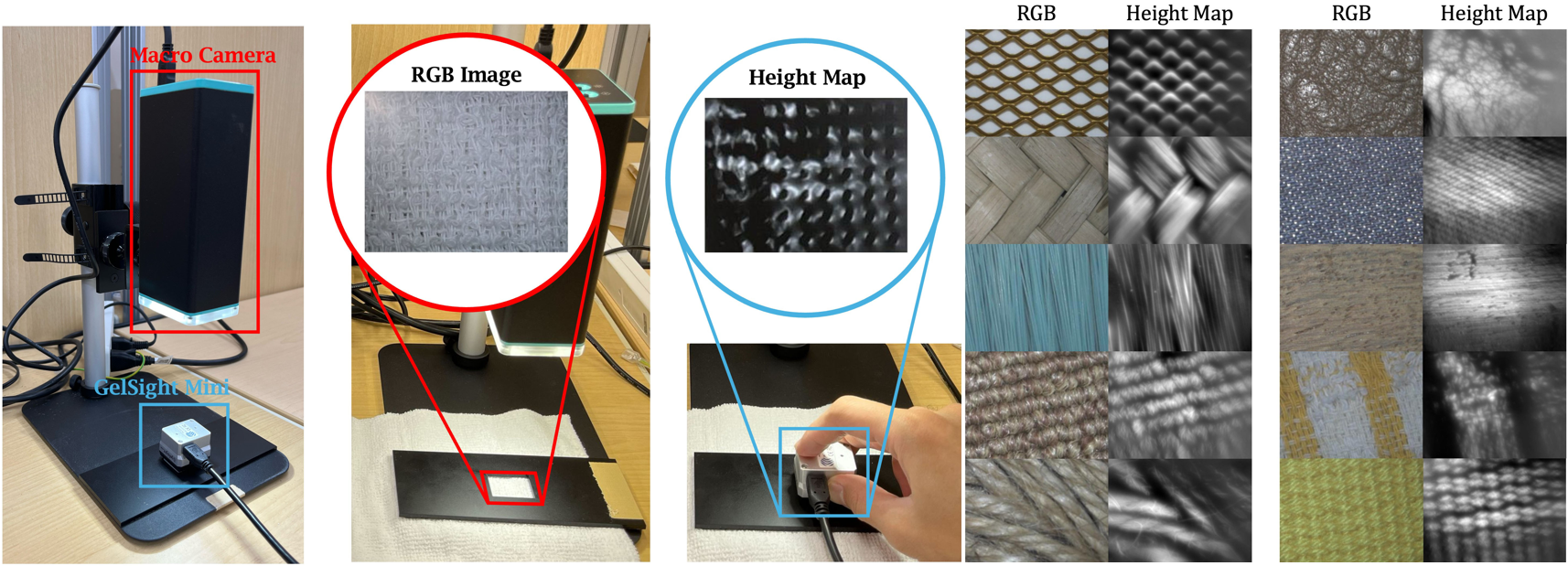
В статье представлен новый датасет и генеративные модели (включая диффузионные и Flow Matching) для преобразования визуальной информации в тактильные ощущения.
Несмотря на растущую потребность в реалистичной тактильной обратной связи для иммерсивных сред, создание достоверных текстур ощущений остается сложной задачей для дизайнеров. В данной работе, представленной под названием ‘HapticMatch: An Exploration for Generative Material Haptic Simulation and Interaction’, предлагается новый подход к генерации тактильных ощущений из визуальных данных. Мы представляем набор данных и генеративные модели, включая диффузионные модели и Flow Matching, способные синтезировать реалистичные геометрии поверхностей и тактильные ощущения непосредственно из стандартных RGB-изображений. Открывает ли это путь к созданию более реалистичных и доступных виртуальных взаимодействий, стирая грань между визуальным и тактильным восприятием в VR/AR интерфейсах?
Ощущения вне экрана: Погружение через тактильную обратную связь
Современные цифровые интерфейсы, несмотря на впечатляющий визуальный прогресс, в значительной степени игнорируют тактильные ощущения, что создает ощутимый барьер для достижения полного погружения. В то время как зрение и слух активно задействуются, отсутствие реалистичной обратной связи через осязание лишает взаимодействие с виртуальным миром необходимой полноты. Это особенно заметно в сферах, где тактильные ощущения играют ключевую роль — от ощущения текстуры материала в дизайне до реалистичного управления инструментами в виртуальной реальности. Игнорирование этого чувства приводит к ощущению отстраненности и неполноты опыта, препятствуя формированию истинного присутствия в цифровом пространстве и ограничивая потенциал взаимодействия человека с технологиями.
Воссоздание реалистичных тактильных ощущений, известное как тактильная обратная связь, или хаптическая отдача, приобретает все большее значение в широком спектре областей. От повышения уровня погружения в виртуальные игры и создание более интуитивно понятных интерфейсов до революционных изменений в медицине и промышленности — потенциал этой технологии огромен. В частности, в сфере телемедицины и удаленной хирургии тактильная обратная связь позволяет врачам ощущать текстуру тканей и сопротивление инструментов, обеспечивая необходимую точность и контроль, как если бы операция проводилась непосредственно у пациента. Аналогично, в робототехнике и промышленном управстве, хаптические системы позволяют операторам дистанционно манипулировать сложными механизмами с высокой степенью чувствительности, минимизируя риск ошибок и повышая эффективность работы.
Создание убедительных тактильных ощущений требует тесной интеграции визуальной информации и тактильной визуализации. Исследования показывают, что мозг воспринимает окружающий мир как единое целое, и несоответствие между тем, что человек видит и чувствует, может значительно снизить уровень погружения и реалистичности. Для достижения максимального эффекта, системы тактильной обратной связи должны не просто воспроизводить текстуру или форму объекта, но и учитывать его визуальные характеристики, такие как цвет, освещение и движение. Это позволяет создать более целостный и правдоподобный опыт, обманывая мозг и заставляя его поверить в реальность происходящего. Разработка алгоритмов, способных синхронизировать визуальные и тактильные данные, является ключевой задачей в области виртуальной и дополненной реальности, а также в таких приложениях, как телехирургия и роботизированные системы управления.
От зрения к осязанию: Мощность визуально-тактильного преобразования
Генерация тактильных ощущений из визуальных данных, или визуально-тактильное преобразование, позволяет создавать ощущения прикосновения на основе анализа изображений. Эта технология открывает новые возможности для иммерсивного взаимодействия, позволяя пользователям «ощущать» виртуальные объекты и среды, не прибегая к физическому контакту. Принцип работы заключается в преобразовании визуальной информации в данные, управляющие тактильными устройствами, что обеспечивает передачу информации о текстуре, форме и жесткости объектов. Это находит применение в различных областях, включая виртуальную реальность, обучение, телеробототехнику и помощь людям с ограниченными возможностями.
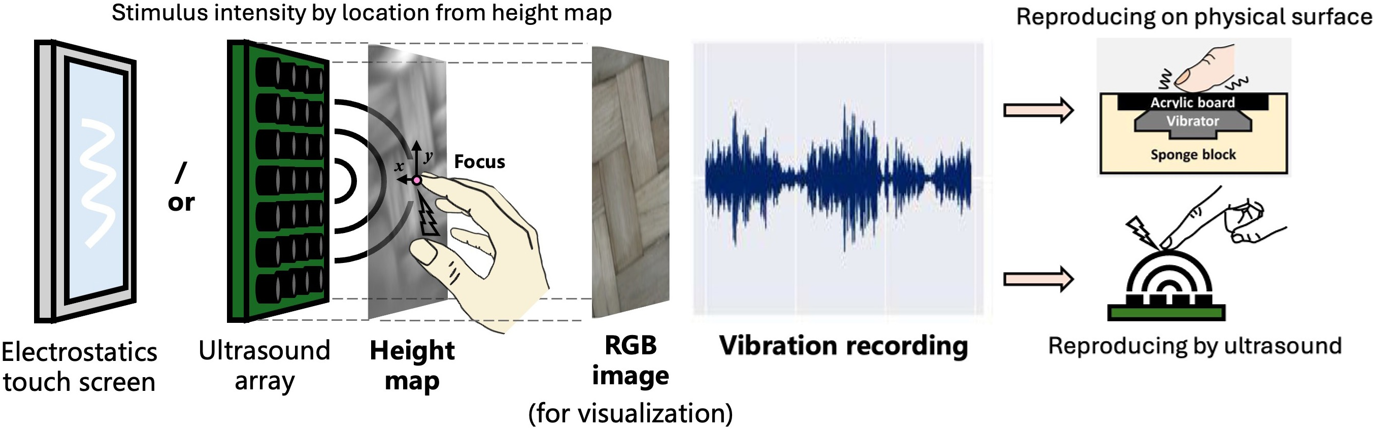
Процесс генерации тактильных ощущений из визуальных данных основывается на точной синтезации данных о высоте (Height Map) и вибрационном сигнале (Vibration Signal) из исходного изображения. Данные Height Map представляют собой карту глубины, кодирующую трехмерную форму поверхности объекта, в то время как Vibration Signal определяет частоту и амплитуду вибраций, которые передаются пользователю через тактильное устройство. Точность синтеза этих двух типов данных критически важна для реалистичного воссоздания ощущения прикосновения к виртуальной поверхности, поскольку именно они совместно определяют воспринимаемую текстуру и форму объекта. Для эффективной генерации требуется алгоритмическая обработка изображения с целью извлечения информации о геометрии и материальных свойствах поверхности, которая затем преобразуется в соответствующие Height Map и Vibration Signal.
Для обеспечения высокой точности генерации тактильных ощущений из визуальных данных критически важен качественный обучающий набор данных. Набор данных ‘HapticMatch Dataset’ содержит согласованные данные для 100 различных материалов, включающие визуальные изображения, карты высот (height maps), представляющие рельеф поверхности, и сигналы вибрации, необходимые для воссоздания тактильных ощущений. Согласованность этих данных — визуальной информации, геометрии поверхности и динамических характеристик — позволяет обучать модели, способные реалистично передавать текстуру и жесткость материалов при тактильном взаимодействии.
Данные и фундамент синтеза
Набор данных ‘HapticMatch Dataset’ был создан с использованием датчика ‘GelSight’, который позволяет получать карты высот поверхности с высоким разрешением. Датчик ‘GelSight’ основан на принципе отражения света от поверхности объекта, что позволяет точно измерять микроскопические неровности. Полученные карты высот представляют собой детальное представление топографии поверхности и служат ключевым компонентом набора данных для задач, связанных с тактильным восприятием и синтезом. Разрешение карт высот, получаемых с помощью ‘GelSight’, достигает 500 \times 500 пикселей, что обеспечивает высокую детализацию и точность представления поверхности.
Для обучения генеративных моделей используется комплексный набор данных, состоящий из высокоразрешающих карт высоты поверхности, полученных с помощью сенсора GelSight, визуальных изображений и соответствующих сигналов вибрации. Комбинация этих модальностей обеспечивает надежную основу для создания моделей, способных генерировать реалистичные тактильные ощущения. Визуальная информация помогает в понимании контекста поверхности, а сигналы вибрации предоставляют данные о динамических взаимодействиях, что существенно улучшает качество генерируемых тактильных ощущений и позволяет создавать более правдоподобные симуляции.
Анализ свойств поверхности с использованием метрик, таких как спектральная плотность мощности (PSD), играет ключевую роль в понимании и воспроизведении реалистичных тактильных ощущений. PSD позволяет количественно оценить распределение энергии по различным пространственным частотам на поверхности, что напрямую связано с восприятием шероховатости, текстуры и других тактильных характеристик. Более высокие значения PSD на определенных частотах указывают на преобладание определенных структурных элементов на поверхности, влияющих на тактильные ощущения. Использование PSD в качестве количественного показателя позволяет создавать модели, способные генерировать и распознавать тактильные ощущения, соответствующие различным поверхностям, и улучшает точность воспроизведения реалистичных тактильных взаимодействий в виртуальных средах и роботизированных системах.
Генеративные модели для реалистичного тактильного рендеринга
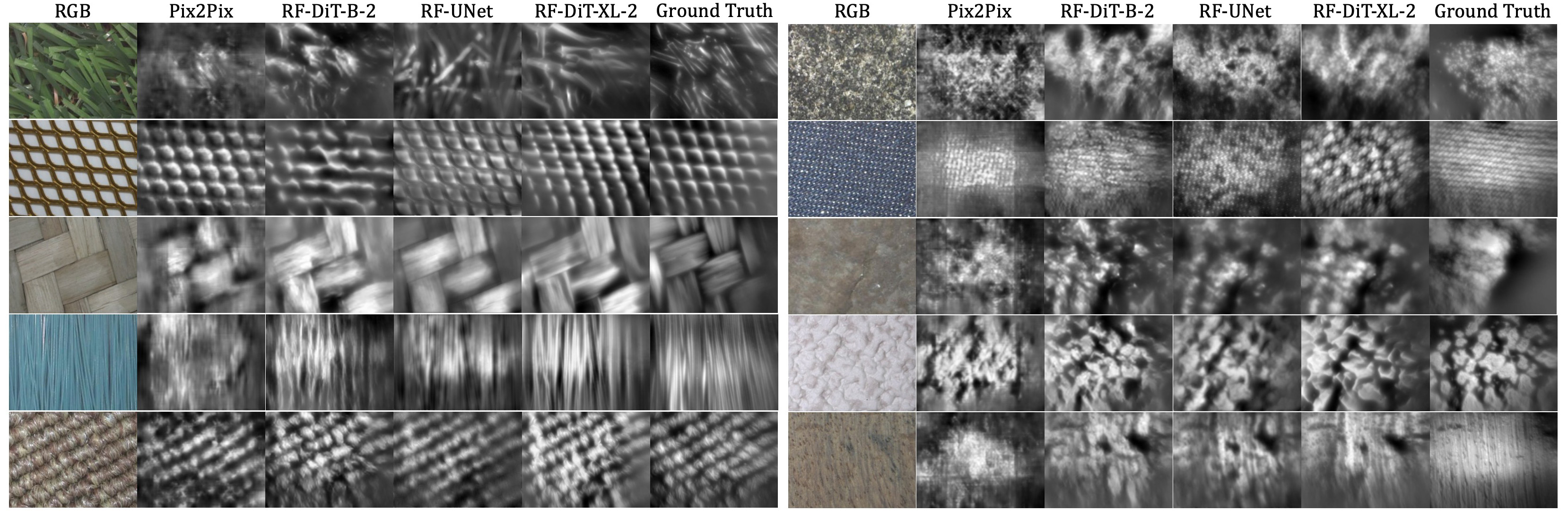
Диффузионные модели и генеративно-состязательные сети (GAN) представляют собой эффективные методы для генерации карт высот на основе визуальных данных. Диффузионные модели работают путем постепенного добавления шума к входному изображению, а затем обучения нейронной сети для обратного процесса — удаления шума и восстановления исходного изображения, что позволяет создавать новые, реалистичные карты высот. GAN, в свою очередь, состоят из двух сетей — генератора, создающего карты высот, и дискриминатора, оценивающего их реалистичность. В процессе обучения эти сети соревнуются друг с другом, что приводит к генерации высококачественных карт высот, имитирующих визуальные особенности исходного изображения. Оба подхода активно используются для создания тактильных ощущений в виртуальной реальности и роботизированных системах.
Архитектуры, такие как Latent Diffusion Model и UNet, значительно повышают эффективность и качество генеративных моделей, используемых для создания карт высот. Latent Diffusion Model, в частности, работает в латентном пространстве, что снижает вычислительные затраты и требования к памяти по сравнению с моделями, работающими непосредственно с пикселями. UNet, благодаря своей U-образной структуре с энкодером и декодером, эффективно захватывает как глобальный контекст, так и локальные детали изображения, что критически важно для точного воспроизведения текстуры поверхности. Комбинация этих архитектур позволяет генерировать высококачественные карты высот с повышенной скоростью и меньшими ресурсами.
Недавние достижения в области генеративных моделей для реалистичной тактильной визуализации основываются на методе ‘Flow Matching’, который позволяет повысить качество генерируемых данных. В частности, архитектуры ‘DiT-B-2’ и ‘DiT-XL-2’ демонстрируют улучшенные результаты по сравнению с предыдущими подходами. ‘DiT-B-2’ представляет собой архитектуру, оптимизированную для баланса между вычислительной эффективностью и качеством генерируемых тактильных карт, в то время как ‘DiT-XL-2’ — более крупная модель, предназначенная для достижения максимального уровня детализации и реалистичности. Обе архитектуры используют принципы обучения на основе потока, что позволяет им эффективно моделировать сложные распределения данных и генерировать высококачественные тактильные ощущения.
Подтверждение перцептивного реализма и перспективы на будущее
Для количественной оценки реалистичности сгенерированных карт высот используется метрика LPIPS, оценивающая перцептивное сходство между сгенерированными и эталонными изображениями. Результаты, представленные в таблице 2, демонстрируют, что методы, основанные на DiT-совпадении потоков, демонстрируют превосходство над другими моделями по показателям LPIPS. Это указывает на то, что данные методы способны генерировать карты высот, которые воспринимаются человеком как более реалистичные и близкие к исходным данным, что является важным шагом на пути к созданию более убедительных и захватывающих виртуальных сред.
Достижения в области генерации реалистичных тактильных ощущений открывают широкие перспективы для создания принципиально новых иммерсивных систем. В частности, виртуальная реальность получит возможность предоставить пользователям не только визуальные и звуковые, но и тактильные ощущения, значительно повышая степень погружения и реалистичности. Робототехника, в свою очередь, сможет оснащаться системами, позволяющими роботам более точно взаимодействовать с окружающей средой и манипулировать объектами, основываясь на тактильной обратной связи. Не менее значимо применение этих технологий в области вспомогательных устройств для людей с ограниченными возможностями, где тактильные ощущения могут восстанавливать утраченные функции или предоставлять новые способы взаимодействия с миром, расширяя их возможности и улучшая качество жизни.
В дальнейшем исследования будут направлены на разработку тактильной обратной связи в реальном времени и персонализированных тактильных ощущений, стремясь к созданию бесшовной интеграции между цифровым и физическим мирами. Представленная работа демонстрирует, что методы Flow-matching, основанные на DiT, значительно превосходят другие модели по метрике PSD MSE (таблица 2), что указывает на их потенциал в создании более реалистичных и убедительных взаимодействий с виртуальной средой. Это открывает возможности для усовершенствования систем виртуальной реальности, робототехники и вспомогательных технологий, позволяя пользователям ощущать виртуальные объекты так, как если бы они были реальными.
Исследование, представленное в данной работе, стремится к упрощению восприятия сложного мира материалов посредством генеративных моделей. Создание реалистичных тактильных текстур из визуальных образов — задача, требующая предельной ясности и лаконичности подхода. Как говорил Давид Гильберт: «Вся математика скрыта в лаконичных формулах». Аналогично, в данном исследовании, суть сложного процесса визуально-тактильного преобразования заключена в элегантности алгоритмов, стремящихся к максимальной простоте и эффективности. Сосредоточенность на генерации высотных карт как ключевом элементе тактильного рендеринга демонстрирует стремление к очищению от избыточности, оставляя лишь необходимое для достижения желаемого результата.
Куда же дальше?
Представленная работа, хотя и демонстрирует возможность синтеза тактильных ощущений из визуальных данных, лишь слегка приоткрывает завесу над истинной сложностью восприятия. Вопрос не в генерации карт высот, а в понимании того, как мозг интерпретирует эти данные, как формируется ощущение «материала». Существующие модели, по сути, лишь имитируют внешний вид, а не внутреннюю суть.
Очевидным ограничением является зависимость от визуального ввода. В реальном мире тактильные ощущения часто предшествуют визуальным, формируя первичные представления об объекте. Следующим шагом представляется разработка моделей, способных генерировать тактильные ощущения автономно, опираясь на абстрактные параметры, а не на изображения. Попытки обойти визуальную зависимость — не прихоть, а необходимость.
И, пожалуй, самое важное: необходимо отказаться от иллюзии «реалистичности». Задача не в том, чтобы обмануть сенсоры, а в том, чтобы создать новые, уникальные тактильные ощущения, выходящие за рамки привычного. Стремление к «фотореализму» — лишь отвлекающий маневр. Истинная ценность — в создании принципиально новых форм взаимодействия.
Оригинал статьи: https://arxiv.org/pdf/2601.16639.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- 10 лучших OLED ноутбуков. Что купить в июне 2026.
- Российский рынок: от инфляции к инвестициям: что ждет инвесторов? (11.06.2026 02:32)
- vivo S60 ОБЗОР: скоростная зарядка, объёмный накопитель, современный дизайн
- Cubot Note 60 ОБЗОР: плавный интерфейс, большой аккумулятор
- Как сделать фотографию резкой.
- Xiaomi Redmi R70m ОБЗОР: большой аккумулятор, плавный интерфейс
- Обзор Motorola Edge 50 Fusion
- Прогнозы цен на CC: анализ криптовалюты CC
- Мозг будущего: 6G и нейроинтерфейсы
- Синхронизация вспышки. Что такое Sync speed и режим FP.
2026-01-26 07:12