Автор: Денис Аветисян
Исследователи разработали доступную и точную систему нейронавигации для транскраниальной магнитной стимуляции, использующую визуальные метки и дополненную реальность.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"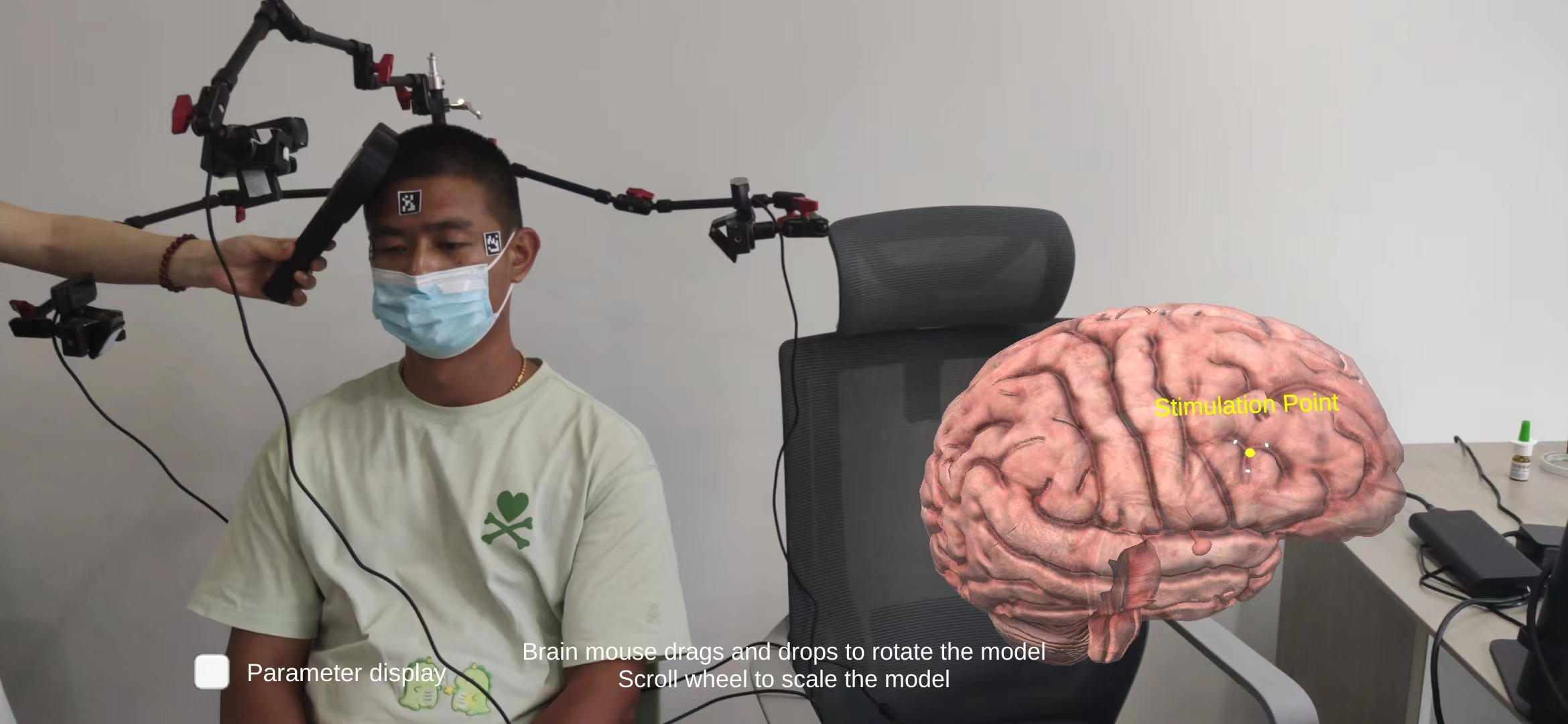
Представлена система нейронавигации на основе оптических маркеров и многокамерной системы для повышения точности неинвазивной стимуляции мозга.
Высокая стоимость и сложность современных систем нейронавигации ограничивают широкое применение неинвазивной стимуляции мозга. В данной работе, посвященной разработке ‘Optical Tag-Based Neuronavigation and Augmentation System for Non-Invasive Brain Stimulation’, представлена альтернативная система, использующая компьютерное зрение, оптическое отслеживание с помощью маркеров и дополненную реальность для повышения точности и удобства процедур транскраниальной магнитной стимуляции. Предложенный подход позволяет реализовать отслеживание в реальном времени и визуализацию положения катушки стимуляции непосредственно на голове пациента. Может ли эта система стать доступным и эффективным инструментом для широкого круга клинических и исследовательских задач в нейростимуляции?
Трудности современной нейрохирургической навигации
Традиционные нейронавигационные системы, несмотря на свою ценность, зачастую основаны на отслеживании одной точки или требуют громоздкой настройки, что существенно ограничивает возможность адаптации в реальном времени во время хирургических вмешательств. Данный подход требует от хирурга предварительной и точной регистрации данных, после чего система может испытывать трудности при малейших изменениях положения пациента или инструментов. Отсутствие гибкости может приводить к необходимости повторной регистрации или ручной коррекции, отнимая драгоценное время и повышая риск неточностей при манипуляциях в критически важных областях мозга. В результате, потребность в системах, способных оперативно реагировать на динамические изменения в операционном поле, становится все более актуальной для повышения безопасности и эффективности нейрохирургических операций.
Точность нейрохирургических вмешательств подвержена влиянию даже незначительных смещений пациента или инструментов, что требует разработки надёжных систем трекинга. Непреднамеренные движения больного во время операции или дрейф хирургического инструмента могут привести к отклонению от запланированной траектории, увеличивая риск повреждения окружающих тканей. Поэтому, создание устойчивых к подобным факторам систем навигации является критически важной задачей, обеспечивающей высокую степень безопасности и эффективности нейрохирургических процедур, особенно при работе с чувствительными структурами мозга. Именно поэтому современные разработки направлены на минимизацию влияния внешних факторов и обеспечение непрерывного, высокоточного отслеживания инструментов в реальном времени.
Существующие методы нейронавигации, такие как электромагнитное отслеживание, сталкиваются с существенными ограничениями, обусловленными влиянием металлических имплантатов и инструментов, что приводит к искажению сигнала и снижению точности позиционирования. Оптические системы, в свою очередь, требуют прямой видимости между трекером и инструментом, что затрудняет их применение в глубоких или труднодоступных областях мозга, а также при динамичном изменении положения оперируемого участка. Эти факторы существенно ограничивают возможности современных нейрохирургов, подчеркивая необходимость разработки альтернативных систем, способных эффективно работать в сложных условиях операционной среды и обеспечивать надежное и точное отслеживание инструментов в реальном времени.
Ограничения существующих систем нейронавигации подчеркивают потребность в разработке более совершенного инструмента, способного обеспечить как высокую точность, так и гибкость в сложных хирургических условиях. Современные вмешательства в области нейрохирургии часто требуют манипуляций в труднодоступных областях, где даже незначительное отклонение от намеченной траектории может привести к серьезным последствиям. Поэтому крайне важно, чтобы система нейронавигации могла адаптироваться к изменениям положения пациента или инструмента в режиме реального времени, компенсируя искажения, вызванные помехами или анатомическими особенностями. Разработка подобной системы предполагает интеграцию передовых технологий отслеживания, алгоритмов коррекции и интуитивно понятного интерфейса, что позволит хирургам с уверенностью выполнять сложные операции, минимизируя риски и повышая эффективность лечения.
Многокамерная система на базе компьютерного зрения
Система использует многокамерную конфигурацию для обеспечения полного обзора операционного поля. Применение нескольких камер позволяет отслеживать положение инструментов и анатомических ориентиров даже при частичном перекрытии объектов, что критически важно в условиях динамичной хирургической среды. Одновременный сбор данных с нескольких ракурсов значительно повышает надежность и устойчивость системы к временным окклюзиям, обеспечивая непрерывное отслеживание на протяжении всей процедуры. Такой подход позволяет минимизировать влияние заслонений на точность определения координат и ориентации отслеживаемых объектов.
Система использует алгоритмы компьютерного зрения для анализа изображений, получаемых с нескольких камер, с целью обнаружения и отслеживания специальных маркеров — AprilTags. Данные маркеры размещаются как на теле пациента, так и на хирургических инструментах. Процесс включает в себя идентификацию маркеров на изображениях с каждой камеры, а затем их последовательное отслеживание во времени. Использование нескольких камер позволяет повысить надежность отслеживания, особенно в условиях частичной видимости или перекрытия маркеров, за счет объединения данных с разных ракурсов и компенсации ошибок, возникающих при обработке изображений с одной камеры.
Для точного определения трехмерных координат и ориентации отслеживаемых объектов применяется метод прямой линейной трансформации (Direct Linear Transform, DLT). Данный метод позволяет вычислить положение объекта в пространстве на основе соответствия между его двумерной проекцией на изображениях с нескольких камер и известными трехмерными координатами контрольных точек. \mathbf{x} = \mathbf{P} \mathbf{X} , где \mathbf{x} — координаты точки на изображении, \mathbf{X} — трехмерные координаты точки в мировом пространстве, а \mathbf{P} — матрица проекции. Решение системы уравнений, полученной для нескольких точек, позволяет определить параметры матрицы проекции и, следовательно, трехмерное положение объекта. Применение DLT обеспечивает высокую точность и устойчивость к шумам, что критически важно для задач отслеживания в хирургической среде.
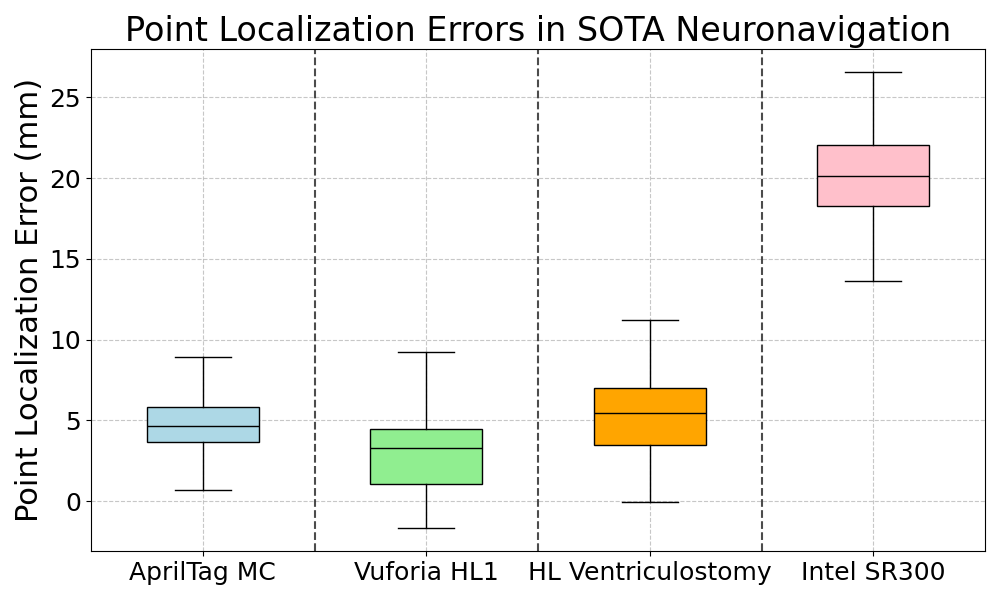
Для повышения точности отслеживания и минимизации шума, система использует метод Гауссовского объединения ошибок (Gaussian Error Combination) для интеграции данных, полученных с нескольких камер. Этот метод статистически взвешивает данные от каждой камеры, основываясь на оценке её точности, что позволяет получить более надежную и точную оценку 3D-положения и ориентации отслеживаемых объектов. В результате применения данного метода, средняя ошибка локализации составляет 4.94 мм, что сопоставимо с показателями современных высокоточных систем отслеживания.

Интеграция с дополненной реальностью для навигации в реальном времени
Для визуализации анатомических моделей и хирургических планов непосредственно на голове пациента была выполнена интеграция многокамерной системы трекинга с платформой дополненной реальности (AR). Система трекинга обеспечивает точное отслеживание положения и ориентации в пространстве, а AR-фреймворк — наложение виртуальных объектов, соответствующих анатомическим структурам и запланированным траекториям инструментов. Данная интеграция позволяет хирургу видеть наложение виртуальных данных на реальное изображение операционного поля, что способствует более эффективному планированию и повышению точности выполнения хирургических манипуляций.
Интерфейс дополненной реальности (AR) был разработан с использованием Unity и AR Foundation для обеспечения отображения критически важной информации непосредственно в поле зрения хирурга. Данная система обеспечивает визуализацию анатомических моделей и предоперационных планов в режиме реального времени, накладывая их на изображение пациента, получаемое с камер. Разработка включала создание интуитивно понятного пользовательского интерфейса, позволяющего хирургу легко взаимодействовать с AR-отображением и настраивать параметры визуализации, такие как прозрачность, масштаб и ориентация моделей. Интеграция с системой отслеживания позволяет AR-отображению стабильно отображаться в правильном положении относительно анатомии пациента во время хирургической процедуры.
Визуализация с использованием дополненной реальности (AR) значительно повышает пространственное понимание хирургом анатомических структур и предоперационного плана. AR-интерфейс позволяет накладывать трехмерные модели и данные планирования непосредственно в поле зрения хирурга во время операции, что упрощает ориентацию и снижает вероятность ошибок. Это способствует более точной навигации инструментов, особенно в сложных анатомических областях, и обеспечивает возможность проведения хирургических процедур с повышенной точностью и эффективностью. Возможность визуального сопоставления планируемых и фактических анатомических структур в реальном времени позволяет оператору адаптировать подход и оптимизировать хирургическую стратегию непосредственно в ходе операции.
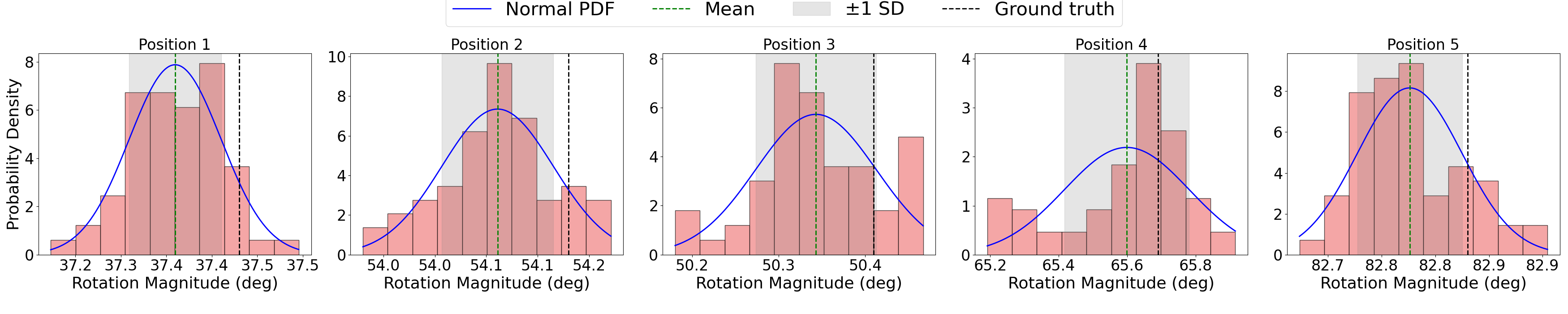
Система обеспечивает субмиллиметровую точность измерения расстояний (менее 0.1 мм) и угловую точность менее 0.1°. Результаты валидации показали, что приблизительно 33.3% измерений имеют погрешность менее 4 мм, в то время как еще 33.3% измерений находятся в диапазоне от 4 до 6 мм. Данные показатели точности обеспечивают возможность высокоточного наложения анатомических моделей и хирургических планов в режиме реального времени.
Сравнительный анализ и перспективы развития
Проведенные сравнительные исследования позволили оценить разработанную систему нейронавигации в сопоставлении с существующими решениями, использующими технологии Vuforia, HoloLens и Intel RealSense SR300. Результаты демонстрируют, что предложенная система обеспечивает конкурентоспособную, а в ряде случаев и превосходящую точность отслеживания и минимальную задержку. Это указывает на потенциал для повышения эффективности хирургических вмешательств, требующих высокой точности позиционирования инструментов, и открывает возможности для более плавного и интуитивно понятного взаимодействия хирурга с визуализируемыми данными во время операции.
Разработанная система отличается модульной конструкцией, что позволяет легко интегрировать её в существующие хирургические процессы и с разнообразными инструментами. Такая гибкость значительно расширяет сферу применения технологии, выходя за рамки первоначальных задач. Возможность адаптации к различным хирургическим рабочим процессам и совместимость с широким спектром инструментов обеспечивают бесшовную интеграцию в операционные, минимизируя необходимость внесения изменений в привычную практику. Это делает систему особенно привлекательной для хирургов, стремящихся к повышению точности и эффективности процедур, сохраняя при этом привычные методы работы.
Дальнейшая разработка системы нацелена на внедрение Байесовской фильтрации, что позволит существенно снизить уровень шума и повысить точность локализации, особенно в сложных хирургических условиях. Данный подход, основанный на вероятностном анализе, позволит эффективно объединять данные от различных сенсоров, учитывать неопределенности измерений и предсказывать наиболее вероятное положение инструментов в реальном времени. Внедрение Байесовской фильтрации позволит системе адаптироваться к изменяющимся условиям операционного поля, компенсировать помехи и обеспечивать стабильно высокую точность даже при ограниченной видимости или сложных анатомических структурах. Ожидается, что это значительно улучшит надежность и эффективность навигации, способствуя более точным и безопасным хирургическим вмешательствам.
Предлагаемая технология демонстрирует значительный потенциал для повышения точности хирургических вмешательств, что, в свою очередь, способствует снижению числа послеоперационных осложнений и улучшению результатов лечения пациентов. Повышенная точность, обеспечиваемая системой, позволяет хирургам более эффективно выполнять сложные манипуляции, минимизируя травмы окружающих тканей и сокращая время восстановления. Внедрение данной разработки открывает возможности для проведения менее инвазивных операций, что ведет к уменьшению болевых ощущений и более быстрому возвращению пациентов к полноценной жизни. Ожидается, что дальнейшее совершенствование и широкое внедрение данной технологии окажет существенное влияние на качество хирургической помощи и общую статистику здоровья населения.

Представленная работа демонстрирует стремление к математической чистоте в области нейронавигации. Система, основанная на оптических метках и дополненной реальности, позволяет достичь высокой точности при неинвазивной стимуляции мозга, при этом избегая сложностей и высокой стоимости традиционных методов. Как отмечал Джон фон Нейманн: «В науке не бывает проигрышей, бывают лишь отсроченные победы». В данном случае, отказ от дорогостоящего оборудования в пользу эффективного алгоритма обработки изображений и системы камер представляет собой именно такую отсроченную победу, обеспечивая масштабируемость и доступность технологии для более широкого круга исследователей и клиник. Акцент на точности и надежности системы, основанный на принципах компьютерного зрения, соответствует стремлению к доказуемости алгоритма, а не просто его работоспособности на тестовых данных.
Куда Ведет Эта Дорога?
Представленная система, несомненно, демонстрирует снижение стоимости и повышение доступности нейронавигации для неинвазивной стимуляции мозга. Однако, строго говоря, корректность полученных результатов зависит от точности калибровки многокамерной системы и устойчивости распознавания AprilTags при различных условиях освещения. Асимптотическое поведение алгоритма обработки изображений, особенно при увеличении количества отслеживаемых маркеров, требует дальнейшего анализа. Нельзя утверждать о полной надежности системы без строгой математической модели погрешностей и оценки их влияния на точность позиционирования.
Следующим логичным шагом представляется разработка алгоритмов, устойчивых к частичной окклюзии маркеров и дефектам изображения. Интересным представляется исследование возможности интеграции с системами машинного обучения для предсказания оптимальных параметров стимуляции на основе данных нейронавигации. Следует помнить, что простое «работает на тестах» — недостаточное условие для клинического применения; требуется доказательство корректности и предсказуемости в реальных условиях.
В конечном счете, истинная элегантность подобной системы проявится не в снижении стоимости, а в достижении абсолютной точности и воспроизводимости результатов. Лишь тогда можно будет утверждать, что разработанный подход действительно является значимым шагом вперед в области неинвазивной нейростимуляции. Иначе это лишь еще одна оптимизация, а не фундаментальное решение.
Оригинал статьи: https://arxiv.org/pdf/2601.16862.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Рынок в смятении: Снижение ставки ЦБ, волатильность рубля и новые возможности для инвесторов (25.04.2026 01:32)
- Визуальный язык: от простого к сложному
- Motorola Moto G77 ОБЗОР: отличная камера, лёгкий, чёткое изображение
- Oppo Find X9s ОБЗОР: замедленная съёмка видео, плавный интерфейс, скоростная зарядка
- Обзор Asus VivoBook 16: лучше большинства бюджетных ноутбуков.
- Искусственный интеллект, ориентированный на человека: новый подход
- Acer Aspire 5 A515-57G-53N8 ОБЗОР
- ZenBook 14 OLED UX3405CA, Ultra 7 255H ОБЗОР
- Новые смартфоны. Что купить в апреле 2026.
2026-01-26 08:57