Автор: Денис Аветисян
Исследователи предлагают инновационный подход к обучению роботов, позволяющий им точно ощущать силу и управлять объектами с беспрецедентной ловкостью.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"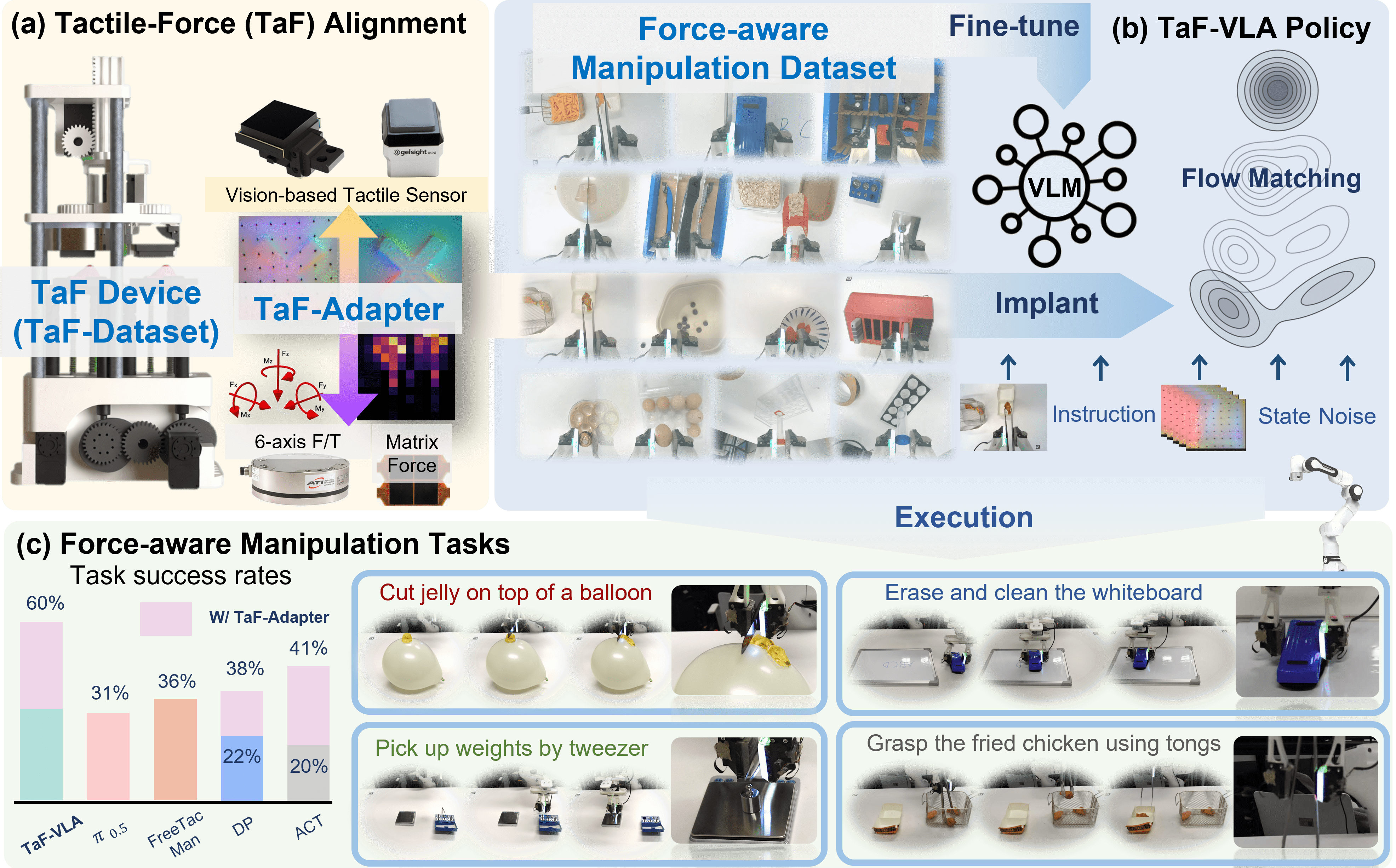
В статье представлена модель TaF-VLA, объединяющая тактильные ощущения, визуальную информацию и действия для повышения точности и надежности манипуляций роботов.
Несмотря на успехи моделей «Vision-Language-Action» (VLA) в робототехнике, их способность к точной манипуляции в задачах, требующих контроля силы, остаётся ограниченной. В работе «Tactile-Force Alignment in Vision-Language-Action Models for Force-aware Manipulation» предложен новый подход, заключающийся в установлении прямой связи между тактильными ощущениями и измеряемой силой взаимодействия. Авторы представляют TaF-VLA, фреймворк, использующий данные, полученные с помощью разработанного автоматизированного устройства, и новый адаптер, кодирующий тактильные данные в дискретные представления, отражающие динамику взаимодействия. Способно ли такое выравнивание тактильных ощущений с силой взаимодействия открыть новые горизонты в разработке роботов, способных к сложным манипуляциям с высокой точностью и надёжностью?
Понимание Тактильных Сигналалов: Основа Роботизированной Манипуляции
Традиционные методы роботизированной манипуляции часто оказываются неэффективными при выполнении деликатных задач из-за недостаточного понимания сил контакта. Вместо того, чтобы воспринимать взаимодействие с объектом как сложный процесс, основанный на тонких изменениях давления и трения, многие системы полагаются на заранее заданные траектории и грубую оценку сил. Это приводит к тому, что роботы испытывают трудности при захвате хрупких предметов, сборке сложных механизмов или выполнении операций, требующих высокой точности и аккуратности. Отсутствие нюансированного понимания сил контакта ограничивает способность роботов адаптироваться к различным формам, текстурам и весу объектов, что существенно снижает их универсальность и эффективность в реальных условиях. Разработка систем, способных воспринимать и интерпретировать тонкие изменения в силах контакта, является ключевым шагом к созданию роботов, способных выполнять сложные манипуляции с той же ловкостью и точностью, что и человек.
Эффективное тактильное восприятие у роботов требует согласования визуальной информации с данными о силе, однако достижение этой синхронизации представляет собой значительную проблему. Сложность заключается в том, что визуальные данные предоставляют информацию о форме и положении объекта, в то время как тактильные датчики регистрируют силу и распределение давления в точке контакта. Для успешного манипулирования объектами робот должен не только «видеть» предмет, но и «чувствовать» его, мгновенно сопоставляя визуальные признаки с тактильными ощущениями. Несоответствие между этими двумя модальностями может привести к неустойчивому захвату, повреждению объекта или полной неудаче манипуляции. Поэтому разработка алгоритмов, способных эффективно интегрировать и интерпретировать визуальную и тактильную информацию, является ключевой задачей в области робототехники и искусственного интеллекта, открывающей путь к более гибким и адаптивным роботам.
Роботы, лишенные глубокого понимания динамики контакта, испытывают серьезные трудности с обобщением навыков манипулирования для различных объектов и условий. В отличие от человека, способного интуитивно адаптироваться к изменениям в текстуре, форме или весе предмета, роботы часто демонстрируют хрупкость и неспособность к коррекции действий в реальном времени. Это связано с тем, что стандартные алгоритмы управления, как правило, ориентированы на заранее заданные траектории и не учитывают сложные взаимодействия между роботом и окружающей средой. Недостаточное понимание сил трения, упругости и других контактных параметров приводит к неустойчивости захвата, повреждению объектов или полному провалу манипуляции. Таким образом, развитие алгоритмов, способных моделировать и предсказывать контактные взаимодействия, является ключевым фактором для создания действительно универсальных и надежных роботизированных систем.
TaF-VLA: Единый Фреймворк для Согласования Тактильных и Силовых Сигналов
TaF-VLA представляет собой модель, основанную на предварительно обученной архитектуре Vision-Language-Action (VLA). Использование VLA в качестве основы позволяет эффективно использовать существующие знания, полученные при обучении на больших мультимодальных наборах данных. Это значительно сокращает потребность в больших объемах специализированных данных для обучения модели восприятию тактильных ощущений и сил, а также ускоряет процесс сходимости. Предварительное обучение VLA обеспечивает базовое понимание взаимосвязей между визуальной информацией, языковым описанием и действиями, что позволяет TaF-VLA более эффективно интегрировать тактильные данные и прогнозировать соответствующие силы.
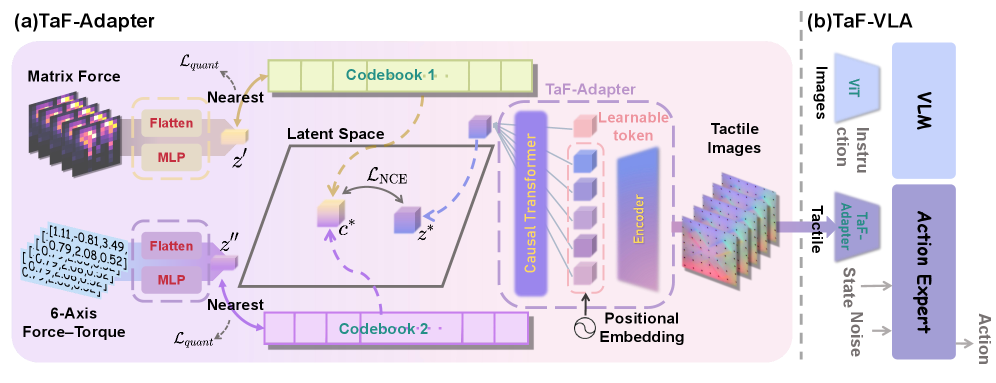
В основе TaF-VLA лежит TaF-Adapter — нейронный энкодер, предназначенный для сопоставления визуально-тактильных наблюдений с эталонными сигналами силы в общем латентном пространстве. TaF-Adapter принимает на вход данные, полученные с тактильных сенсоров и визуальные данные, и преобразует их в векторные представления. Эти представления затем сопоставляются с векторными представлениями измеренных значений силы, что позволяет модели установить связь между тактильными ощущениями, визуальной информацией и приложенной силой. Использование общего латентного пространства обеспечивает эффективное представление данных и позволяет модели обобщать информацию о контактах и силах.
Выравнивание тактильных и силовых представлений в TaF-VLA достигается посредством контрастивного обучения. Данный подход максимизирует сходство между векторами признаков, полученными из тактильных наблюдений и соответствующих значений силы. В процессе обучения модель стремится уменьшить расстояние между положительными парами (тактильные данные и соответствующие силовые сигналы) и увеличить расстояние между отрицательными парами (тактильные данные и несоответствующие силовые сигналы). Функция потерь, используемая в контрастивном обучении, обычно основана на L = \sum_{i=1}^{N} l(f(x_i), y_i), где x_i — тактильные данные, y_i — соответствующая сила, а f — функция отображения в пространство признаков. Эффективность контрастивного обучения заключается в его способности выявлять общие закономерности и зависимости между тактильными ощущениями и приложенной силой, что позволяет модели обобщать полученные знания и точно прогнозировать силу на основе тактильных данных.
Встраивание тактильных и силовых данных в общее латентное пространство позволяет модели TaF-VLA формировать комплексное представление о динамике контакта. Это достигается путем сопоставления признаков, извлеченных из тактильных наблюдений, с соответствующими сигналами силы реакции, что позволяет модели устанавливать взаимосвязи между сенсорными данными и приложенными силами. В результате модель получает возможность прогнозировать силовые взаимодействия на основе тактильной информации и наоборот, обеспечивая более точное понимание и управление контактными взаимодействиями. Общее латентное пространство служит унифицированным представлением данных, облегчая обобщение и адаптацию модели к различным сценариям и условиям контакта.
Набор Данных и Обучение Модели
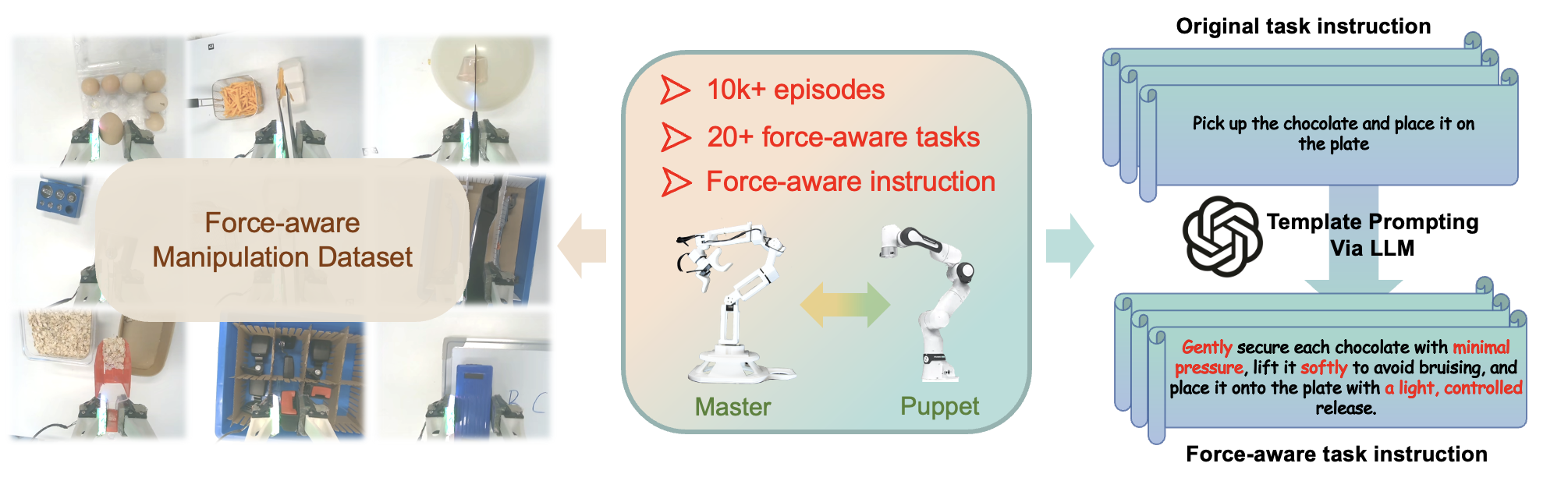
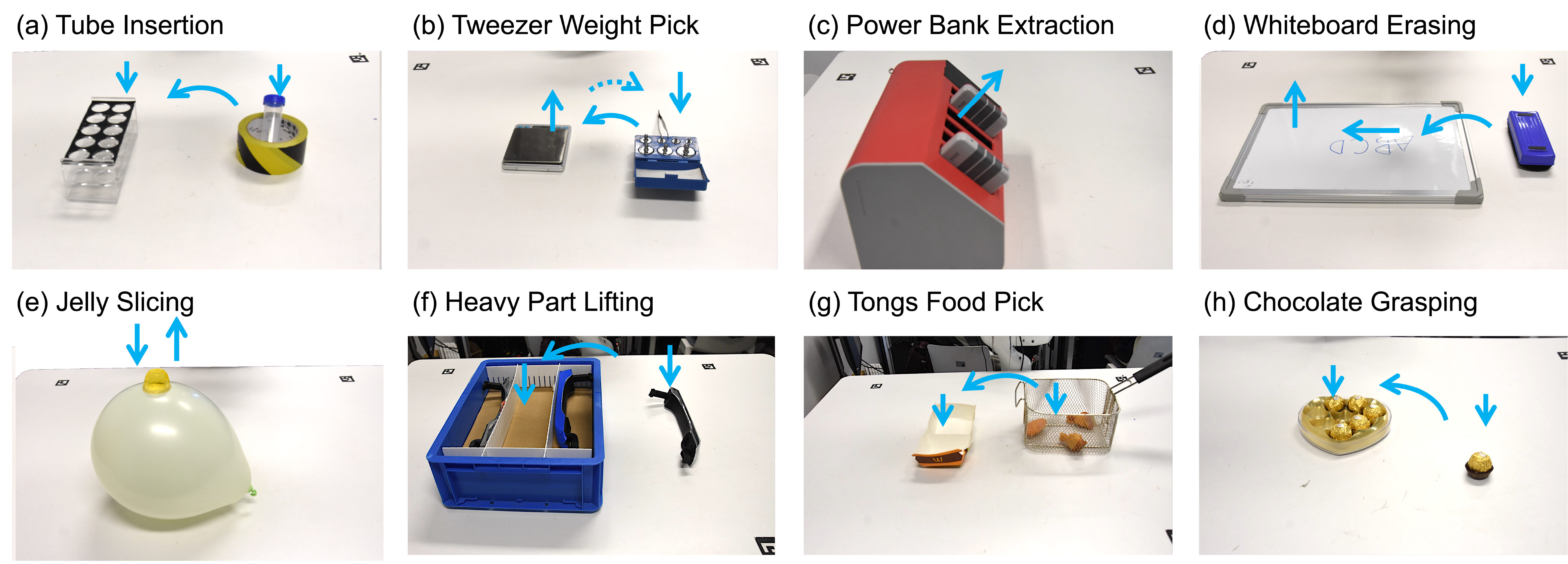
Для создания масштабного набора данных TaF-Dataset использовалась автоматизированная система сбора данных и робот-манипулятор Franka Research 3. Система включала в себя синхронизированный захват визуальной и тактильной информации, а также измерение силы и момента, приложенных к объектам. Робот Franka Research 3 выполнял различные манипуляции с объектами, генерируя данные, которые затем использовались для обучения моделей. Автоматизация процесса сбора данных позволила получить более чем 10 миллионов синхронизированных кадров, что значительно превышает объемы данных, доступные в ранее существовавших наборах данных для задач манипулирования.
Набор данных TaF-Dataset состоит из более чем 10 миллионов синхронизированных кадров, включающих визуальные изображения, данные о силе и моменте (force/torque) и карты давления. Эта мультимодальная структура обеспечивает комплексное представление взаимодействия, позволяя модели одновременно анализировать визуальную информацию, тактильные ощущения и приложенные силы. Синхронизация данных гарантирует точную корреляцию между различными модальностями, что критически важно для обучения моделей, способных к эффективной интерпретации динамических взаимодействий с объектами.
Для эффективного представления данных в общем латентном пространстве используется дискретная векторизация (Discrete Vector Quantization, DVQ). DVQ позволяет сжать многомерные данные, представляя их в виде дискретных векторов, что значительно снижает вычислительную сложность и объем памяти, необходимых для обучения модели. Этот подход создает компактное представление данных, сохраняя при этом ключевую информацию, необходимую для последующей обработки и анализа. Использование DVQ способствует более быстрой сходимости обучения и повышает обобщающую способность модели, особенно при работе с большими объемами данных, такими как содержащиеся в TaF-Dataset.
Использование временного контекста в процессе обучения позволяет модели более точно интерпретировать динамические взаимодействия. Вместо анализа отдельных кадров, модель обучается учитывать последовательность данных, что позволяет ей понимать изменения в силе, крутящем моменте и тактильных ощущениях во времени. Это достигается путем подачи в модель последовательностей данных, а не отдельных, изолированных кадров, что позволяет ей изучать зависимости между предыдущими и текущими состояниями взаимодействия. Такой подход значительно повышает точность прогнозирования и улучшает способность модели к обобщению на новые, ранее не встречавшиеся динамические сценарии взаимодействия с объектами.
За Пределами Текущих Возможностей: Будущие Направления
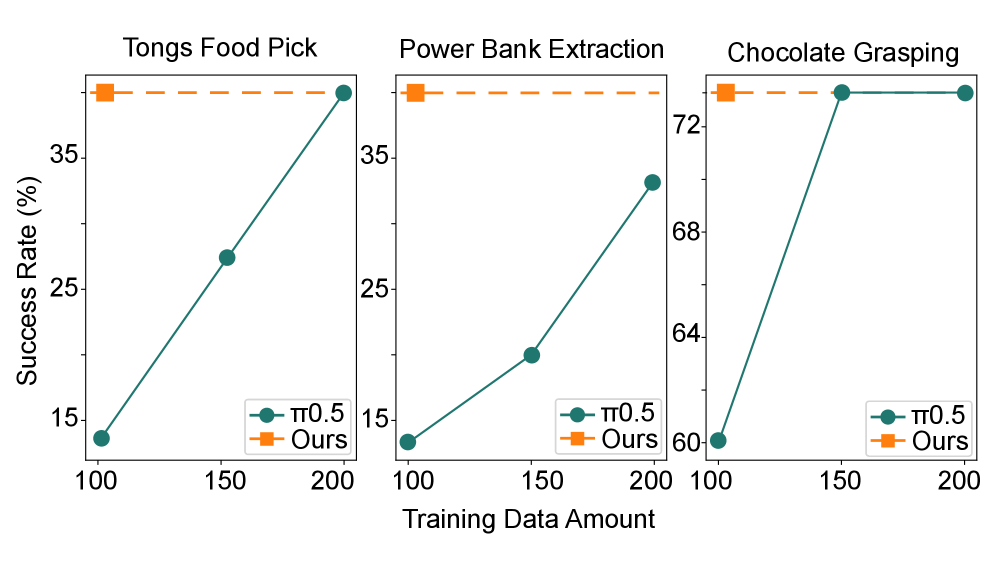
Разработанная технология TaF-VLA демонстрирует значительный прорыв в области робототехники, позволяя роботам выполнять сложные манипуляционные задачи с повышенной точностью и адаптивностью. В ходе испытаний модель показала средний уровень успешности в 64.8%, что существенно превосходит показатели предыдущих поколений робототехнических систем. Эта способность к точному управлению и приспособлению к изменяющимся условиям открывает перспективы для автоматизации широкого спектра задач, требующих деликатности и координации, от сборки сложных механизмов до выполнения хирургических операций и взаимодействия с человеком в реальном времени. Повышенная надежность и эффективность, достигнутые благодаря TaF-VLA, представляют собой важный шаг на пути к созданию более универсальных и полезных роботов.
Способность модели TaF-VLA рассуждать о силах контакта открывает принципиально новые горизонты для применения робототехники в различных областях. В частности, это позволяет создавать роботов, способных выполнять сложные сборочные операции с высокой точностью, адаптируясь к незначительным отклонениям и неопределенностям. Перспективы в хирургии также значительны, поскольку роботы, понимающие взаимодействие сил, могут ассистировать хирургам, обеспечивая большую деликатность и контроль при выполнении тонких манипуляций. Не менее важным является потенциал в области взаимодействия человека и робота, где понимание сил контакта необходимо для создания безопасных и интуитивно понятных систем, способных эффективно сотрудничать с людьми в различных задачах, например, при помощи или реабилитации.
Интеграция больших языковых моделей (LLM) открывает перспективные возможности для создания системы, способной генерировать инструкции, учитывающие не только последовательность действий, но и необходимые усилия и контактные силы. Вместо простых команд, таких как «поднять объект», LLM сможет сформулировать указания, учитывающие вес, текстуру и хрупкость объекта, например, «аккуратно поднимите вазу, прикладывая минимальное усилие, чтобы избежать повреждений». Такой подход позволит роботам более эффективно планировать сложные манипуляции, адаптироваться к различным условиям и взаимодействовать с объектами, требующими деликатного обращения, значительно повышая успешность выполнения задач и расширяя спектр возможных применений в сферах сборки, хирургии и человеко-роботного взаимодействия.
Для дальнейшего повышения эффективности и надежности TaF-VLA, планируется существенное расширение обучающего набора данных. Это предполагает включение большего разнообразия объектов — от простых бытовых предметов до сложных промышленных деталей — и сценариев взаимодействия с окружающей средой, включая различные текстуры поверхностей и условия освещения. Такой подход позволит модели лучше обобщать полученные знания и адаптироваться к новым, ранее не встречавшимся ситуациям, значительно повышая ее устойчивость к изменениям и обеспечивая более точное выполнение задач в реальных условиях. Увеличение вариативности данных критически важно для преодоления ограничений, связанных с узкой специализацией, и создания действительно универсального робота-манипулятора.
Исследование демонстрирует, что для создания действительно адаптивных систем манипулирования необходимо учитывать не только визуальную и языковую информацию, но и тактильные ощущения, напрямую связанные с приложенной силой. Подобный подход позволяет роботу не просто ‘видеть’ объект, но и ‘чувствовать’ его, что критически важно для выполнения сложных задач, требующих точной регулировки силы. Всё это напоминает о словах Клода Шеннона: «Лучший способ передать сообщение — это сделать его максимально простым и понятным». TaF-VLA, выстраивая прямую связь между тактильными данными и фактической силой, стремится к той же простоте и понятности, позволяя роботу действовать более эффективно и предсказуемо. Ведь, как известно, любая зависимость от сложной модели — это обещание, данное прошлому, а будущее принадлежит системам, способным адаптироваться к новым условиям.
Что дальше?
Представленная работа, безусловно, расширяет границы восприятия в моделях «Видение-Язык-Действие». Однако, попытка «выровнять» тактильные ощущения с силой — это не решение, а лишь переформулировка проблемы. Сила, в конечном счёте, — это лишь следствие взаимодействия, а не сущность. Более глубокое понимание потребует отказа от поиска прямой корреляции и признания хаоса как естественного языка природы. Гарантий стабильности здесь не будет, лишь более эффективное кэширование иллюзий.
Перспективы лежат не в усложнении моделей, а в переходе к более гибким, самоорганизующимся системам. Следующим шагом видится не столько «обучение» роботов манипулированию, сколько создание условий для их «выращивания» в среде, где ошибка — это не сбой, а сигнал к адаптации. Предлагаемый подход — это инструмент, но экосистема требует иного взгляда.
Вероятно, истинный прогресс в области роботизированных манипуляций будет достигнут не через накопление данных и увеличение вычислительной мощности, а через принятие неопределённости как фундаментальной характеристики реальности. Стабильность — это миф, и попытка её достижения — это лишь отсрочка неизбежного. Задача состоит не в её создании, а в эффективном управлении её отсутствием.
Оригинал статьи: https://arxiv.org/pdf/2601.20321.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
- Как установить SteamOS на игровые портативные устройства ROG Ally и Legion Go под управлением Windows
- Интервью с создателями фильма «Пятая группа крови»
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
- Motorola Edge 70 Ultra ОБЗОР: современный дизайн, скоростная зарядка, огромный накопитель
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
- Motorola Moto G77 ОБЗОР: яркий экран, лёгкий, чёткое изображение
- Финальное обновление Minecraft года официально здесь — Mounts of Mayhem добавляет сражения верхом в Overworld.
- Обзор Moto G Stylus 5G (2024)
2026-01-29 09:26