Автор: Денис Аветисян
Новый подход к управлению роботами объединяет реактивные и рациональные стратегии, позволяя достичь надежной и интерпретируемой автономной навигации.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"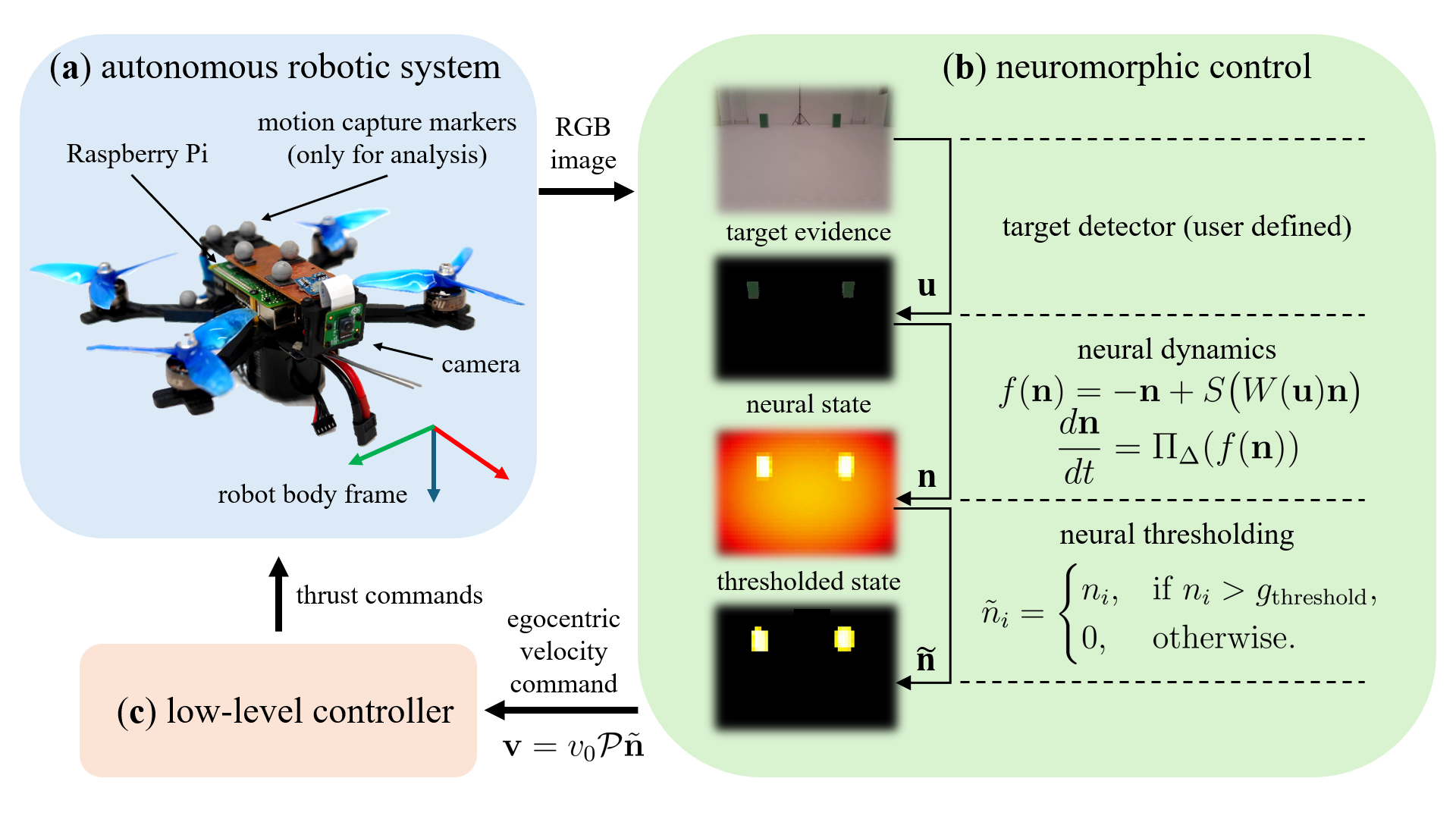
В статье представлен биоинспирированный фреймворк нейроморфного управления, использующий динамику кольцевых аттракторов для преодоления симметрии и принятия решений в задачах автономной навигации и отслеживания.
Традиционные подходы к автономной навигации роботов сталкиваются с трудностями при согласовании реактивного управления, основанного на сенсорах, и планирования, требующего значительных вычислительных ресурсов. В данной работе, ‘From Vision to Decision: Neuromorphic Control for Autonomous Navigation and Tracking’, предложен новый нейроморфный фреймворк управления, объединяющий эти подходы посредством био-вдохновленной динамики нейронных сетей для эффективного разрешения симметрии и достижения надежного автономного поведения. Предложенная система преобразует визуальную информацию в команды движения, используя механизм динамической бифуркации для преодоления нерешительности, возникающей при отсутствии доминирующего целевого ориентира. Не откроет ли это путь к созданию более гибких и энергоэффективных автономных систем, способных к адаптивному поведению в сложных условиях?
Сложность Однозначной Навигации в Симметричных Средах
Традиционные алгоритмы роботизированной навигации сталкиваются с серьезными трудностями в симметричных средах, что приводит к неспособности принять однозначное решение о дальнейшей траектории и, как следствие, к неэффективному планированию пути. В таких пространствах, где визуальные ориентиры повторяются или отсутствуют уникальные признаки, робот испытывает затруднения в определении своего точного местоположения и ориентации. Это проявляется в колебаниях, зацикливании или, в худшем случае, полной остановке, поскольку система не может надежно отличить одно идентичное место от другого. Проблема усугубляется при наличии шумов в сенсорных данных, что еще больше размывает границы между возможными траекториями и заставляет робота тратить ценное время и ресурсы на бесплодные попытки выбора оптимального пути. В конечном итоге, неспособность эффективно ориентироваться в симметричных пространствах значительно ограничивает возможности применения роботов в таких областях, как складская логистика, поисково-спасательные операции и исследование закрытых помещений.
Проблема симметрически-индуцированной нерешительности в автономной навигации возникает из-за неоднозначности сенсорных данных, с которыми сталкивается робот. В симметричных средах, таких как коридоры с повторяющимися элементами или пустые комнаты, различные положения и ориентации могут давать практически идентичные показания датчиков. Это приводит к тому, что робот не может однозначно определить свое местоположение и ориентацию в пространстве, что затрудняет планирование эффективного маршрута. В результате, система навигации может испытывать затруднения с выбором оптимального действия, что проявляется в нерешительности, застревании или непредсказуемом поведении. По сути, робот сталкивается с ситуацией, когда сенсорная информация недостаточна для уникальной идентификации его состояния, что требует разработки специальных алгоритмов для разрешения этой неопределенности.
Традиционные методы автономной навигации, такие как поля потенциала и оптимизационный метод модельно-прогнозного управления (MPC), часто оказываются неэффективными в условиях симметричной среды, приводя к остановкам или хаотичному движению робота. Проблема заключается в неспособности этих алгоритмов однозначно интерпретировать сенсорные данные в условиях неоднозначности, что приводит к неверному определению местоположения и ориентации. Особенно важно отметить, что MPC, несмотря на свою теоретическую точность, требует значительно больших вычислительных ресурсов, чем предлагаемая альтернатива — Neural Dynamics, что делает его непригодным для применения в системах реального времени и на платформах с ограниченной вычислительной мощностью. В отличие от MPC, Neural Dynamics обеспечивает более быструю и эффективную обработку информации, что позволяет роботу оперативно реагировать на изменения в окружающей среде и избегать застревания в симметричных пространствах.

Нейроморфное Управление: Биологически Вдохновленное Решение
Предлагаемый подход, “Нейроморфное управление”, представляет собой систему, использующую принципы нейронной динамики и модель кольцевого аттрактора для обеспечения надежной и эффективной навигации. В основе лежит имитация механизмов мозга, позволяющих поддерживать стабильные представления о непрерывных переменных, таких как направление и положение, даже в условиях неопределенности. Ключевым элементом является создание динамической нейронной сети, способной к адаптации и проактивному планированию траектории. Архитектура системы обеспечивает сопоставимую производительность с политической сетью обучения с подкреплением, имеющей 11-мерный вход, два скрытых слоя по 256 нейронов и 2-мерный выход.
В основе подхода к управлению лежит способность мозга поддерживать стабильные представления непрерывных переменных, таких как курс и положение, даже в условиях неопределенности. В отличие от традиционных систем, полагающихся на точные измерения и фильтрацию шумов, данная система эмулирует нейронные механизмы, позволяющие сохранять информацию о состоянии, несмотря на неполные или противоречивые сенсорные данные. Это достигается за счет динамической организации нейронной сети, в которой стабильность представления обеспечивается не абсолютной точностью данных, а относительной силой сигнала и взаимным усилением нейронов, формирующих аттрактор. В результате система способна к устойчивой навигации и планированию траектории, даже при наличии помех и неточностей в данных, поступающих от датчиков.
В основе системы управления лежит интеграция сенсорной информации, в частности, данных о визуальных ориентирах, получаемых с камеры, в динамическую нейронную сеть. Этот процесс позволяет формировать проактивные и адаптивные планы движения. По производительности, данная система сопоставима с политической сетью, используемой в обучении с подкреплением, имеющей 11-мерный вход, два скрытых слоя по 256 нейронов каждый и 2-мерный выход. Данное сравнение указывает на эффективность предложенного подхода с точки зрения вычислительных затрат и скорости работы.
Базовая Динамика и Реализация Системы
В основе управления на основе нейроморфных принципов лежит двойное представление динамики системы: в виде непрерывных ( \frac{dx}{dt} = f(x) ) и дискретных ( x_{k+1} = x_k + \Delta t \cdot f(x_k) ) динамических моделей. Непрерывное представление обеспечивает математическую точность и позволяет анализировать фундаментальные свойства системы, в то время как дискретизация необходима для практической реализации алгоритмов управления на цифровых вычислительных платформах. Использование обоих представлений позволяет сочетать преимущества теоретического анализа и возможности реализации на аппаратном обеспечении, что критически важно для управления сложными системами в реальном времени.
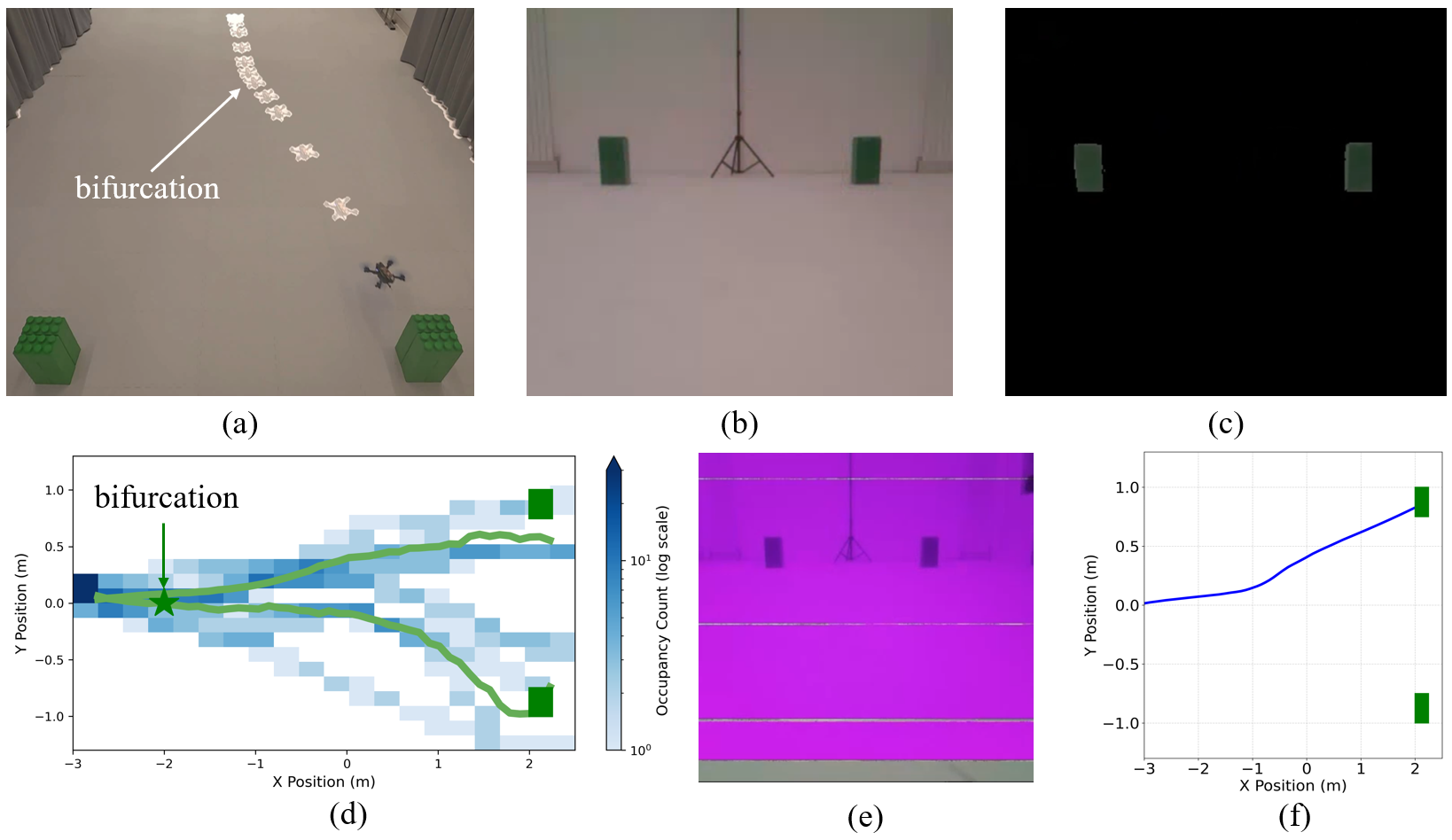
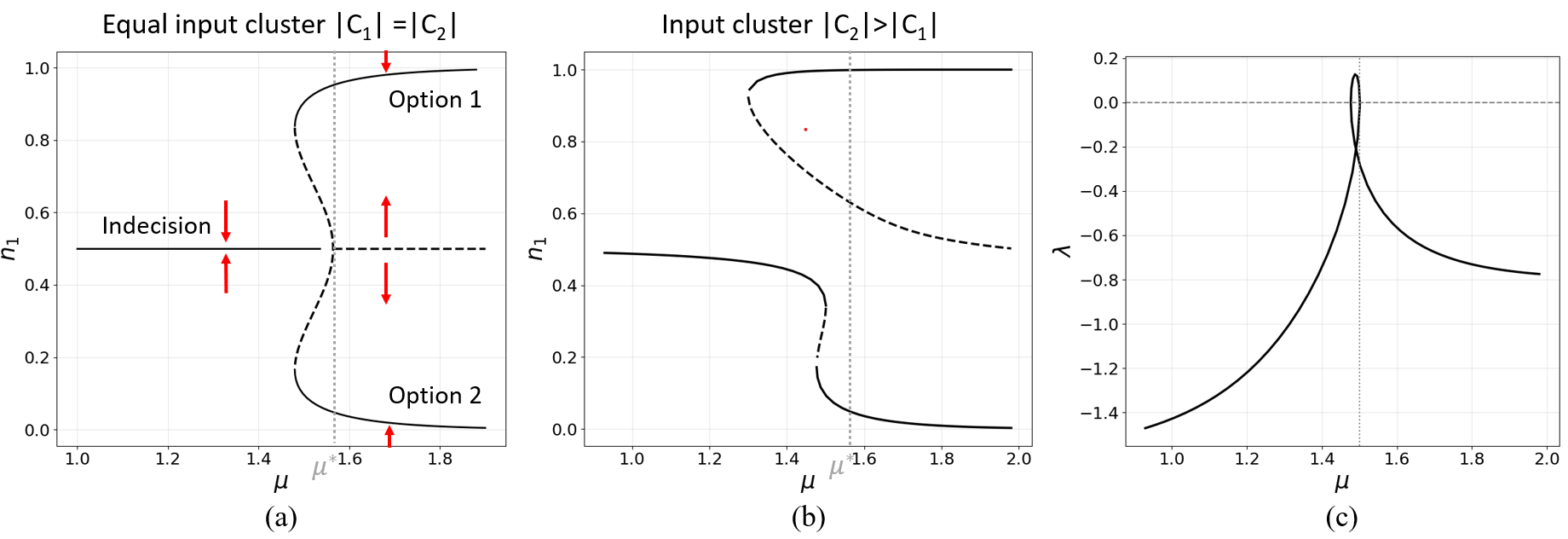
Механизм бифуркации играет ключевую роль в разрешении симметрии системы, обеспечивая выбор предпочтительного направления движения. Этот механизм основан на введении неустойчивости в критических точках принятия решений. В данной реализации точка бифуркации зафиксирована приблизительно на отметке 124°. Это означает, что при достижении системой определенного состояния, соответствующего углу 124°, возникает локальная неустойчивость, приводящая к переходу в одно из возможных направлений, определяемых структурой нейронной сети. Значение угла бифуркации является параметром системы и может быть настроено для оптимизации производительности в различных сценариях.
Реализация фреймворка выполнена на платформе квадрокоптера, оснащенного вычислительным устройством Raspberry Pi для обработки данных непосредственно на борту. Для обеспечения высокой точности сбора данных и верификации результатов используется система захвата движения. Нейронная популяция, формирующая основу управления, имеет размер 64×32, что соответствует полю зрения менее 180 градусов. Такая конфигурация позволяет проводить эксперименты в реальном времени и валидировать эффективность алгоритмов управления на физической платформе.
Валидация и Производительность в Симулированных и Реальных Условиях
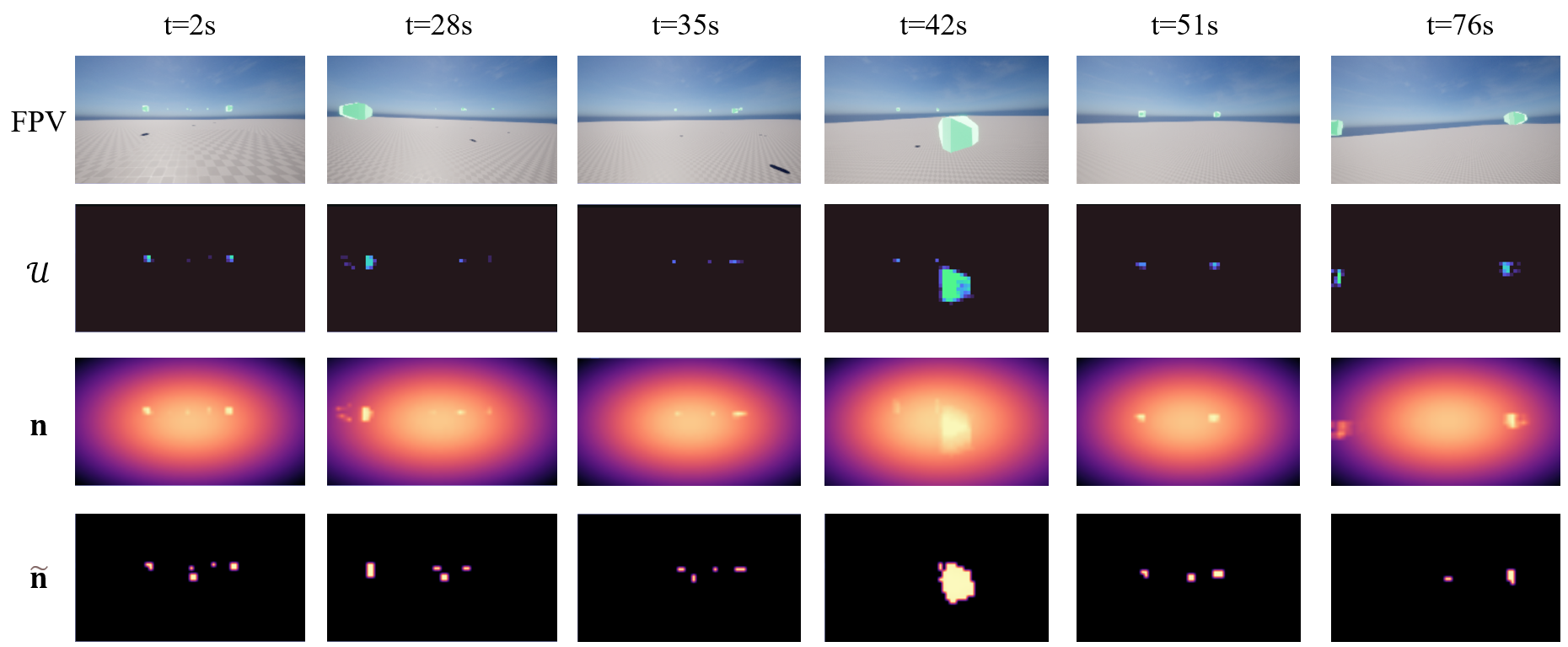
Система “Нейроморфное управление” прошла всестороннюю проверку в фотореалистичной симуляции “AirGen”, демонстрируя впечатляющую способность к навигации в сложных, симметричных пространствах. Исследование показало, что система стабильно достигает поставленных целей с высоким процентом успешных попыток, даже в условиях, требующих точного позиционирования и ориентации. Этот результат подтверждает эффективность предложенного подхода к управлению и указывает на его потенциал для применения в реальных робототехнических системах, где способность ориентироваться в сложных окружениях является критически важной. Использование симуляции “AirGen” позволило создать контролируемую среду для тестирования и оптимизации алгоритмов, а также позволило получить надежные данные о производительности системы перед ее внедрением в реальные условия.
Данная система управления демонстрирует универсальность, успешно реализуя как дистантную, так и проксимальную навигацию. Дистантная навигация опирается на внутренние модели окружения, позволяя планировать маршрут и ориентироваться в пространстве, основываясь на предварительных знаниях. В свою очередь, проксимальная навигация функционирует, реагируя на непосредственные сенсорные данные, что обеспечивает адаптацию к изменяющимся условиям и непредсказуемым препятствиям. Сочетание этих двух подходов позволяет системе эффективно функционировать в различных сценариях, обеспечивая надежное и гибкое перемещение в сложных условиях, вне зависимости от доступности предварительной информации или динамики окружения.
Система управления, использующая нелинейную динамику мнений, демонстрирует повышенную устойчивость и точность в сложных условиях навигации благодаря способности динамически интегрировать информацию для разрешения неоднозначностей и поддержания стабильного курса. В основе этого подхода лежит идея, что различные источники данных, представляющие собой «мнения» о наилучшем направлении движения, взаимодействуют друг с другом нелинейным образом, формируя консенсус. В отличие от традиционных методов, требующих значительных вычислительных ресурсов, таких как модельно-прогностическое управление, предложенная система использует методы потенциальных полей и нейронной динамики, отличающиеся низкой вычислительной сложностью и высокой эффективностью. Это позволяет реализовать надежную и экономичную навигацию даже в условиях ограниченных ресурсов и высокой неопределенности.
Представленная работа демонстрирует изящную простоту в решении сложной задачи — автономной навигации. Авторы, словно архитекторы, выстраивают систему управления, основанную на принципах био-вдохновленной нейродинамики. Подобно тому, как симметрия может привести к нерешительности, система сталкивается с необходимостью «нарушения симметрии» для принятия эффективных решений. Ада Лавлейс заметила: «Я считаю, что механизмы могут выполнять все, что мы можем придумать». В данном случае, механизм, основанный на кольцевом аттракторе, успешно разрешает неоднозначность, позволяя системе переходить от реактивной навигации к обдуманным действиям. Если система кажется сложной, она, вероятно, хрупка, и авторам удалось избежать этой участи, предложив элегантное и интерпретируемое решение.
Что дальше?
Представленная работа, хоть и демонстрирует элегантность подхода к разрешению симметрии в задачах навигации, неизбежно поднимает вопросы о масштабируемости и робастности системы в условиях реального мира. Устойчивость, порожденная ясными границами, — это хорошо в модели, но как эта структура будет выдерживать шум и неопределенность, присущие сенсорным данным? Простота — это сила, но не является ли слишком упрощенным взгляд на принятие решений в сложной, многомерной среде?
Следующим шагом видится исследование возможностей адаптации динамики кольцевого аттрактора к задачам, требующим более сложного планирования и прогнозирования. Необходимо учитывать, что поведение системы — это не просто следствие внутренней структуры, но и результат взаимодействия с постоянно меняющейся внешней средой. Иными словами, необходимо выйти за рамки чисто реактивного управления и исследовать возможности интеграции с механизмами, обеспечивающими предвидение и адаптацию.
В конечном счете, истинный прогресс заключается не в создании все более сложных систем, а в поиске принципов, позволяющих строить устойчивые и интерпретируемые модели поведения, которые могут быть применены к широкому спектру задач. Возможно, ключ к успеху лежит не в имитации мозга, а в понимании фундаментальных принципов, лежащих в основе его работы — принципов, которые, как показывает эта работа, могут быть сформулированы в терминах симметрии, разрыва симметрии и динамических аттракторов.
Оригинал статьи: https://arxiv.org/pdf/2602.05683.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- СПБ Биржа: «Газпром» в фаворе, «Т-техно» под давлением, дефицит юаней тревожит инвесторов (22.03.2026 22:33)
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- Как самому почистить матрицу. Продолжение.
- Макросъемка
- Российский рынок: между ставкой ЦБ, геополитикой и отчетами компаний (25.03.2026 17:32)
- Прогнозы цен на эфириум к рублю: анализ криптовалюты ETH
- Три простых изменения в светлой комнате, чтобы создать свой объект съемки.
- MINISFORUM добавляет опцию Ryzen 9 8945HX в линейку мини-ПК MS-A2
- От фотографий к фильмам: полное руководство по переходу на видеосъемку
- Motorola Edge 30 Pro ОБЗОР: скоростная съёмка видео, скоростная зарядка, беспроводная зарядка
2026-02-06 16:00