Автор: Денис Аветисян
Новое исследование демонстрирует, как перепрофилированные человекоподобные роботы могут обеспечить полнотелесную тактильную обратную связь в виртуальной реальности, значительно повышая эффект погружения.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"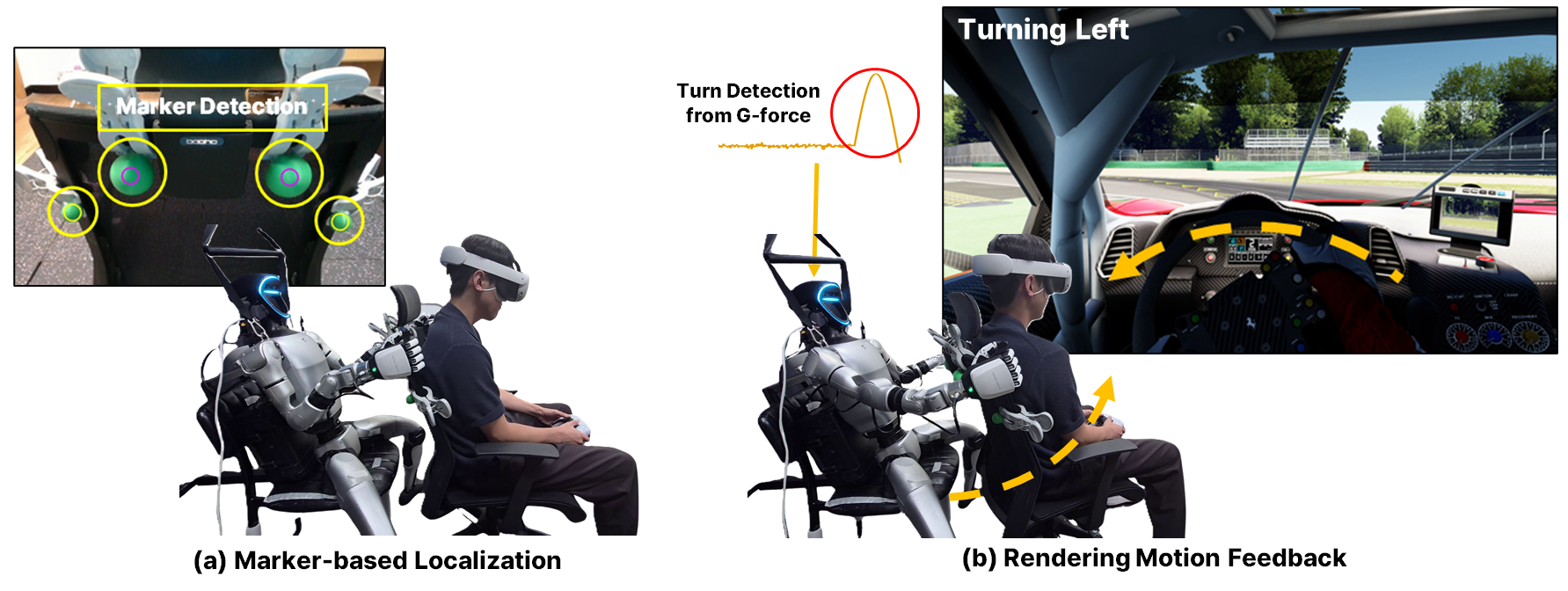
Использование человекоподобных роботов для создания более реалистичной и захватывающей тактильной обратной связи в симуляторах вождения и других VR-приложениях.
Несмотря на прогресс в области виртуальной реальности, создание реалистичной и всеобъемлющей тактильной обратной связи остается сложной задачей. В данной работе, ‘HumanoidTurk: Expanding VR Haptics with Humanoids for Driving Simulations’ рассматривается инновационный подход, использующий гуманоидных роботов для передачи движений, имитирующих перегрузки в VR-симуляторах вождения. Эксперименты показали, что добавление обратной связи от робота значительно повышает ощущение погружения и реалистичности, хотя и сопряжено с умеренными компромиссами в комфорте. Может ли этот подход открыть новую эру в разработке тактильных систем, сочетающих преимущества роботизированной точности и адаптивности человеческого взаимодействия?
Разрушая Границы Погружения в VR-Симуляторах
Современные VR-симуляторы вождения зачастую не способны достоверно передать физические ощущения, сопровождающие управление автомобилем, что значительно снижает эффект присутствия и реалистичность происходящего. Отсутствие адекватной обратной связи — будь то вибрация руля, ощущение ускорения или торможения, или даже сопротивление педалей — приводит к рассогласованию между визуальной информацией, получаемой глазом, и сигналами от вестибулярного аппарата. Этот диссонанс заставляет мозг воспринимать виртуальное окружение как нереальное, нарушая погружение и вызывая дискомфорт. В результате, пользователь не может полностью ощутить себя за рулем, что негативно сказывается на эффективности тренировок и общем впечатлении от симуляции.
Рассогласование между визуальной информацией, получаемой глазами, и сигналами от вестибулярного аппарата, отвечающего за равновесие, является распространенной причиной так называемой «симулятивной болезни» в виртуальной реальности. Этот дискомфорт, проявляющийся в тошноте, головокружении и общей дезориентации, возникает из-за того, что мозг получает противоречивые сигналы о движении. Визуально человек видит перемещение в виртуальном пространстве, однако тело остается неподвижным, что вызывает когнитивный диссонанс. В результате, продолжительное использование VR-систем становится затруднительным, а эффект полного погружения, необходимый для реалистичного опыта, существенно снижается. Преодоление этой проблемы требует разработки технологий, способных синхронизировать визуальные стимулы с физическими ощущениями, обеспечивая более целостный и правдоподобный опыт для пользователя.
Для достижения подлинного погружения в виртуальную реальность недостаточно полагаться исключительно на визуальные и слуховые ощущения. Современные исследования показывают, что полноценное восприятие виртуального мира требует активации всего тела, включая проприоцепцию, вестибулярный аппарат и тактильные ощущения. Вовлечение этих систем позволяет мозгу сформировать более целостную и правдоподобную картину происходящего, существенно повышая уровень присутствия и реализма. Разработка устройств, способных имитировать физические ощущения — от вибрации и давления до силы и температуры — представляется ключевым направлением в создании действительно убедительных и комфортных виртуальных сред, способных преодолеть разрыв между виртуальным и реальным мирами.

HumanoidTurk: Система Целостной Тактильной Обратной Связи
Система HumanoidTurk использует гуманоидного робота Unitree G1 в качестве платформы для обеспечения тактильной обратной связи по всему телу в симуляторе вождения в виртуальной реальности. Робот был адаптирован для этой цели, позволяя пользователю физически ощущать воздействия, соответствующие событиям в виртуальной среде. В отличие от традиционных тактильных устройств, ограничивающихся отдельными точками контакта, HumanoidTurk обеспечивает распределенную обратную связь по всей поверхности тела, создавая более реалистичный и погружающий опыт симуляции вождения.
Система HumanoidTurk использует технологию маркер-локализации для точного отслеживания положения пользователя в пространстве. На тело пользователя и на робота Unitree G1 устанавливаются маркеры, которые фиксируются системой захвата движения. Анализируя положение этих маркеров, система определяет координаты пользователя и соответствующим образом управляет силовыми приводами робота, создавая обратную тактильную связь, соответствующую действиям в виртуальной среде. Высокая точность маркер-локализации позволяет добиться синхронизации движений пользователя и робота, обеспечивая реалистичные ощущения от взаимодействия в симуляторе вождения.
Традиционные системы тактильной обратной связи, как правило, ограничиваются локализованной вибрацией или силами, воздействующими на отдельные части тела, например, руки или пальцы. HumanoidTurk, используя весь корпус гуманоидного робота Unitree G1, предлагает принципиально иной подход, обеспечивая тактильную стимуляцию по всему телу. Это позволяет пользователю ощущать более реалистичные и комплексные физические взаимодействия в виртуальной среде вождения, включая ощущение инерции, ускорения и столкновений, что значительно повышает степень погружения и правдоподобность симуляции по сравнению с устройствами, обеспечивающими только ограниченную тактильную отдачу.
Синтез Реалистичных Тактильных Ощущений
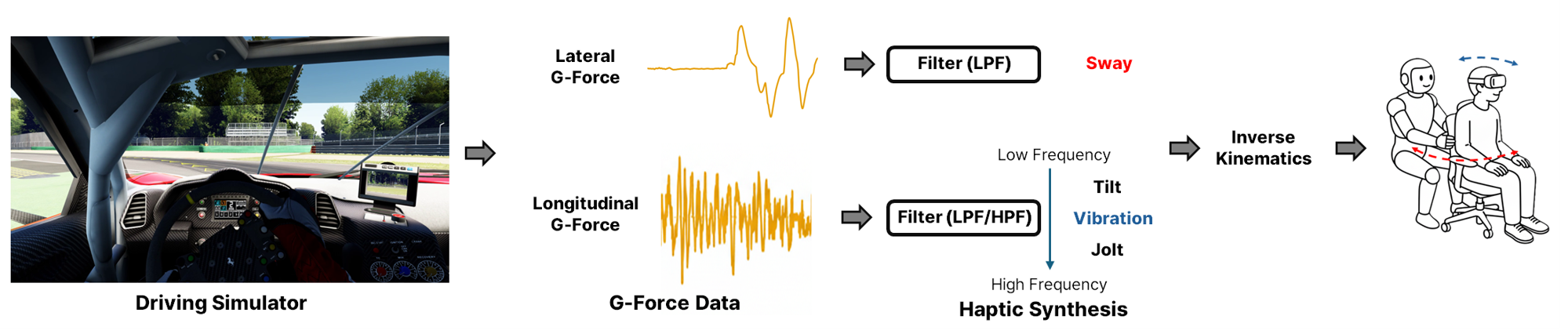
В системе HumanoidTurk для синтеза тактильных ощущений используются два различных подхода: фильтрационный и пороговый. Фильтрационный синтез основан на декомпозиции сигналов перегрузок (G-force) с использованием низкочастотных и высокочастотных фильтров, что позволяет создавать более тонкие и нюансированные ощущения. Пороговый синтез, напротив, фокусируется на ключевых событиях ускорения, обеспечивая более выраженную и оперативную обратную связь. Комбинация этих двух подходов позволяет системе HumanoidTurk генерировать широкий спектр тактильных ощущений, адаптированных к различным типам взаимодействия.
Фильтр-синтез в HumanoidTurk использует комбинацию фильтров нижних и верхних частот для декомпозиции сигналов перегрузок (G-force). Фильтр нижних частот выделяет компоненты низкочастотного спектра, обеспечивая ощущение общей массы и статической нагрузки. Фильтр верхних частот, в свою очередь, фокусируется на высокочастотных компонентах, ответственных за ощущение резких изменений и текстуры поверхности. Комбинируя выходные сигналы обоих фильтров, система способна воссоздавать сложные и детализированные тактильные ощущения, имитирующие нюансы взаимодействия с виртуальными объектами.
Пороговый синтез тактильных ощущений фокусируется на регистрации и воспроизведении ключевых событий ускорения, обеспечивая более выраженную и оперативную обратную связь. Данный метод предполагает определение пороговых значений ускорения, при превышении которых генерируется тактильный отклик. В отличие от фильтрующих методов, которые стремятся к детальной имитации всей кривой ускорения, пороговый подход акцентирует внимание на наиболее значимых моментах, таких как столкновения или резкие изменения скорости. Это позволяет создать ощущение резкости и непосредственности, особенно в ситуациях, требующих быстрого реагирования или подчеркивания динамических характеристик взаимодействия.
Для обеспечения достоверности оценки двух методов синтеза тактильных ощущений — фильтрационного и порогового — в ходе исследования была применена схема Латинского квадрата. Данный экспериментальный дизайн позволил систематически варьировать порядок представления стимулов для каждого участника, минимизируя влияние смещения, связанного с порядком следования и индивидуальными особенностями восприятия. Использование Латинского квадрата гарантировало, что каждый метод синтеза был представлен в равном количестве раз в каждой позиции последовательности, что позволило исключить систематические ошибки и получить более объективные данные для сравнительного анализа эффективности этих методов.
Влияние на Пользовательский Опыт и Универсальность Системы
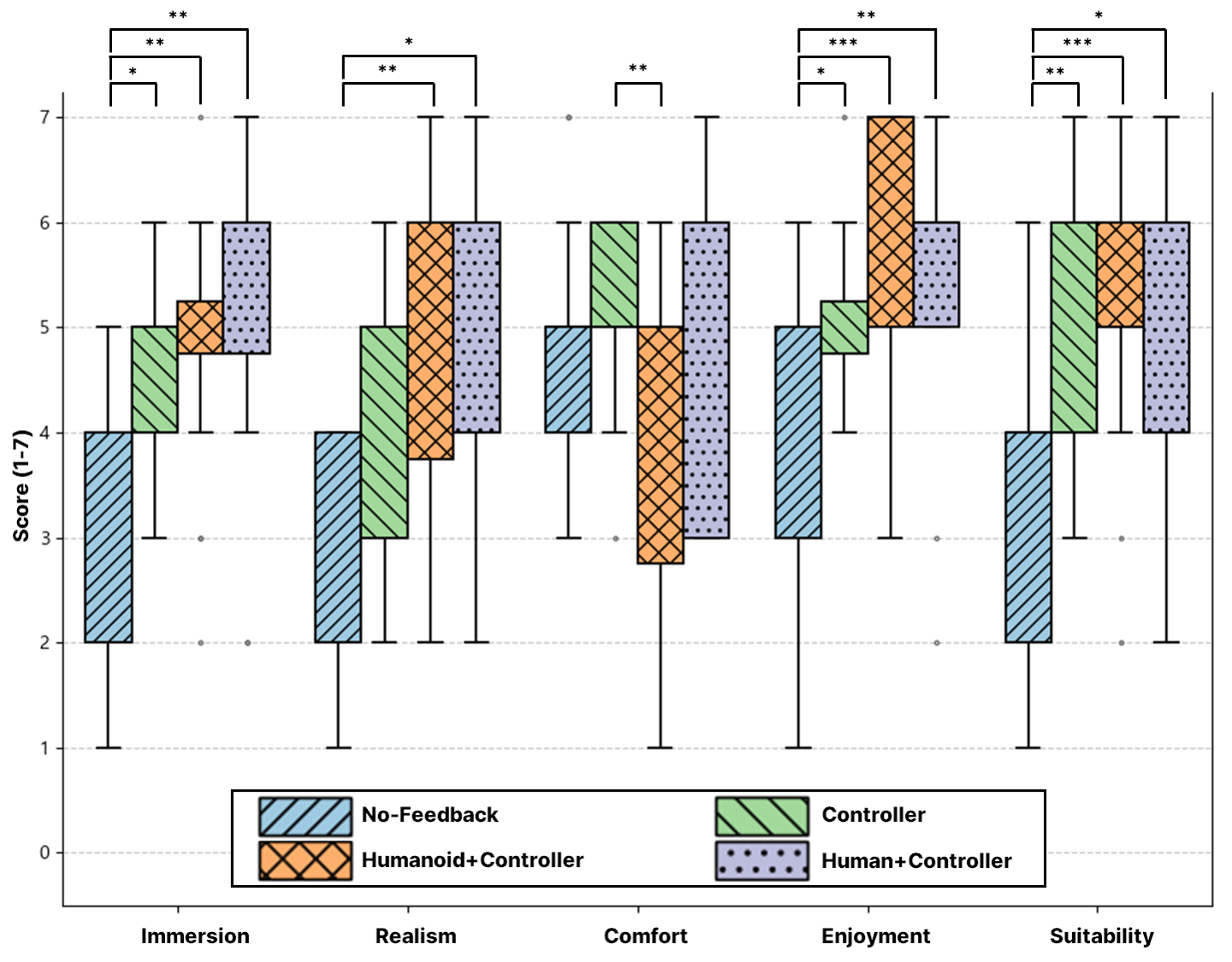
Результаты, полученные в ходе опроса User Experience Questionnaire (UEQ-S), наглядно демонстрируют значительное повышение уровня погружения и реалистичности при использовании HumanoidTurk. Исследование показало, что взаимодействие с системой, включающей как гуманоидного робота, так и контроллер, обеспечивает более глубокое вовлечение пользователя в процесс симуляции. Участники отмечали более яркие ощущения присутствия и более правдоподобное восприятие происходящего, что указывает на эффективность разработанного подхода к созданию реалистичного пользовательского опыта. Данные свидетельствуют о том, что HumanoidTurk успешно воссоздает ощущение «погружения», позволяя пользователю чувствовать себя частью виртуальной среды.
Исследования показали, что комбинация гуманоидного робота и контроллера значительно усиливает ощущение погружения и присутствия у пользователя. В частности, результаты, полученные с помощью опросника User Experience Questionnaire (UEQ-S), демонстрируют, что испытуемые в условиях «Гуманоид+Контроллер» оценивали свой опыт как более реалистичный и захватывающий, по сравнению с теми, кто использовал только контроллер или не получал обратной связи вовсе. Этот эффект указывает на то, что физическое воплощение в виде гуманоида, дополненное тактильной обратной связью, способствует более глубокому вовлечению и создает иллюзию непосредственного участия в происходящем, что особенно важно для задач, требующих высокой степени концентрации и реалистичности.
Система продемонстрировала высокую адаптивность, умело сочетая постоянную обратную связь с отзывчивой реакцией на действия пользователя, что значительно усиливало ощущение присутствия. В ходе исследований было установлено, что способность системы динамически подстраиваться под индивидуальный стиль управления позволила добиться более естественного и интуитивного взаимодействия. Такое сочетание стабильной обратной связи и адаптивности не только улучшило пользовательский опыт, но и способствовало более глубокому погружению в симуляцию, создавая иллюзию реальности и повышая эффективность обучения и тренировок. Данный подход к проектированию интерфейса «человек-робот» открывает новые возможности для создания более реалистичных и увлекательных симуляторов и расширяет сферу применения гуманоидных роботов в различных областях взаимодействия человека и робота.
Исследования показали, что, несмотря на более высокую практическую ценность управления при помощи контроллера, комбинация контроллера и человекоподобного робота обеспечила более высокий уровень гедонистического качества. Это указывает на то, что взаимодействие с системой, включающей робота, вызывает большее удовольствие и эмоциональную вовлеченность у пользователей. В то время как контроллер обеспечивает эффективное и точное управление, добавление человекоподобного робота усиливает ощущение присутствия и создает более приятный опыт взаимодействия, что может быть особенно важно для приложений, требующих высокой степени эмоциональной связи или погружения, таких как развлечения или терапия.
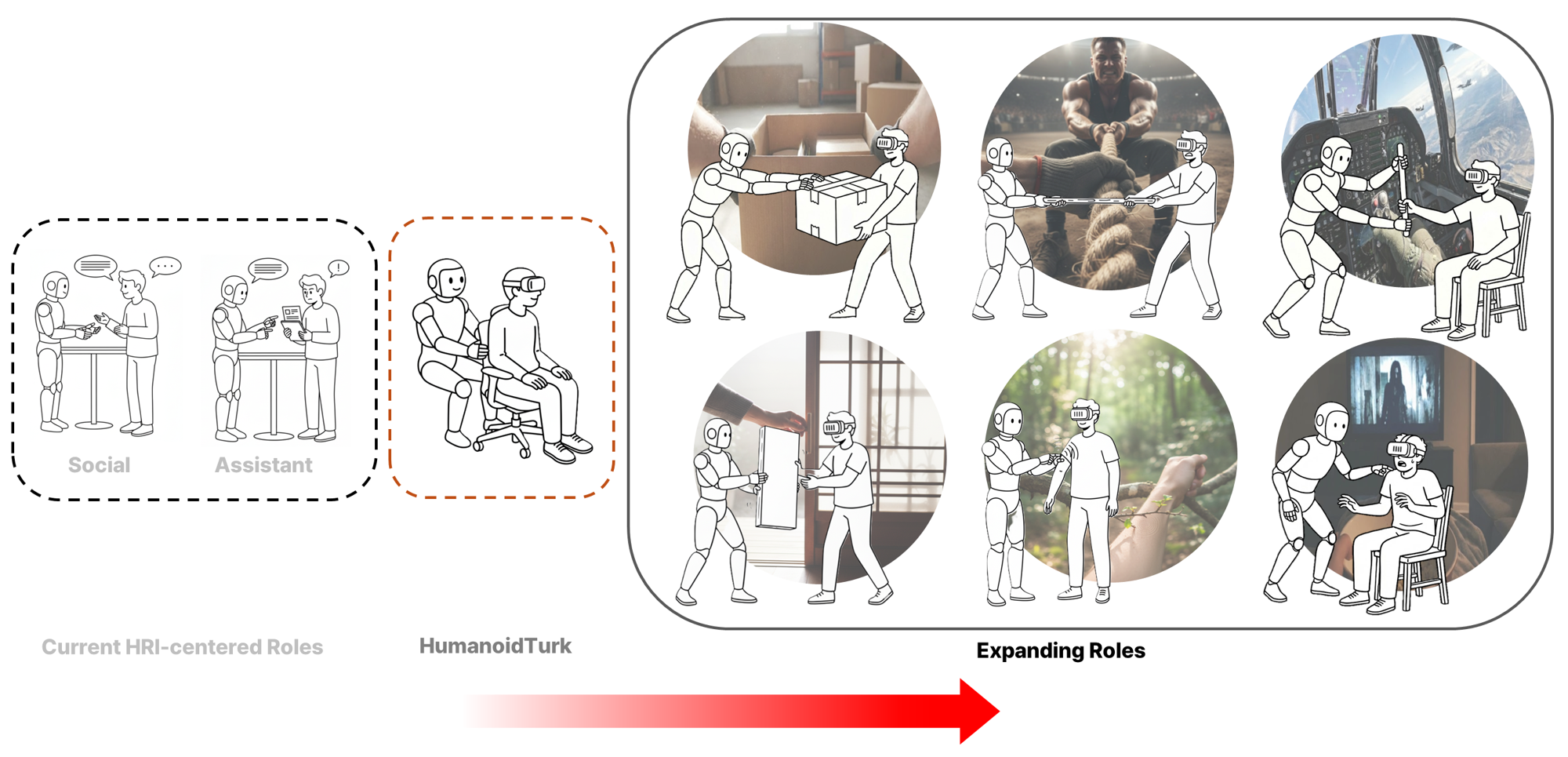
Разработанная технология, изначально протестированная в симуляторе вождения, демонстрирует значительный потенциал для более широкого применения в области взаимодействия человека и робота. Возможность адаптации и перепрограммирования гуманоидного робота для предоставления тактильной обратной связи и реализации различных сценариев взаимодействия открывает перспективы для использования в обучении, реабилитации, телеприсутствии и других сферах, где требуется интуитивно понятный и реалистичный интерфейс. Данный подход позволяет преодолеть ограничения традиционных систем управления, предлагая более естественный и захватывающий опыт взаимодействия, что делает его ценным инструментом для разработки новых поколений роботизированных систем, ориентированных на человека.
Исследование, представленное в статье, демонстрирует, что даже самые передовые системы, стремящиеся к максимальному погружению, подвержены процессу старения и требуют постоянной адаптации. Подобно тому, как любое улучшение в симуляторе, использующем гуманоидных роботов для передачи тактильных ощущений, со временем теряет свою новизну, и требуются новые решения для поддержания эффекта присутствия. В этом контексте уместно вспомнить слова Марвина Мински: «Самое важное — это не то, что мы знаем, а то, что мы можем узнать». Статья подчеркивает, что создание по-настоящему иммерсивных систем требует не только инновационных технологий, но и постоянного анализа и улучшения, учитывая неизбежный процесс «старения» даже самых совершенных решений.
Что дальше?
Представленная работа демонстрирует, что системы, стремясь к большей реалистичности, неизбежно сталкиваются с вопросом о цене этой реалистичности. Использование антропоморфных роботов для передачи тактильных ощущений в виртуальной реальности — это не просто техническое решение, но и напоминание о том, что любое усложнение системы ведет к появлению новых точек уязвимости и компромиссов. Комфорт, как и всегда, оказывается непостоянным союзником в погоне за полным погружением.
Более того, представленное исследование ставит вопрос о самой природе обратной связи. Не всегда ускорение процесса обучения — наилучший путь. Иногда системы, подобно человеку, учатся стареть достойно, и их задача — не максимизировать скорость реакции, а гармонично вписаться в течение времени. Наблюдение за тем, как система адаптируется к ограничениям, может оказаться более ценным, чем попытки насильственно преодолеть эти ограничения.
Будущие исследования, вероятно, сосредоточатся не на увеличении количества степеней свободы, а на развитии алгоритмов, позволяющих системе «дышать» вместе с энтропией. Мудрые системы не борются с неизбежным, они учатся извлекать пользу из ограничений, создавая иллюзию полного погружения, не жертвуя при этом комфортом и безопасностью. Иногда наблюдение — единственная форма участия.
Оригинал статьи: https://arxiv.org/pdf/2601.18975.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
- Новые смартфоны. Что купить в мае 2026.
- Как установить SteamOS на игровые портативные устройства ROG Ally и Legion Go под управлением Windows
- Интервью с создателями фильма «Пятая группа крови»
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
- Motorola Edge 70 Ultra ОБЗОР: современный дизайн, скоростная зарядка, огромный накопитель
- Motorola Moto G77 ОБЗОР: яркий экран, лёгкий, чёткое изображение
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
- Финальное обновление Minecraft года официально здесь — Mounts of Mayhem добавляет сражения верхом в Overworld.
2026-01-28 09:43