Автор: Денис Аветисян
Новая система, использующая миоэлектрические сигналы, позволяет людям с параличом обеих рук выполнять повседневные задачи дома с помощью мобильного робота-манипулятора.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"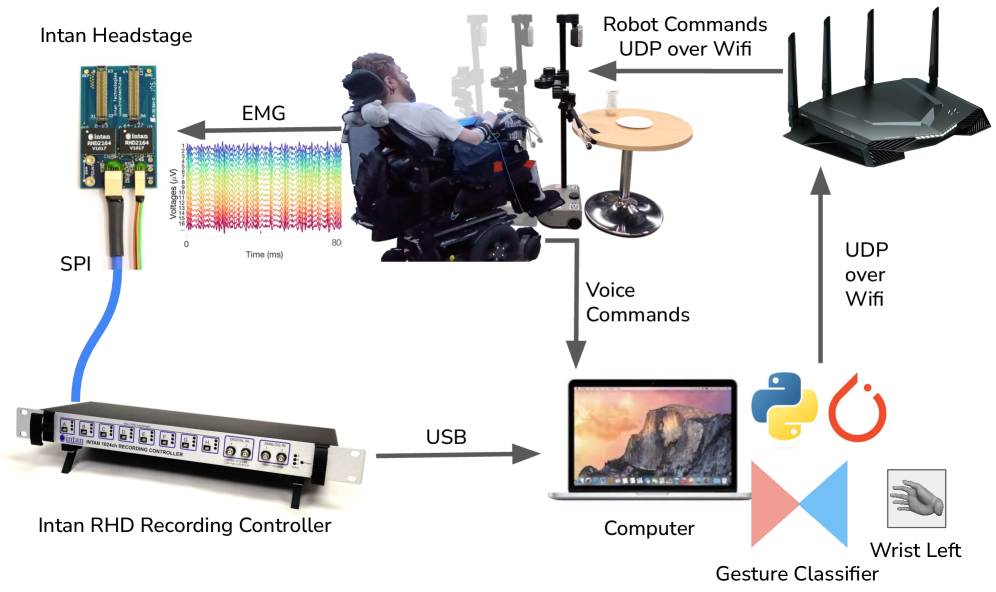
Разработана носимая двуручная система управления на основе высокоплотного электромиографического (HDEMG) контроля с элементами совместной автономии для мобильной манипуляции в домашних условиях.
Несмотря на значительные достижения в области робототехники, обеспечение автономности для людей с тетраплегией в условиях реальной домашней среды остается сложной задачей. В данной работе, посвященной ‘Bimanual High-Density EMG Control for In-Home Mobile Manipulation by a User with Quadriplegia’, представлена первая система, позволяющая пользователю с тетраплегией управлять мобильным манипулятором дома посредством двустороннего управления на основе высокоплотного электромиографического (HDEMG) сигнала. Разработанные носимые рукава с HDEMG-сенсорами и объединенная система с общим управлением, включающая компьютерное зрение и обработку естественного языка, обеспечивают эффективное выполнение бытовых задач. Каковы перспективы расширения подобных систем для повышения независимости и качества жизни людей с ограниченными возможностями?
Преодоление Ограничений: Реабилитация и Автономность для Людей с Тетраплегией
Люди с тетраплегией, часто являющейся следствием травмы шейного отдела спинного мозга (ТШСМ), сталкиваются с серьезными ограничениями в выполнении повседневных действий. Это касается не только физических задач, таких как одевание или прием пищи, но и более сложных видов деятельности, требующих координации и силы, например, самостоятельного перемещения или управления предметами. Потеря моторных функций в руках и ногах значительно усложняет даже самые простые действия, требуя постоянной помощи со стороны других людей или использования специализированных вспомогательных технологий. Данные ограничения существенно влияют на качество жизни, приводя к снижению независимости, социальной изоляции и психологическому дискомфорту. Понимание специфики этих трудностей является ключевым для разработки эффективных стратегий реабилитации и создания более доступной среды.
Существующие вспомогательные технологии для людей с тетраплегией часто оказываются недостаточно адаптированными к индивидуальным потребностям и особенностям домашней обстановки. Несмотря на значительный прогресс в разработке роботизированных устройств и систем управления, многие из них требуют сложной настройки, ограничивают спонтанность действий и не всегда интуитивно понятны в использовании. Это создает дополнительные трудности для людей с ограниченными возможностями, затрудняя выполнение даже самых простых задач в повседневной жизни. Недостаточная гибкость и сложность интеграции в домашнюю среду снижают эффективность этих технологий, препятствуя достижению полной независимости и повышению качества жизни.
Совместное Управление: Роботизированный Помощник в Быту
В рамках данного исследования для обеспечения физической помощи в бытовых условиях используется мобильный манипулятор Hello Robot Stretch. Данная платформа представляет собой мобильную базу, оснащенную роботизированной рукой с семью степенями свободы и системой сенсоров для восприятия окружающей среды. Stretch обладает способностью к перемещению по стандартным домашним помещениям, обходу препятствий и манипулированию объектами различной формы и веса до 2 кг. Конструкция робота предполагает возможность безопасного взаимодействия с людьми и предметами, что критически важно для применения в домашней среде. Программное обеспечение робота позволяет интегрировать разработанные алгоритмы управления и восприятия для реализации задач, связанных с оказанием физической помощи.
В основе системы лежит концепция совместного управления (shared autonomy), объединяющая намерения пользователя с возможностями робота для безопасного и эффективного выполнения задач. Это достигается путем постоянного обмена информацией между пользователем и роботом, где пользователь задает общую цель, а робот, используя свои сенсоры и алгоритмы планирования, реализует ее, при этом постоянно оценивая безопасность и эффективность действий. В случае возникновения неопределенности или потенциально опасных ситуаций, система запрашивает уточнения у пользователя, обеспечивая контроль над процессом и предотвращая нежелательные последствия. Данный подход позволяет снизить когнитивную нагрузку на пользователя, делегируя рутинные операции роботу, и одновременно гарантирует, что робот действует в соответствии с ожиданиями и предпочтениями человека.
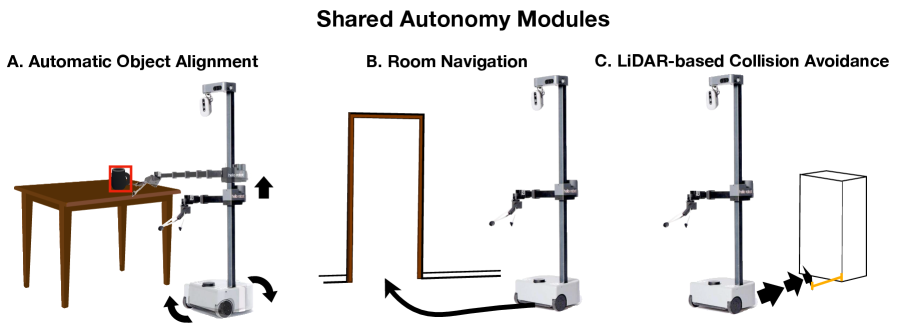
Для оптимизации взаимодействия и снижения усилий пользователя, предложенная система использует модули автоматической ориентации объектов и навигации в помещении. Модуль ориентации объектов позволяет роботу самостоятельно выравнивать захват относительно цели, компенсируя незначительные неточности позиционирования и обеспечивая надежный захват. Модуль навигации обеспечивает автономное перемещение робота в пределах домашней среды, обходя препятствия и планируя оптимальный маршрут к целевому объекту или месту. Комбинированное использование этих модулей снижает потребность в ручном управлении и повышает эффективность выполнения задач.
Расшифровка Намерения: Высокоплотный ЭМГ и Классификация Жестов
Для регистрации остаточных нейромышечных сигналов мышц пользователя был использован электромиографический (ЭМГ) рукав с высокой плотностью электродов. Данная технология позволяет неинвазивно измерять электрическую активность мышц, возникающую при попытке движения или даже при намерении движения. Высокая плотность электродов обеспечивает более точное и детальное картирование активности мышц, что критически важно для последующей классификации жестов и управления мобильным манипулятором. Рукав обеспечивает надежный контакт с кожей, минимизируя помехи и обеспечивая стабильный сигнал.
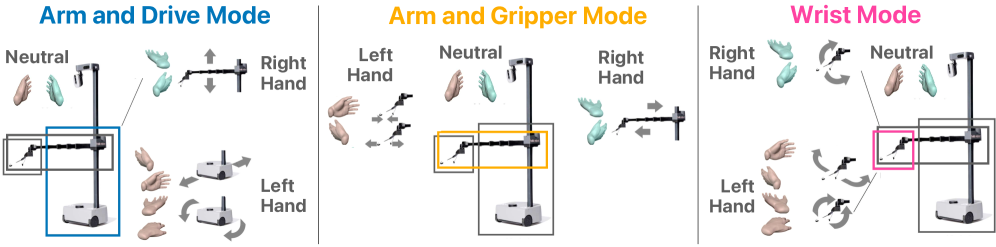
Сигналы, полученные с помощью миоэлектрографии, обрабатываются системой классификации жестов, демонстрирующей точность тестирования 90.9% ± 5.3% для левой руки и 98.0% ± 2.0% для правой руки. Данная точность была достигнута при использовании классификатора, обученного распознавать три различных жеста. Указанные значения точности представляют собой средние показатели, полученные в ходе тестирования системы, и отражают ее способность надежно идентифицировать заданные жесты с обеих рук.
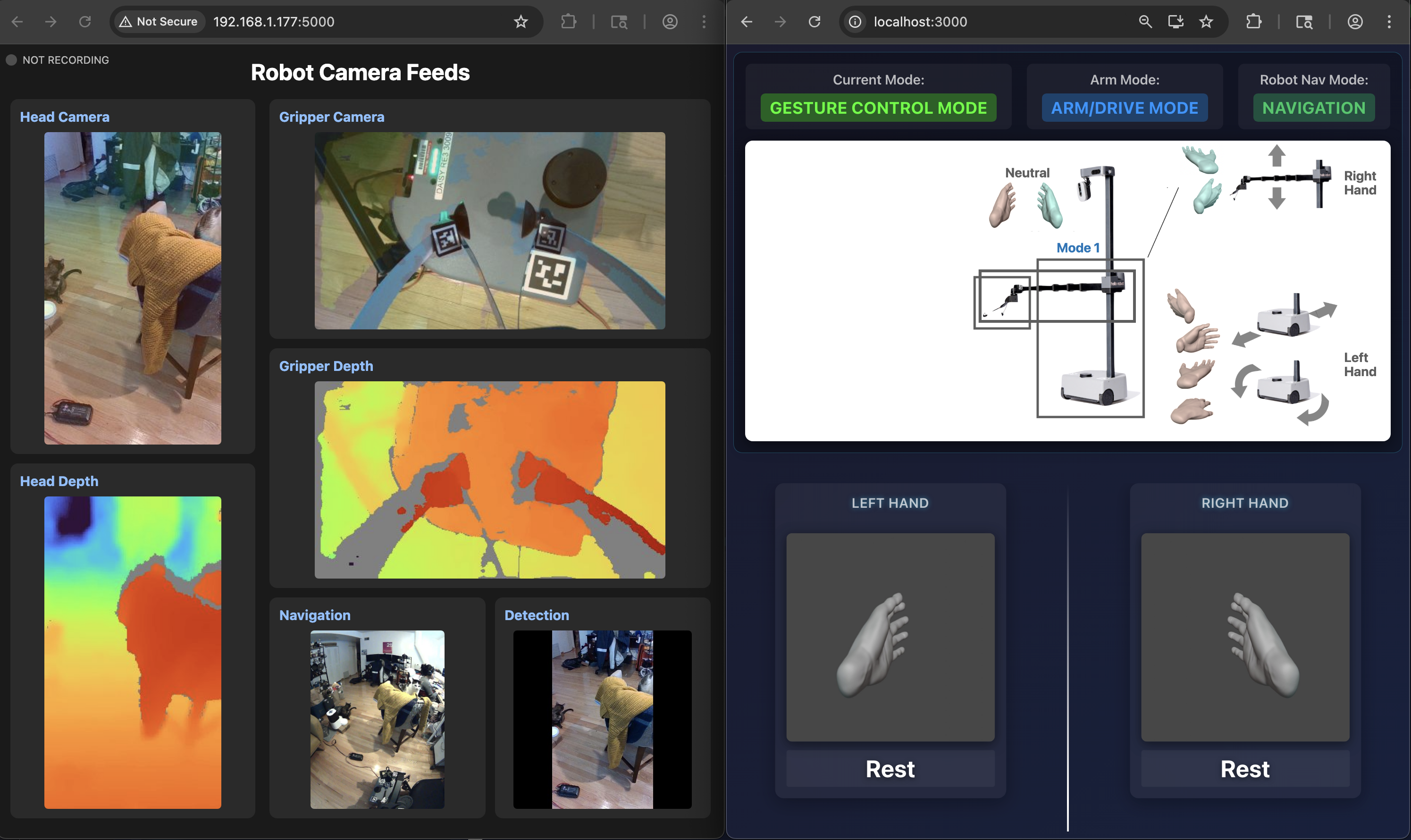
Классифицированные жесты интегрированы в систему совместного управления (shared autonomy), обеспечивая интуитивное управление мобильным манипулятором. Данная интеграция позволяет пользователю контролировать действия манипулятора посредством распознанных мышечных сигналов, делегируя при этом часть задач автоматической системе для повышения эффективности и безопасности. Система совместного управления обеспечивает динамическое переключение между прямым управлением пользователем и автоматическим выполнением задач, оптимизируя взаимодействие человека и робота в реальном времени.
Практическая Валидация и Опыт Пользователя: От Лаборатории к Реальности
Для подтверждения практической применимости и эффективности разработанной системы, проводилось тестирование непосредственно в домашних условиях участников исследования. Такой подход позволил оценить функциональность устройства в реальной повседневной жизни, а не в стерильной лабораторной обстановке. Участники использовали систему на протяжении продолжительного периода времени, что позволило выявить возможные недостатки и внести необходимые улучшения, основанные на опыте реальной эксплуатации. Оценка проводилась в естественной среде, максимально приближенной к обычной рутине, что обеспечило более достоверные результаты и подтвердило потенциал системы для улучшения качества жизни людей с ограниченными возможностями.
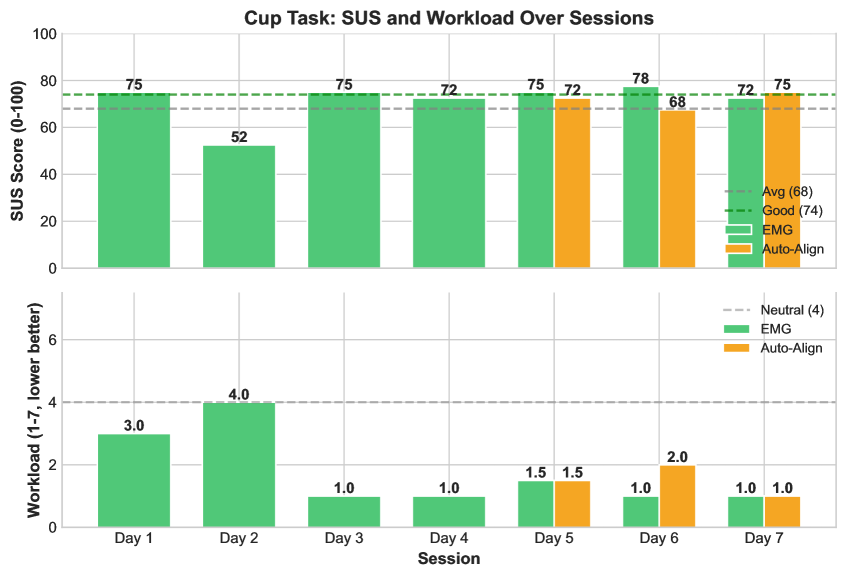
Для оценки удобства использования разработанной системы применялся широко распространенный опросник System Usability Scale (SUS), позволяющий количественно оценить субъективное восприятие пользователем простоты и эффективности интерфейса. Параллельно с этим, нагрузка на оператора, выраженная в ментальной и физической усталости, оценивалась с помощью метрики NASA-TLX — многомерного инструмента, учитывающего различные аспекты когнитивной нагрузки. Комбинация этих двух методов позволила получить комплексную оценку взаимодействия человека с системой, выявив не только степень ее удобства, но и уровень усилий, необходимых для выполнения задач, что является критически важным для пользователей с ограниченными возможностями.
Данное исследование демонстрирует работоспособность бимануальной системы HDEMG в виде рукава, позволяющей человеку с тетраплегией выполнять разнообразные повседневные задачи. В ходе испытаний было зафиксировано снижение времени, необходимого для выполнения задачи по питью из чашки, примерно на 33 секунды в день с практикой. Это свидетельствует о потенциале системы значительно улучшить автономность и качество жизни людей с ограниченными двигательными возможностями, предоставляя им более эффективный и интуитивно понятный способ взаимодействия с окружающим миром и выполнения рутинных действий.
Исследование демонстрирует, что сложные системы управления, такие как предложенная HDEMG система для мобильной манипуляции, требуют глубокого понимания взаимодействия между человеком и машиной. Подобно тому, как реверс-инжиниринг позволяет понять устройство сложного механизма, данный подход к управлению роботизированной рукой позволяет человеку с тетраплегией эффективно взаимодействовать с окружающим миром. Как однажды заметил Эдсгер Дейкстра: «Программирование — это не поиск решений, а предотвращение проблем». Эта фраза прекрасно иллюстрирует суть работы: система не просто предоставляет возможность выполнения задач, но и предвидит потенциальные сложности, обеспечивая надежность и безопасность взаимодействия для пользователя. Особенно важна концепция shared autonomy, поскольку она позволяет системе адаптироваться к возможностям пользователя, минимизируя когнитивную нагрузку и максимизируя эффективность.
Что дальше?
Представленная работа — лишь фрагмент карты, а не сама территория. Система управления, основанная на HDEMG, безусловно, открывает новые возможности для людей с тетраплегией, однако реальность, как всегда, сложнее. Необходимо помнить: электрические сигналы мышц — это шум, а извлечение осмысленных команд — попытка дешифровки протокола, исходный код которого нам ещё предстоит прочитать. Совершенствование алгоритмов декодирования — это, конечно, важно, но не менее критично понимание того, как мозг адаптируется к новому интерфейсу, как формируется «чувство» управления роботизированной рукой.
Очевидным направлением дальнейших исследований является расширение спектра выполняемых задач. Управление манипулятором в лабораторных условиях — это одно, а интеграция в реальную домашнюю среду, с её непредсказуемостью и хаосом — совершенно другое. Необходимо учитывать вариативность физиологических сигналов, влияние усталости, эмоционального состояния пользователя. Более того, сама концепция «помощи» нуждается в переосмыслении. Не стоит ли стремиться не к полному контролю над роботом, а к симбиозу, где машина берет на себя рутинные задачи, позволяя человеку сконцентрироваться на более важных вещах?
В конечном итоге, HDEMG-управление — это не просто технологическая проблема, а философский вызов. Это попытка взломать систему, понять, как работает мозг, как формируется воля, как мы взаимодействуем с окружающим миром. И в этом процессе неизбежны ошибки, тупики, неожиданные открытия. Ведь реальность — это открытый исходный код, который мы ещё не прочитали.
Оригинал статьи: https://arxiv.org/pdf/2602.02773.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Huawei nova 15 Max ОБЗОР
- Wiko Hi Enjoy 60s ОБЗОР: быстрый сенсор отпечатков, большой аккумулятор
- ВИ.РУ акции прогноз. Цена VSEH
- Honor 600 ОБЗОР: отличная камера, объёмный накопитель, плавный интерфейс
- Oppo Find X9s Pro ОБЗОР: скоростная зарядка, современный дизайн, замедленная съёмка видео
- Российский рынок: дефляция, рубль и геополитика – обзор ключевых событий недели (06.05.2026 19:32)
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Как обновить Windows 10 до 11, используя локальную учётную запись — пошаговое руководство по обходу требования к учётной записи Microsoft.
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
2026-02-05 04:37