Автор: Денис Аветисян
В статье представлен всесторонний обзор области пространственного ИИ, объединяющий возможности агентов с задачами, требующими пространственного мышления.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"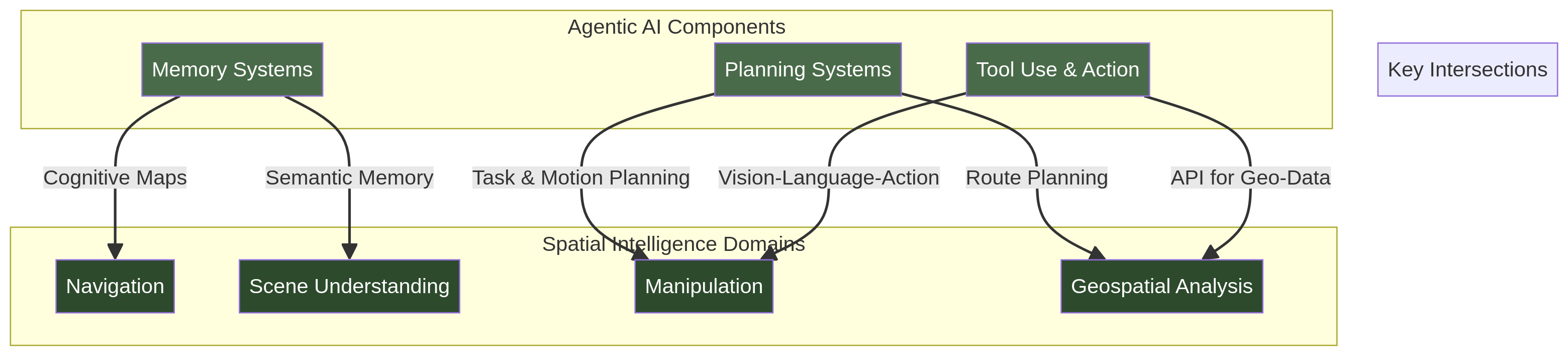
Комплексный анализ моделей мира, графовых нейронных сетей и перспектив Sim-to-Real переноса для создания надежных автономных систем.
Несмотря на успехи больших языковых моделей в символических задачах, их применение в физическом мире сталкивается с ограничениями, связанными с пространственным интеллектом. В работе ‘From Perception to Action: Spatial AI Agents and World Models’ представлен всесторонний обзор, объединяющий агентские возможности с пространственными задачами различного масштаба. Авторы предлагают трехмерную таксономию, выявляющую ключевые тенденции и проблемы в области пространственного искусственного интеллекта, включая важность иерархических систем памяти, интеграции графовых нейронных сетей с большими языковыми моделями и роль мировых моделей для безопасного развертывания автономных систем. Какие унифицированные оценочные рамки необходимы для стандартизации кросс-доменной оценки и ускорения развития следующего поколения пространственно-осведомленных автономных систем в робототехнике и геопространственном анализе?
Вызовы и Перспективы Пространственного Искусственного Интеллекта
Традиционные подходы в искусственном интеллекте сталкиваются со значительными трудностями при решении пространственных задач, требующих планирования на длительный горизонт. Существующие алгоритмы часто демонстрируют неустойчивость при необходимости предвидеть последствия действий и координировать их в сложных средах. Проблема заключается в том, что многие модели, успешно применяемые в других областях, плохо учитывают пространственные взаимосвязи и не способны эффективно оценивать долгосрочные последствия своих действий. Это приводит к ошибкам в навигации, неоптимальному использованию ресурсов и неспособности адаптироваться к изменяющимся условиям. Поэтому, разработка новых архитектур и алгоритмов, способных к более глубокому пониманию пространства и долгосрочному планированию, является ключевой задачей в области искусственного интеллекта.
Достижение надёжного долгосрочного планирования в задачах, связанных с пространством, сталкивается с существенными трудностями из-за ограничений последовательных моделей. Традиционные подходы, обрабатывающие информацию линейно, зачастую не способны эффективно улавливать сложные взаимосвязи между объектами и их расположением в пространстве. Это приводит к тому, что при планировании на длительные горизонты, когда необходимо учитывать множество факторов и предвидеть последствия действий, такие модели испытывают трудности с построением оптимальных траекторий и принятием обоснованных решений. Ограничения в понимании пространственных отношений напрямую влияют на способность агента предсказывать результаты своих действий и адаптироваться к изменяющейся обстановке, что критически важно для успешного выполнения задач в сложных средах.
Для создания искусственного интеллекта, способного надежно ориентироваться и функционировать в сложных окружениях, требуются принципиально новые архитектурные решения. Традиционные подходы, основанные на последовательной обработке данных, оказываются неэффективными при планировании действий на длительный период и учете пространственных взаимосвязей. Необходимы системы, способные моделировать окружающую среду, прогнозировать последствия действий и адаптироваться к изменяющимся условиям. Разработка таких систем предполагает интеграцию методов компьютерного зрения, SLAM (Simultaneous Localization and Mapping), и алгоритмов обучения с подкреплением, что позволит агентам не просто воспринимать мир, но и активно взаимодействовать с ним, принимая обоснованные решения для достижения поставленных целей. Успешная реализация подобных архитектур станет ключевым шагом на пути к созданию автономных роботов и интеллектуальных систем, способных решать сложные задачи в реальном мире.
Мировые Модели и Реляционное Рассуждение
Использование `WorldModelFoundation` позволяет агентам моделировать будущие состояния окружающей среды и планировать действия на их основе. Однако, эффективность данного подхода напрямую зависит от способа представления пространственной информации. Необходимость в компактном и структурированном описании сцены обусловлена вычислительными ограничениями, связанными с моделированием сложных взаимодействий и предсказанием траекторий объектов. Неэффективное представление пространственных данных может привести к экспоненциальному росту вычислительных затрат и снижению точности прогнозов, что делает задачу оптимизации представления ключевой для успешного применения `WorldModelFoundation` в практических приложениях.
Представление пространственных сцен в виде графов с использованием `GNNFoundation` позволяет агентам осуществлять реляционное рассуждение и понимать взаимодействие объектов. В данном подходе, объекты в сцене моделируются как узлы графа, а их взаимосвязи — как ребра. Это позволяет алгоритмам графовых нейронных сетей (GNN) эффективно анализировать структуру сцены, выявлять зависимости между объектами и предсказывать их поведение. Использование GNN позволяет учитывать не только свойства отдельных объектов, но и контекст их расположения и взаимосвязей, что критически важно для задач планирования и навигации в сложных средах. Эффективность такого подхода обусловлена способностью GNN обобщать информацию о взаимосвязях между объектами, что позволяет агентам адаптироваться к новым, ранее не встречавшимся ситуациям.
Проведенный обзор охватил 742 работы, использующие подходы, основанные на World Models и GNNFoundation. Анализ литературных источников позволил сформировать всесторонний обзор текущего состояния исследований в данной области. Полученные результаты подтверждают критическую важность эффективного представления пространственной информации для успешного моделирования мира и осуществления логических выводов об отношениях между объектами, что является ключевым фактором для разработки интеллектуальных агентов.
Преодоление Разрыва Между Симуляцией и Реальностью
Разрыв между симуляцией и реальностью (Sim-to-Real Gap) представляет собой значительное препятствие при внедрении пространственных AI-агентов в практические приложения. Этот разрыв возникает из-за несоответствия между контролируемой средой симуляции и непредсказуемостью реального мира, что приводит к снижению производительности агентов при переходе из симуляции в реальную обстановку. Несоответствие может проявляться в различных аспектах, включая визуальные различия, физические свойства объектов, а также в шуме и неопределенности, присутствующих в реальных данных. Преодоление этого разрыва является критически важным для успешного развертывания AI-агентов в таких областях, как робототехника, автономное вождение и навигация.
Для уменьшения расхождения между симуляцией и реальным миром, возникающего при развертывании пространственного ИИ, применяются методы переноса обучения (Sim-to-Real Transfer). К ним относятся доменная рандомизация, заключающаяся в обучении агента в разнообразных, случайно изменяемых симуляционных средах, и адаптация, направленная на корректировку поведения агента в реальной среде на основе данных, полученных в симуляции. Доменная рандомизация повышает устойчивость агента к вариациям, встречающимся в реальном мире, а адаптация позволяет учитывать специфические особенности реальной среды, такие как освещение, текстуры и шум сенсоров. Комбинирование этих подходов позволяет создавать более надежных и адаптируемых агентов, способных успешно функционировать в реальных условиях.
Интеграция графовых нейронных сетей (GNN) с большими языковыми моделями (LLM) позволяет агентам пространственного ИИ значительно улучшить свои возможности рассуждения и обобщения. GNN эффективно обрабатывают и извлекают информацию из графовых представлений окружающей среды, в то время как LLM обеспечивают возможность обработки и генерации естественного языка, а также применения знаний, полученных из обширных текстовых данных. Комбинируя эти подходы, агенты могут не только понимать структуру окружения, но и использовать контекстную информацию для принятия более обоснованных решений и адаптации к новым, ранее не встречавшимся ситуациям, повышая их надежность и устойчивость в реальных условиях эксплуатации. Такая интеграция позволяет агентам выходить за рамки простого распознавания образов и демонстрировать более сложные когнитивные способности.
Масштабируемость и Безопасность Пространственного Интеллекта
Пространственный интеллект, или способность машин понимать и взаимодействовать с окружающим миром, находит применение в самых различных масштабах. От точной манипуляции объектами на микроуровне — например, в роботизированной хирургии или сборке микроэлектроники — до глобального геопространственного анализа, охватывающего целые континенты и используемого в задачах картографии, мониторинга окружающей среды и планирования городской инфраструктуры. Такая универсальность обусловлена тем, что принципы, лежащие в основе пространственного понимания, применимы независимо от размера и сложности задачи. Разработка алгоритмов, способных эффективно функционировать как в условиях ограниченных ресурсов и высокой точности на микромасштабе, так и при обработке огромных массивов данных на макромасштабе, является ключевым направлением развития искусственного интеллекта и открывает новые возможности для автоматизации и оптимизации процессов в самых разных сферах.
Развертывание моделей искусственного интеллекта непосредственно на периферийных устройствах, таких как дроны, роботы или встроенные системы, открывает возможности для обработки пространственных данных в реальном времени даже при ограниченных вычислительных ресурсах и пропускной способности сети. Это позволяет осуществлять автономную навигацию, распознавание объектов и принятие решений непосредственно на месте, без необходимости отправлять данные в облако. Такой подход критически важен для приложений, требующих мгновенной реакции и высокой надежности, например, в беспилотном транспорте, промышленной автоматизации или системах безопасности. Возможность локальной обработки данных также способствует повышению конфиденциальности и снижению задержек, делая пространственный ИИ доступным и эффективным в самых разнообразных сценариях.
В рамках данного исследования были выделены шесть ключевых вызовов, стоящих перед областью пространственного искусственного интеллекта. Эти вызовы охватывают широкий спектр задач — от обеспечения надежности и безопасности систем, работающих в реальном времени, до разработки алгоритмов, способных эффективно обрабатывать огромные объемы пространственных данных. Особое внимание уделяется масштабируемости решений, позволяющей применять их как в микросредах, например, для манипулирования объектами, так и в макросредах, таких как геопространственный анализ. Идентификация этих вызовов призвана служить ориентиром для будущих исследований и разработок, направленных на создание безопасных и масштабируемых систем пространственного ИИ, способных решать сложные задачи в различных областях применения.
К Совместным Пространственным Системам
Координация множества агентов является ключевым элементом решения сложных пространственных задач, требующих коллективного интеллекта. В ситуациях, где необходимо одновременное выполнение действий в динамически меняющейся среде, отдельные агенты, действующие независимо, часто оказываются неэффективными. Именно согласованное взаимодействие, позволяющее агентам обмениваться информацией, планировать совместные действия и адаптироваться к непредвиденным обстоятельствам, обеспечивает оптимальное решение. Такой подход особенно важен при моделировании сложных систем, таких как управление транспортными потоками, робототехника в ограниченном пространстве или координация поисково-спасательных операций, где успех зависит от способности каждого агента действовать в соответствии с общей стратегией и учитывать действия других участников.
Сочетание графового рассуждения и больших языковых моделей открывает новые горизонты в области пространственного интеллекта. Традиционные методы, основанные на жестких алгоритмах, часто оказываются неэффективными при решении сложных задач, требующих понимания контекста и неявных связей. Интеграция графовых представлений, позволяющих моделировать отношения между объектами и их свойствами, с возможностями больших языковых моделей по обработке естественного языка и генерации осмысленных планов, позволяет создавать системы, способные не только ориентироваться в пространстве, но и понимать намерения, предсказывать последствия действий и адаптироваться к изменяющимся условиям. Такой подход позволяет, например, создавать роботов, способных не просто выполнять заданные команды, но и самостоятельно планировать маршруты, избегать препятствий и взаимодействовать с окружающей средой, основываясь на понимании ситуации и доступной информации. \mathbb{S} = \{x \in \mathbb{R}^n : ||x|| \leq 1\} Подобные системы найдут применение в широком спектре областей, от автономной навигации и робототехники до городского планирования и управления логистикой.
Данное исследование представляет собой унифицированную таксономию возможностей пространственного искусственного интеллекта, основанную на трех ключевых осях: способность, задача и масштаб. Эта структура позволяет систематизировать и сравнивать различные подходы к решению пространственных задач, от простых навигационных алгоритмов до сложных систем координации мультиагентов. Классификация по способности определяет, какие когнитивные навыки демонстрирует система — например, восприятие, планирование или обучение. Ось «задача» отражает конкретный тип пространственной проблемы, которую система призвана решить — будь то маршрутизация, картографирование или координация действий. Наконец, «масштаб» учитывает размер и сложность среды, в которой функционирует система. Предложенная таксономия служит основой для четкого понимания текущего состояния и будущих направлений развития пространственного ИИ, облегчая анализ и сравнение различных методов и способствуя разработке более эффективных и универсальных систем.
Исследование пространственного искусственного интеллекта, представленное в данной работе, подчеркивает важность целостного подхода к разработке автономных систем. Авторы справедливо отмечают, что эффективное функционирование агентов требует не просто обработки данных, но и построения внутренних моделей мира, способных к обобщению и адаптации. Это созвучно мысли Г.Х. Харди: «Математика — это не набор фактов, а способ мышления». Подобно тому, как математик стремится к элегантности и ясности в своих доказательствах, так и разработчик пространственного ИИ должен стремиться к созданию систем, способных к эффективному и надежному решению задач, опираясь на фундаментальные принципы пространственного рассуждения и моделирования мира. Сложность заключается в том, что каждая оптимизация, как справедливо отмечено, создает новые точки напряжения, требующие постоянного внимания и переосмысления архитектуры системы.
Куда же дальше?
Представленный обзор демонстрирует, что область пространственного искусственного интеллекта, несмотря на значительный прогресс, всё ещё находится в поиске фундаментальной элегантности. Подобно попыткам пересадить сердце, не понимая циркуляции крови, увлечение отдельными алгоритмами, такими как графовые нейронные сети, часто затмевает необходимость целостного взгляда на проблему. Создание действительно автономных систем требует не просто моделирования пространства, но и понимания его динамики, причинно-следственных связей и, что наиболее сложно, неопределенности.
Ключевой вызов, несомненно, заключается в преодолении разрыва между симуляцией и реальностью. Простое увеличение объема данных для обучения, вероятно, не решит проблему, если сама модель не способна к адаптации и обобщению. Потребуется разработка принципиально новых подходов к представлению знаний, которые позволят агентам не просто ориентироваться в пространстве, но и предвидеть последствия своих действий, подобно опытному навигатору, читающему карту.
В конечном счете, успех в этой области будет зависеть от способности создать системы, которые не просто решают задачи, но и понимают их контекст. Иначе, мы рискуем получить сложные, но хрупкие конструкции, подверженные ошибкам и неспособные к надежной работе в непредсказуемом мире. Простота и ясность, как всегда, будут ключевыми принципами в этом поиске.
Оригинал статьи: https://arxiv.org/pdf/2602.01644.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Huawei nova 15 Max ОБЗОР
- Honor 600 ОБЗОР: отличная камера, объёмный накопитель, плавный интерфейс
- Российский рынок: дефляция, рубль и геополитика – обзор ключевых событий недели (06.05.2026 19:32)
- Oppo Find X9s Pro ОБЗОР: скоростная зарядка, современный дизайн, замедленная съёмка видео
- Xiaomi Redmi 10C ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков
- Wiko Hi Enjoy 60s ОБЗОР: быстрый сенсор отпечатков, большой аккумулятор
- ВИ.РУ акции прогноз. Цена VSEH
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
2026-02-03 15:35