Автор: Денис Аветисян
Исследователи разработали вычислительную модель, точно имитирующую человеческое поведение при одновременном поиске объектов визуально и слухово.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Представленная модель Sensonaut объединяет принципы рационального принятия решений и перцептивного вывода для успешного прогнозирования результатов поиска в виртуальной реальности.
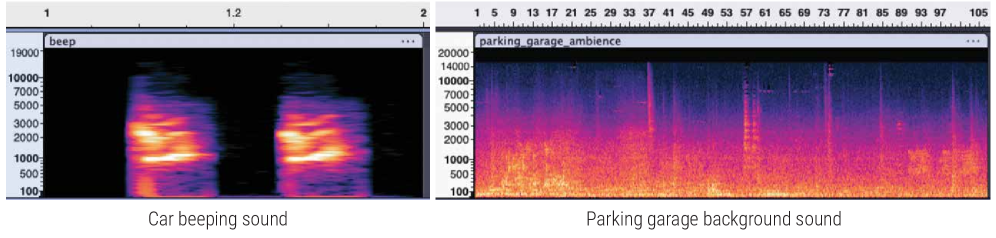
Поиск целевого объекта по аудиовизуальным подсказкам, будь то автомобиль на парковке или говорящий в виртуальной встрече, требует баланса между усилиями, временем и точностью в условиях неопределенности. В статье ‘Simulating Human Audiovisual Search Behavior’ представлена вычислительная модель Sensonaut, имитирующая человеческое поведение при аудиовизуальном поиске. Модель основана на предположении, что люди адаптируют свои движения и сенсорные стратегии, оптимизируя шансы на обнаружение цели, и формулируется как задача рационального принятия решений с частичной наблюдаемостью. Успешное воспроизведение масштабирования времени и усилий поиска в зависимости от сложности задачи, окклюзий и отвлекающих факторов, а также характерных человеческих ошибок, позволяет предположить, что данная модель может стать основой для разработки аудиовизуальных интерфейсов, минимизирующих когнитивную нагрузку и затраты на поиск?
Поиск в Сложных Средах: Вызов для Интеллектуальных Систем
Поиск целей в сложных средах требует эффективной интеграции множественных сенсорных сигналов, что представляет собой значительную проблему для современных вычислительных моделей. В реальном мире объекты редко обнаруживаются по одному признаку; скорее, успешный поиск зависит от одновременной обработки и объединения визуальной, слуховой и других сенсорных данных. Существующие алгоритмы часто испытывают трудности с корректной интерпретацией противоречивой или неполной информации, особенно в условиях зашумленности или частичной видимости. Неспособность эффективно объединять эти сенсорные модальности приводит к снижению точности, увеличению времени поиска и, в конечном итоге, к неспособности агента успешно ориентироваться и функционировать в сложных, динамичных окружениях. Разработка систем, способных к бесшовному объединению различных сенсорных потоков, является ключевой задачей для создания по-настоящему интеллектуальных и адаптивных агентов.
Традиционные подходы к разработке систем поиска и взаимодействия с окружающей средой часто рассматривают восприятие и действие как отдельные, изолированные процессы. Однако, в реальности, эти два аспекта неразрывно связаны: восприятие формирует цели и стратегии действия, а действие, в свою очередь, активно влияет на то, что и как воспринимается. Такое разделение приводит к неэффективности, поскольку системы не способны адаптироваться к меняющимся условиям и оптимально использовать сенсорную информацию. Например, при поиске объекта, взгляд человека не просто сканирует пространство, а направляется к тем областям, которые, по предварительным оценкам, наиболее вероятны для обнаружения цели, что является результатом предвидения и планирования действий. Игнорирование этой взаимосвязи препятствует созданию действительно интеллектуальных систем, способных к гибкому и эффективному взаимодействию со сложным миром.
Изучение того, как человек бесшовно объединяет слуховую и зрительную информацию при поиске, является ключевым фактором в создании по-настоящему интеллектуальных систем. Исследования показывают, что мозг постоянно интегрирует эти два типа сенсорных данных, создавая целостное представление об окружающей среде и позволяя быстро и эффективно находить цели даже в сложных условиях. В отличие от традиционных подходов, которые рассматривают зрение и слух как отдельные процессы, современные модели стремятся воспроизвести эту естественную интеграцию. Понимание механизмов, лежащих в основе мультисенсорной обработки, позволит создать алгоритмы, способные адаптироваться к неопределенности реального мира и эффективно функционировать в динамичных средах, приближая искусственный интеллект к человеческому уровню восприятия и поведения.
В реальных условиях функционирования агентов, будь то роботы или программные системы, неизбежно присутствует неопределенность. Эта неопределенность, обусловленная неполнотой информации об окружающей среде, требует от агентов не пассивного реагирования, а активного сбора данных и принятия обоснованных решений в условиях ограниченных ресурсов. Агенты должны уметь оценивать степень неопределенности, определять наиболее информативные действия для ее снижения и планировать свои действия таким образом, чтобы максимизировать вероятность успеха при минимальных затратах. Такой подход, основанный на активном исследовании среды и адаптации к изменяющимся обстоятельствам, является ключевым для создания интеллектуальных систем, способных эффективно функционировать в сложных и непредсказуемых условиях. Способность эффективно справляться с неопределенностью отличает успешных агентов от тех, которые оказываются неспособными адаптироваться к реальности.
Sensonaut: Рациональный Поиск в Реальном Мире
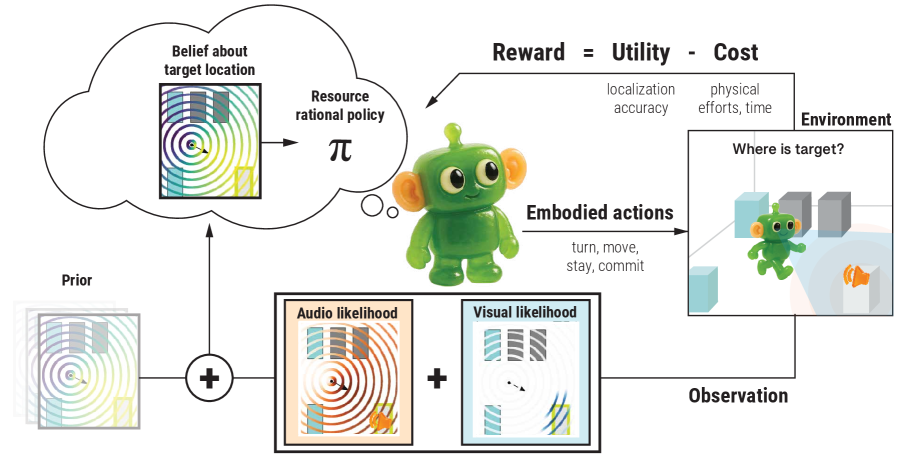
Модель «Sensonaut» представляет собой вычислительную систему, разработанную для моделирования процесса поиска объектов, осуществляемого человеком с использованием аудиовизуальной информации. Система имитирует поведение человека при поиске, объединяя обработку звуковых и визуальных сигналов в едином алгоритме. Особенностью «Sensonaut» является акцент на воплощенном поиске — моделирование не только обработки сенсорной информации, но и физических действий, таких как перемещение и вращение головы, необходимых для получения и обработки информации об окружающей среде. Разработка направлена на создание платформы для исследования когнитивных механизмов, лежащих в основе визуального и слухового поиска в реальных условиях.
Модель Sensonaut функционирует в рамках формализма Частично Наблюдаемого Марковского Процесса Принятия Решений (POMDP), что позволяет ей осуществлять последовательное принятие решений в условиях неопределенности. POMDP предполагает, что агент не имеет полного доступа к состоянию окружающей среды, а лишь воспринимает частичные наблюдения. В контексте Sensonaut, это означает, что модель должна оценивать вероятность местоположения цели, основываясь на неполных сенсорных данных, и выбирать действия (например, перемещение или поворот головы) для уменьшения неопределенности и максимизации вероятности успешного поиска. Применение POMDP позволяет формально описать процесс принятия решений, учитывая как текущие наблюдения, так и историю предыдущих действий и наблюдений, что необходимо для моделирования рационального поведения в сложных и динамичных средах.
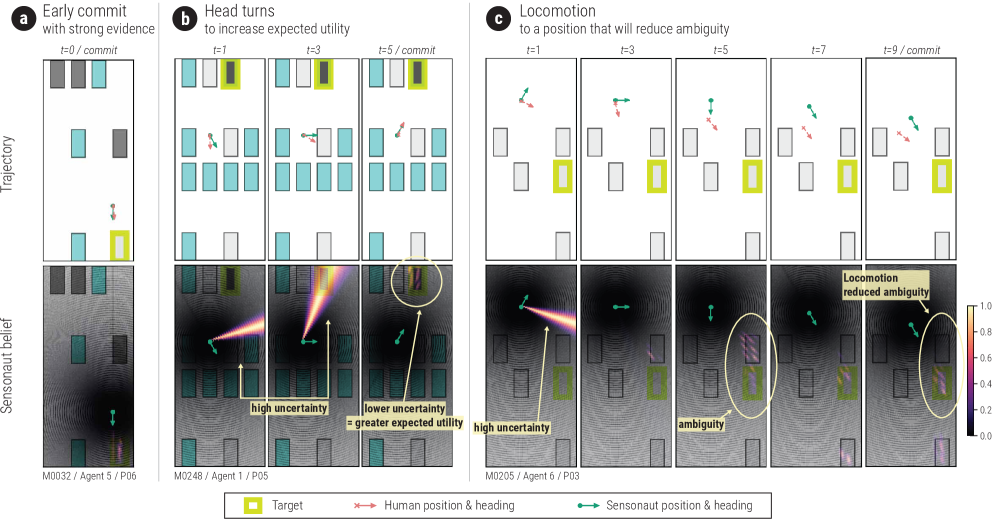
В основе функционирования модели Sensonaut лежит принцип рациональности ресурсов, который предполагает балансировку между ценностью получаемой информации и затратами на действия, необходимые для её получения. Данный принцип учитывает, что каждое действие, такое как перемещение (локомоция) или поворот головы, требует определенных затрат энергии или времени. Модель оценивает потенциальную пользу от получения новой информации о местоположении цели и сопоставляет её с этими затратами. Если ожидаемая ценность информации превышает затраты на действие, действие выполняется для улучшения оценки местоположения цели; в противном случае, модель стремится минимизировать затраты и избегает ненужных действий. Этот подход позволяет модели эффективно осуществлять поиск, оптимизируя соотношение между затратами и полученными данными, что является ключевым аспектом рационального поведения.
В модели Sensonaut интеграция аудиовизуальной информации осуществляется посредством байесовского вывода. Этот процесс позволяет динамически обновлять вероятностное представление о местоположении целевого объекта на основе поступающих сенсорных данных. В частности, поступающие звуковые и визуальные сигналы используются для формирования апостериорного распределения вероятностей, которое отражает текущую уверенность модели в местоположении цели. P(\theta|x) \propto P(x|\theta)P(\theta), где P(\theta|x) — апостериорная вероятность местоположения θ при условии полученных данных x, P(x|\theta) — вероятность получения данных x при заданном местоположении θ, а P(\theta) — априорное распределение вероятностей, отражающее начальные предположения о местоположении.
Подтверждение Эффективности Sensonaut: Данные о Человеческом Поведении
Для сбора данных о поведении человека в процессе поиска информации был проведен аудиовизуальный поисковый эксперимент с участием добровольцев в среде виртуальной реальности. Участники выполняли задачи по поиску целевых объектов, в то время как регистрировались их движения головы и взгляда, а также время реакции и паттерны сканирования окружения. Полученные данные включали в себя точные координаты движения головы, фиксации взгляда и временные характеристики, формируя комплексный набор поведенческих метрик, необходимых для валидации модели Sensonaut. Данный экспериментальный дизайн позволил получить высокоточные и детализированные данные о стратегиях поиска в условиях, приближенных к реальным.
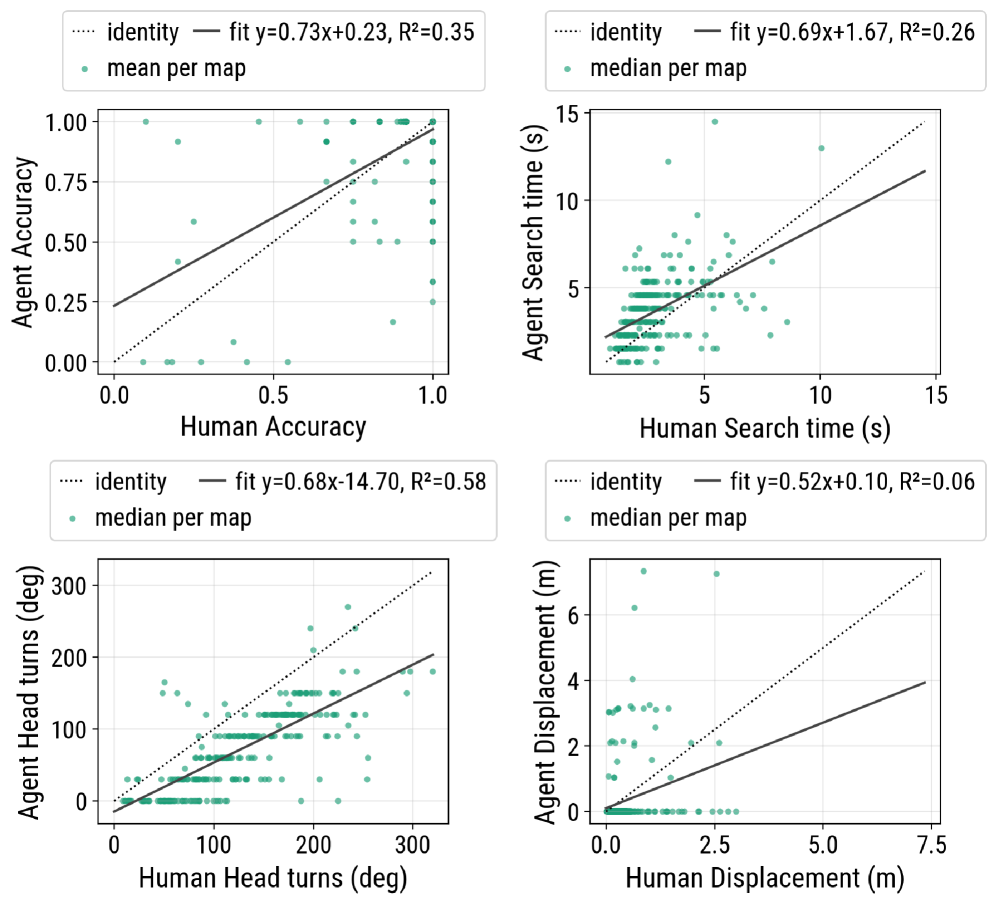
Полученные данные о поведении человека в ходе выполнения аудиовизуального поиска в виртуальной реальности были использованы для строгой проверки предсказаний модели Sensonaut. Оценка проводилась на предмет способности модели воспроизводить паттерны поиска, характерные для человека. Процесс включал сравнение траекторий взгляда, стратегий сканирования сцены и времени реакции на стимулы. Сопоставление данных Sensonaut и данных, полученных от участников эксперимента, позволило количественно оценить степень соответствия между моделью и человеческим поведением при решении задачи поиска информации в виртуальной среде.
Результаты экспериментов показали высокую корреляцию между поведением агента Sensonaut и действиями людей при выполнении визуально-слухового поиска, составившую 0.58 по углу поворота головы. Данный показатель свидетельствует об эффективном воспроизведении моделью стратегий движения головы, характерных для человеческого поведения. Корреляция 0.58 указывает на то, что Sensonaut адекватно моделирует направление и интенсивность движений головы, используемых людьми для поиска и анализа информации в виртуальной среде, что является важным подтверждением валидности модели.
Модель Sensonaut демонстрирует способность предсказывать стратегии сбора информации, используемые людьми, и адаптировать поисковые алгоритмы в условиях неопределенности окружающей среды. В ходе экспериментов, модель достигла уровня точности, сопоставимого с человеческой производительностью при выполнении аналогичных задач. Примечательно, что модель полностью воспроизводит ошибки, вызванные перекрытиями объектов (100% воспроизводимость ошибок, обусловленных окклюзиями), что свидетельствует о ее способности моделировать когнитивные ограничения, влияющие на человеческое восприятие и поиск информации в сложных визуальных сценах.
Влияние Sensonaut на Искусственный Интеллект и Робототехнику
Разработанная модель Sensonaut представляет собой систематизированный подход к проектированию роботов и агентов искусственного интеллекта, позволяющий им эффективно ориентироваться и взаимодействовать со сложными окружающими средами. В основе подхода лежит идея создания принципиальной схемы, определяющей ключевые компоненты и их взаимосвязи, необходимые для успешной адаптации и функционирования в реальных условиях. В отличие от традиционных методов, Sensonaut акцентирует внимание на создании целостной системы, учитывающей как сенсорные данные, так и ограничения, связанные с ресурсами и возможностями конкретного агента. Это позволяет создавать более надежные, гибкие и эффективные системы, способные решать широкий спектр задач в динамично меняющейся обстановке, от автономной навигации до сложного манипулирования объектами.
В основе модели Sensonaut лежит акцент на воплощенном познании, что подчеркивает критическую важность интеграции восприятия, действий и внутреннего состояния для достижения разумного поведения. Данный подход предполагает, что интеллект не является абстрактной вычислительной функцией, а возникает из взаимодействия организма с окружающей средой. Именно тесная связь между сенсорными данными, двигательными реакциями и внутренними представлениями о мире позволяет агенту эффективно адаптироваться к сложным условиям и принимать обоснованные решения. В отличие от традиционных подходов к искусственному интеллекту, которые часто фокусируются на обработке информации в отрыве от физической реализации, Sensonaut рассматривает тело и его возможности как неотъемлемую часть познавательного процесса, что открывает новые перспективы в создании более гибких и эффективных роботизированных систем.
В рамках Sensonaut, особое внимание уделяется моделированию ограниченности ресурсов — ключевого аспекта, определяющего эффективность и устойчивость систем искусственного интеллекта. Данный подход позволяет разрабатывать алгоритмы, способные оптимально распределять доступные вычислительные мощности, энергию и пропускную способность данных. В отличие от традиционных моделей, часто предполагающих неограниченные ресурсы, Sensonaut стимулирует создание ИИ, способного адаптироваться к реальным ограничениям окружающей среды и функционировать в условиях дефицита. Это особенно важно для робототехнических систем, работающих в автономном режиме и требующих длительной работы от батареи, а также для развертывания ИИ в условиях ограниченной инфраструктуры. Моделирование ресурсных ограничений не только повышает практическую применимость ИИ, но и способствует созданию более экологичных и энергоэффективных систем.
Дальнейшие исследования Sensonaut направлены на расширение возможностей модели для работы в более сложных условиях. В частности, планируется изучение алгоритмов, позволяющих агентам эффективно осуществлять поиск нескольких целей одновременно, учитывая при этом изменяющуюся обстановку. Разрабатываемые подходы позволят роботам и системам искусственного интеллекта адаптироваться к динамическим средам, оптимизируя свои действия в реальном времени и эффективно используя ограниченные ресурсы. Особое внимание будет уделено созданию алгоритмов, способных прогнозировать изменения в окружающей среде и планировать действия на основе вероятностных оценок, что существенно повысит надежность и эффективность работы агентов в непредсказуемых ситуациях.
Представленная работа демонстрирует стремление к элегантности в моделировании человеческого поведения. Sensonaut, как вычислительная модель, успешно воспроизводит процесс аудиовизуального поиска, опираясь на принципы рационального принятия решений и перцептивного вывода. Это подчеркивает важность понимания структуры поведения для его точного воспроизведения. Как однажды заметил Г.Х. Харди: «Математика — это наука о том, что можно логически доказать, а не о том, что кажется правдой». В данном исследовании, логическая структура модели Sensonaut позволила не только воспроизвести, но и предсказать поведение человека в задаче поиска, подтверждая, что простота и ясность структуры — залог надежности и точности.
Куда Далее?
Представленная модель Sensonaut, безусловно, демонстрирует элегантность в простоте интеграции рационального принятия решений и перцептивной инференции. Однако, следует признать, что успешное предсказание поведения в виртуальной реальности — лишь первый шаг. Настоящая сложность заключается не в точности симуляции, а в масштабируемости принципов. Не вычислительная мощность определяет успех, а ясность идей. Вопрос в том, как эти принципы экстраполировать за пределы контролируемой лабораторной среды, где количество факторов сведено к минимуму.
Представляется, что будущее исследований лежит в понимании взаимодействия между Sensonaut и более сложными, «естественными» экосистемами информации. Необходимо учитывать влияние непредсказуемых отвлекающих факторов, когнитивной перегрузки и, что особенно важно, индивидуальных различий в стратегии поиска. Модель, способная адаптироваться к этим переменным, станет не просто симуляцией, а инструментом для изучения фундаментальных принципов человеческого восприятия и принятия решений.
Важно помнить, что даже самая изящная модель — это лишь приближение к реальности. Истинное понимание требует постоянного пересмотра базовых предположений и готовности к неожиданным открытиям. Очевидно, что структура определяет поведение, но поведение, в свою очередь, может раскрыть скрытые аспекты структуры. Задача исследователя — не создать идеальную копию, а понять лежащие в основе принципы.
Оригинал статьи: https://arxiv.org/pdf/2602.02790.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
- Интервью с создателями фильма «Пятая группа крови»
- Как установить SteamOS на игровые портативные устройства ROG Ally и Legion Go под управлением Windows
- Motorola Moto G77 ОБЗОР: яркий экран, лёгкий, чёткое изображение
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
- Финальное обновление Minecraft года официально здесь — Mounts of Mayhem добавляет сражения верхом в Overworld.
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
- Motorola Edge 70 Ultra ОБЗОР: современный дизайн, скоростная зарядка, огромный накопитель
- Вот как превратить ваш Android-телефон в Windows Phone в 2024 году
2026-02-04 20:14