Автор: Денис Аветисян
Исследователи представили Thinker — масштабную модель, объединяющую зрение и язык для управления роботами и понимания окружающего мира.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"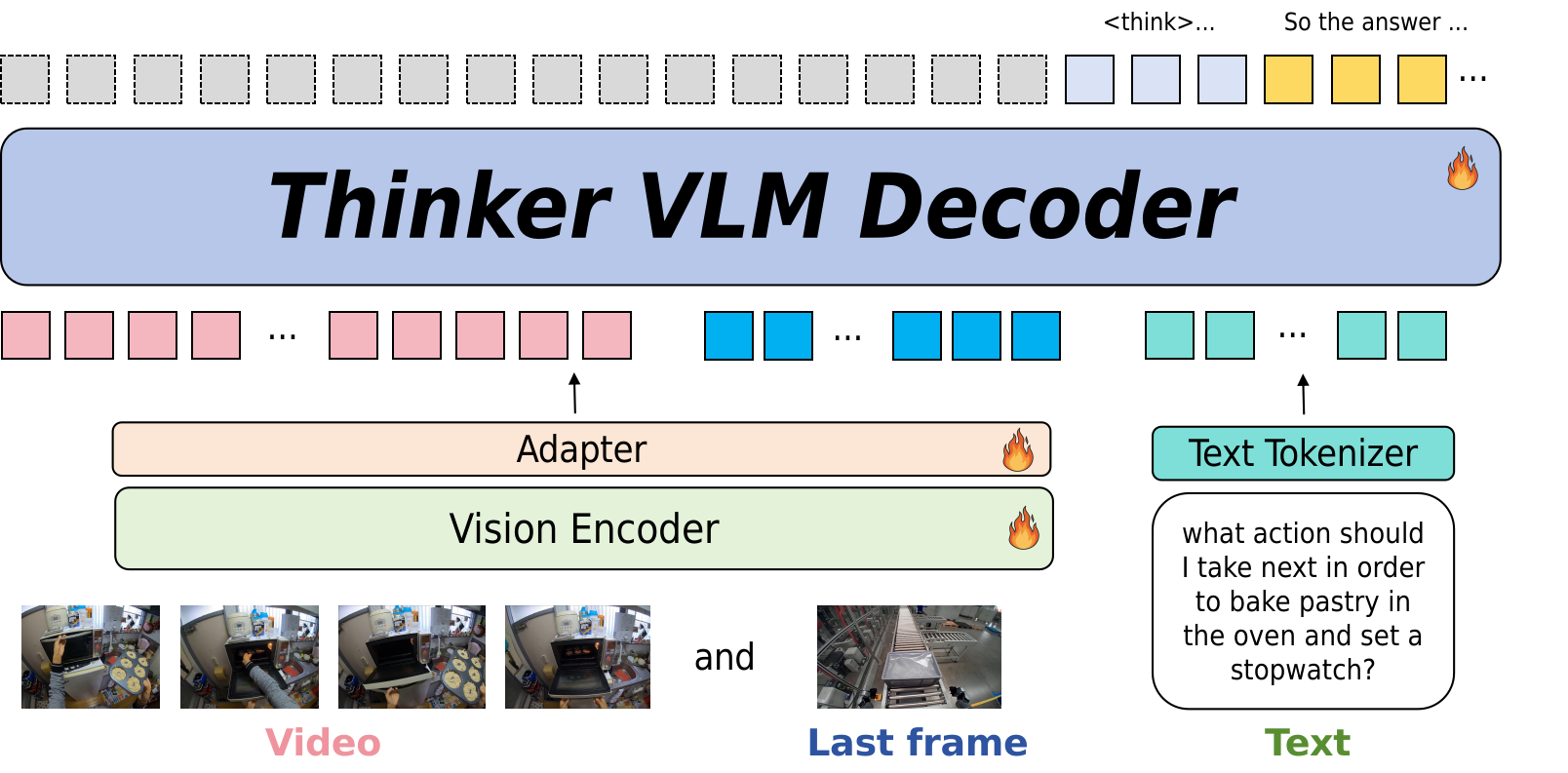
Thinker — это большая языковая модель, разработанная специально для робототехники, демонстрирующая передовые результаты в задачах, требующих пространственно-временного рассуждения и обработки информации из первого лица.
Несмотря на успехи больших мультимодальных моделей, робототехнические задачи часто вызывают затруднения даже у современных систем, особенно в понимании перспективы и временных зависимостей. В данной работе представлена модель ‘Thinker: A vision-language foundation model for embodied intelligence’, разработанная специально для воплощенного интеллекта и решающая указанные проблемы посредством обучения на масштабном наборе данных, включающем видео от первого лица и данные для пространственного рассуждения. Предложенный подход, совмещающий анализ ключевых кадров и полных видеопоследовательностей, позволил достичь передовых результатов на стандартных бенчмарках планирования задач. Сможет ли Thinker стать основой для создания действительно автономных и сообразительных роботов?
Понимание системы: вызовы роботизированного мышления
Традиционные большие языковые модели, работающие с визуальной информацией, демонстрируют впечатляющие результаты в таких задачах, как автоматическое описание изображений и ответы на вопросы по визуальному контенту. Однако, когда дело доходит до робототехники, их возможности оказываются ограниченными. В отличие от простого распознавания объектов или предоставления ответов на конкретные вопросы, управление роботом требует последовательного, многошагового планирования и выполнения действий. Это подразумевает не только понимание того, что видно на изображении, но и способность определить как выполнить определенную задачу, учитывая последовательность действий и их влияние друг на друга. Подобный вид комплексного, последовательного рассуждения представляет значительную трудность для существующих моделей, которые, как правило, не способны эффективно справляться с динамичными, реальными условиями, требующими адаптации и прогнозирования.
Робототехника предъявляет значительно более высокие требования к искусственному интеллекту, чем простое распознавание образов. Для успешного функционирования в реальном мире роботам необходимо не только видеть и понимать окружающую обстановку, но и планировать последовательность действий для достижения поставленной цели — это и есть планирование задач. Кроме того, критически важным является понимание пространственных взаимосвязей между объектами и умение ориентироваться в трехмерном пространстве. Наконец, роботы должны учитывать временную последовательность событий и понимать, как их действия повлияют на ситуацию в будущем. Без интеграции этих трех ключевых элементов — планирования, пространственного и временного понимания — роботы остаются неспособными к автономному и эффективному выполнению сложных задач в динамичной среде.
Современные модели машинного обучения испытывают трудности с надежным определением местоположения и идентификацией объектов в реальном времени, что известно как «заземление объектов» (Object Grounding). Эта проблема усугубляется отсутствием способности рассуждать с точки зрения «я» (Ego-View Reasoning) — то есть, понимать окружающий мир, как если бы модель сама находилась в нем и действовала. Неспособность надежно привязать объекты к конкретным координатам и предвидеть последствия действий с их учетом существенно ограничивает эффективность этих моделей в робототехнике. В результате, роботы, управляемые такими системами, часто сталкиваются с трудностями при выполнении даже относительно простых задач, требующих точной ориентации в пространстве и взаимодействии с объектами.
Thinker: Фундамент для роботизированного интеллекта
Thinker представляет собой новую базовую модель, разработанную для преодоления разрыва между восприятием и действием в роботизированных системах. В основе Thinker лежит Thinker Base Model, служащая фундаментом для обучения и адаптации к различным задачам. В отличие от традиционных подходов, Thinker ориентирован на создание единой модели, способной одновременно обрабатывать сенсорную информацию и генерировать управляющие сигналы для робота, что позволяет создавать более гибкие и эффективные роботизированные системы, способные к автономной работе в сложных условиях.
Ключевой особенностью Thinker является двухэтапная стратегия обучения. На первом этапе модель формирует базовые возможности, используя разнообразные наборы данных для освоения общих принципов восприятия и планирования. Этот этап направлен на создание прочной основы для последующей специализации. На втором этапе происходит тонкая настройка (fine-tuning) модели для конкретных задач робототехники, что позволяет оптимизировать ее производительность в реальных условиях и повысить эффективность выполнения целевых действий. Такой подход позволяет избежать переобучения на специфических задачах и обеспечивает лучшую обобщающую способность модели.
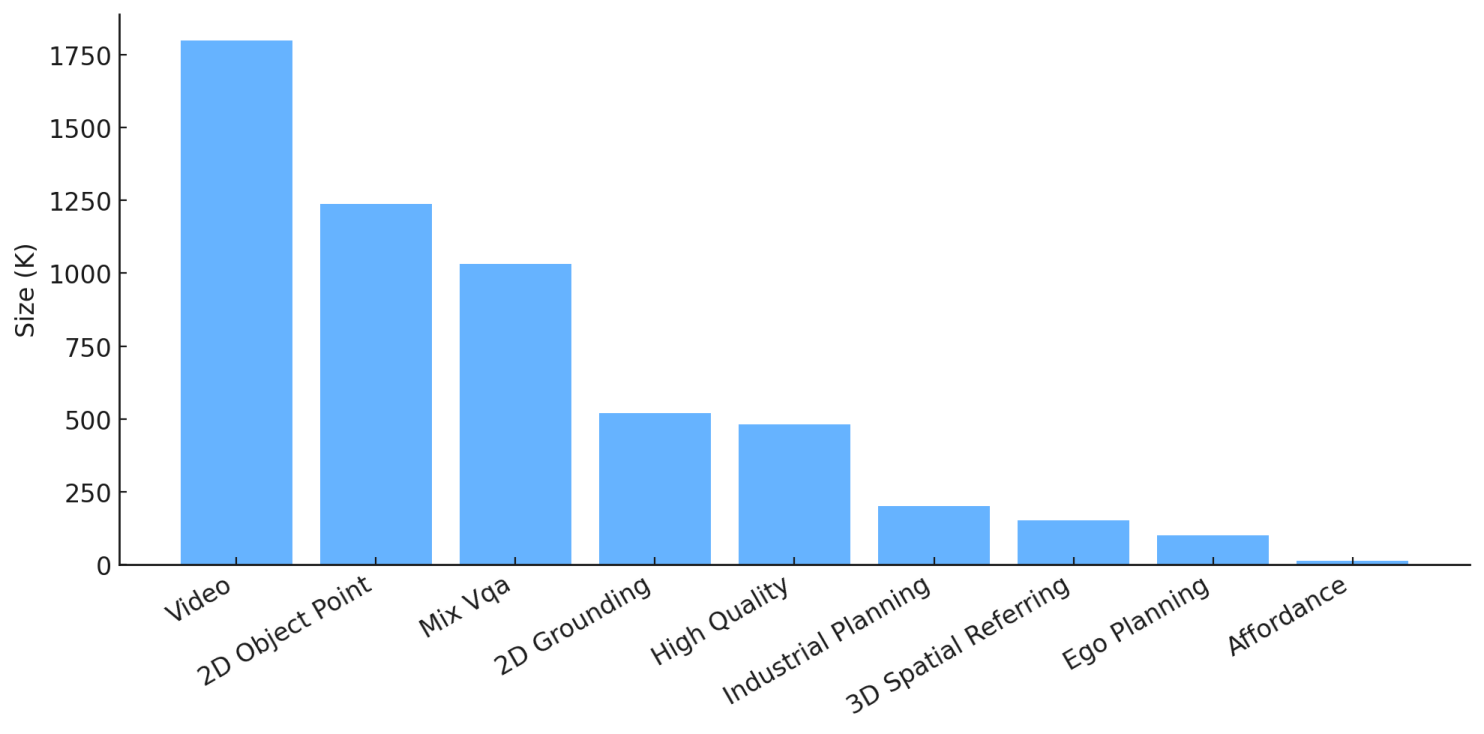
Обучение модели Thinker осуществляется на базе многозадачной инфраструктуры, использующей разнообразные наборы данных для повышения обобщающей способности. В процессе обучения используются Robovideo-1.8M (1.8 миллиона видеороликов), Industroplan-200K (200 тысяч промышленных планов), Lvis-520K (520 тысяч изображений с аннотациями объектов), Sharerobot-affordance-6.5K (6.5 тысяч примеров действий с объектами), Robopoint-667K (667 тысяч 3D-точек), Pixmopoint-570K (570 тысяч пар изображений и 3D-точек) и Egoplan-it-100K (100 тысяч примеров планирования действий от первого лица). Использование широкого спектра данных позволяет модели эффективно решать различные задачи, связанные с восприятием и управлением роботами.
В отличие от многих моделей, ориентированных исключительно на понимание данных, Thinker разработан для непосредственного выполнения задач в реальных условиях. Это достигается за счет архитектуры, нацеленной на преобразование восприятия в действие, что позволяет роботу не только интерпретировать окружение, но и эффективно взаимодействовать с ним. Практическая реализация обеспечивается благодаря обучению на разнообразных наборах данных, включающих видеозаписи и данные о манипуляциях, что позволяет Thinker демонстрировать устойчивую производительность в широком спектре роботизированных сценариев, включая промышленные и бытовые приложения.
Подтверждение эффективности Thinker: Результаты на ключевых бенчмарках
Модель Thinker продемонстрировала высокие результаты на бенчмарке Robovqa, достигнув среднего значения BLEU 63.5. Это превосходит результат ближайшего конкурента на 0.8 пункта. В частности, значения BLEU для различных порядков n-грамм составили: BLEU-1 — 72.7, BLEU-2 — 65.7, BLEU-3 — 59.5 и BLEU-4 — 56.0. Данные показатели свидетельствуют о способности модели генерировать точные и релевантные ответы в задачах, оцениваемых данным бенчмарком.
При оценке модели Thinker на бенчмарке Robovqa были получены следующие результаты по метрике BLEU: BLEU-1 составил 72.7, BLEU-2 — 65.7, BLEU-3 — 59.5, а BLEU-4 — 56.0. Эти показатели демонстрируют способность модели генерировать последовательности, близкие к эталонным, на различных уровнях n-грамм, что свидетельствует о качественной языковой модели и способности к точному воспроизведению инструкций в контексте робототехники.
Модель Thinker демонстрирует высокую точность Top-1, достигающую 58.2% на бенчмарке Egoplan-bench2. Этот результат подтверждает способность модели к точному планированию и выполнению эгоцентричных задач, то есть задач, выполняемых от первого лица, как если бы робот «видел» мир своими глазами. Бенчмарк Egoplan-bench2 предназначен для оценки навыков роботов в планировании действий в реалистичных бытовых сценариях, требующих понимания визуальной информации и координации движений.
Проведенная всесторонняя оценка Thinker на разнообразных наборах данных подтверждает его устойчивость и обобщающую способность в сложных роботизированных сценариях. Тестирование охватывало широкий спектр условий и задач, демонстрируя способность модели эффективно функционировать за пределами конкретных обучающих данных. Результаты показывают, что Thinker способен адаптироваться к новым ситуациям и успешно выполнять поставленные задачи даже в условиях неполной информации или изменяющейся обстановки, что является ключевым показателем его надежности и применимости в реальных роботизированных системах.
Надежность и перспективы: Влияние Thinker на развитие робототехники
В структуру Thinker интегрированы системы отказоустойчивости и мониторинга, что обеспечивает стабильную и надежную работу в реальных условиях эксплуатации. Данные системы непрерывно отслеживают ключевые параметры функционирования модели, выявляя и компенсируя потенциальные сбои или отклонения от нормы. Это достигается за счет резервирования критически важных компонентов и автоматического переключения на запасные ресурсы в случае обнаружения проблем. Благодаря такой архитектуре Thinker способен поддерживать работоспособность даже при частичном выходе из строя оборудования или программного обеспечения, что крайне важно для применения в автономных робототехнических системах и других критически важных приложениях, где перебои в работе недопустимы.
Достижения в рамках проекта Thinker открывают новые горизонты в таких областях, как автономная навигация, роботизированные манипуляции и взаимодействие человека с роботами. Развитая способность модели к рассуждению позволяет создавать роботов, способных самостоятельно ориентироваться в сложных средах, выполнять тонкие и точные операции с объектами, а также эффективно взаимодействовать с людьми посредством естественного и интуитивно понятного интерфейса. Эти улучшения не только расширяют возможности автоматизации, но и позволяют создавать роботов, способных к адаптации и обучению в реальном времени, что делает их незаменимыми помощниками в различных сферах — от логистики и производства до здравоохранения и освоения новых территорий.
Способность модели рассуждать о времени и пространстве делает её ключевым компонентом в разработке следующего поколения интеллектуальных роботов. В отличие от существующих систем, полагающихся на заранее запрограммированные сценарии или реакцию на непосредственные сенсорные данные, Thinker способен предвидеть последствия действий во времени и пространстве, планировать сложные последовательности движений и адаптироваться к динамично меняющимся условиям окружающей среды. Это позволяет роботам не просто выполнять отдельные задачи, но и понимать контекст, прогнозировать будущие события и принимать обоснованные решения, что критически важно для работы в сложных и непредсказуемых реальных условиях, таких как автономная навигация в городских условиях или выполнение деликатных манипуляций с объектами в процессе взаимодействия с человеком. В конечном итоге, данная способность открывает путь к созданию действительно автономных и интеллектуальных роботов, способных решать широкий спектр задач без постоянного вмешательства человека.
Предстоящие исследования направлены на расширение возможностей Thinker и изучение его потенциала в решении ещё более сложных задач, связанных с робототехникой. Особое внимание будет уделено масштабированию модели для обработки больших объемов данных и адаптации к разнообразным, динамично меняющимся условиям реального мира. Планируется углубленное изучение алгоритмов обучения с подкреплением и нейроэволюции, что позволит Thinker самостоятельно осваивать новые навыки и оптимизировать свою производительность в задачах, требующих высокого уровня координации и принятия решений, таких как сложные манипуляции с объектами и навигация в неизвестных средах. В перспективе, это позволит создать роботов, способных к более автономной и эффективной работе в широком спектре приложений.
Исследование, представленное в статье, демонстрирует, что создание эффективных систем воплощенного интеллекта требует не просто обработки визуальной информации, но и глубокого понимания пространственно-временных зависимостей. Как отмечал Дэвид Марр: «Представление мира должно быть таким, чтобы его можно было использовать». Это особенно актуально для робототехники, где способность планировать действия в динамичной среде критически важна. Модель Thinker, акцентируя внимание на эгоцентричном восприятии и масштабных данных, подтверждает эту идею, позволяя роботам более эффективно ориентироваться и взаимодействовать с окружающим миром. Каждое отклонение от ожидаемого поведения, каждое «выброс» данных, становится возможностью для выявления скрытых закономерностей и улучшения способности системы к адаптации.
Куда же дальше?
Представленная работа, безусловно, демонстрирует впечатляющий прогресс в области создания моделей, способных к воплощенному интеллекту. Однако, за внешней эффектностью результатов скрывается неизбежная ограниченность любого подхода, основанного на больших данных. Замечательно, что модель овладела навыками пространственно-временного рассуждения, но насколько глубоко это понимание? Способность коррелировать визуальные данные с языковыми командами — это лишь имитация интеллекта, а не его истинное проявление. Необходимо помнить, что реальный мир полон неопределенности и шумов, которые неизбежно искажают поступающую информацию.
Будущие исследования, вероятно, будут направлены на преодоление этих ограничений. Важно сместить акцент с простого увеличения масштаба моделей на разработку алгоритмов, способных к активному обучению и самосовершенствованию в интерактивной среде. Крайне важно также учитывать контекст и намерение действий, а не просто реагировать на отдельные команды. Игнорирование этих аспектов приведет лишь к созданию все более сложных, но все еще поверхностных систем.
Настоящий вызов заключается не в том, чтобы научить робота выполнять заданные действия, а в том, чтобы создать систему, способную к самостоятельному решению проблем и адаптации к изменяющимся условиям. Это требует не только развития алгоритмов, но и глубокого понимания принципов работы интеллекта как такового. И, возможно, именно в этом направлении и кроется ключ к созданию действительно разумных машин.
Оригинал статьи: https://arxiv.org/pdf/2601.21199.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
- Интервью с создателями фильма «Пятая группа крови»
- Как установить SteamOS на игровые портативные устройства ROG Ally и Legion Go под управлением Windows
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
- Финальное обновление Minecraft года официально здесь — Mounts of Mayhem добавляет сражения верхом в Overworld.
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
- Motorola Edge 70 Ultra ОБЗОР: современный дизайн, скоростная зарядка, огромный накопитель
- Motorola Moto G77 ОБЗОР: яркий экран, лёгкий, чёткое изображение
- Автофокус. В чём разница между AF-S и AF объективами.
2026-01-31 05:05