Автор: Денис Аветисян
Новая система глубокого обучения позволяет роботам точнее манипулировать предметами, фильтруя собственные тактильные ощущения и распознавая внешние контакты.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"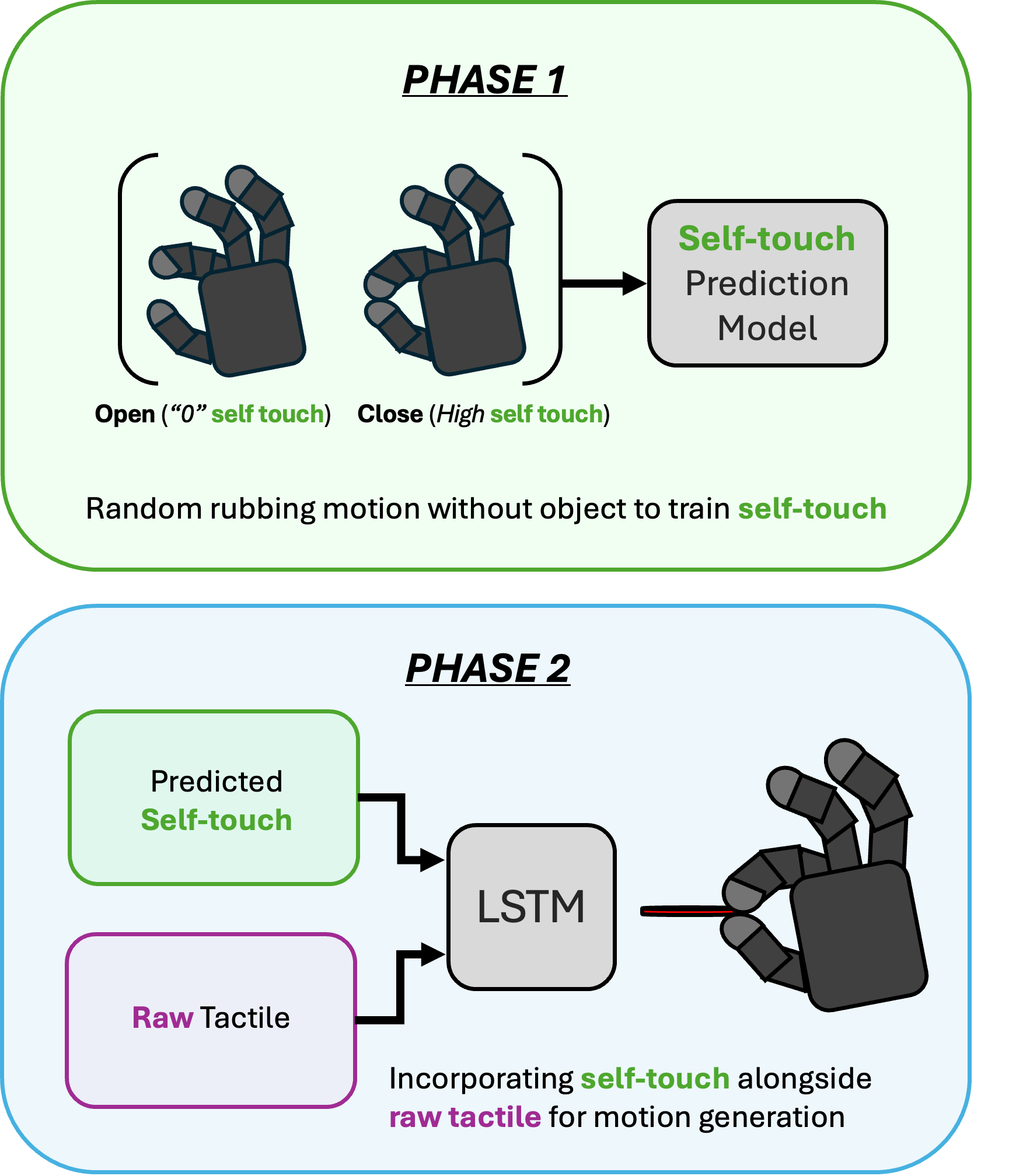
Предложена архитектура TaSA, использующая предсказуемое обучение для подавления самовоздействия и улучшения восприятия объектов при захвате и манипулировании.
Несмотря на значительные успехи в робототехнике, надежное выполнение сложных манипуляций предметами в руке остается сложной задачей из-за трудностей в различении тактильных сигналов, вызванных контактом с объектом и самовоздействием. В данной работе, представленной в статье ‘TaSA: Two-Phased Deep Predictive Learning of Tactile Sensory Attenuation for Improving In-Grasp Manipulation’, предложен фреймворк TaSA, использующий глубокое предсказательное обучение для моделирования и подавления тактильных ощущений от самовоздействия. Это позволяет более точно определять контакты с объектом и значительно повышает успешность выполнения задач, таких как вставка карандаша в корпус или закрепление скрепки. Сможет ли подобный подход к сенсорной аттенуации приблизить роботов к уровню ловкости человеческой руки?
Преодолевая границы манипуляций: вызов ловкости
Современная робототехника в области манипуляций часто сталкивается с ограничениями, обусловленными зависимостью от заранее запрограммированных, стабильных захватов. В отличие от человеческой руки, способной адаптироваться к изменяющимся условиям и форме объекта, большинство роботов полагаются на жестко заданные траектории и положения. Это приводит к низкой эффективности при работе со сложными или непредсказуемыми объектами, а также к невозможности выполнения деликатных операций, требующих тонкой моторики и постоянной коррекции захвата. Такой подход существенно ограничивает возможности роботов в сферах, где требуется гибкость и способность к импровизации, например, в сборке сложных механизмов или в оказании помощи в бытовых задачах.
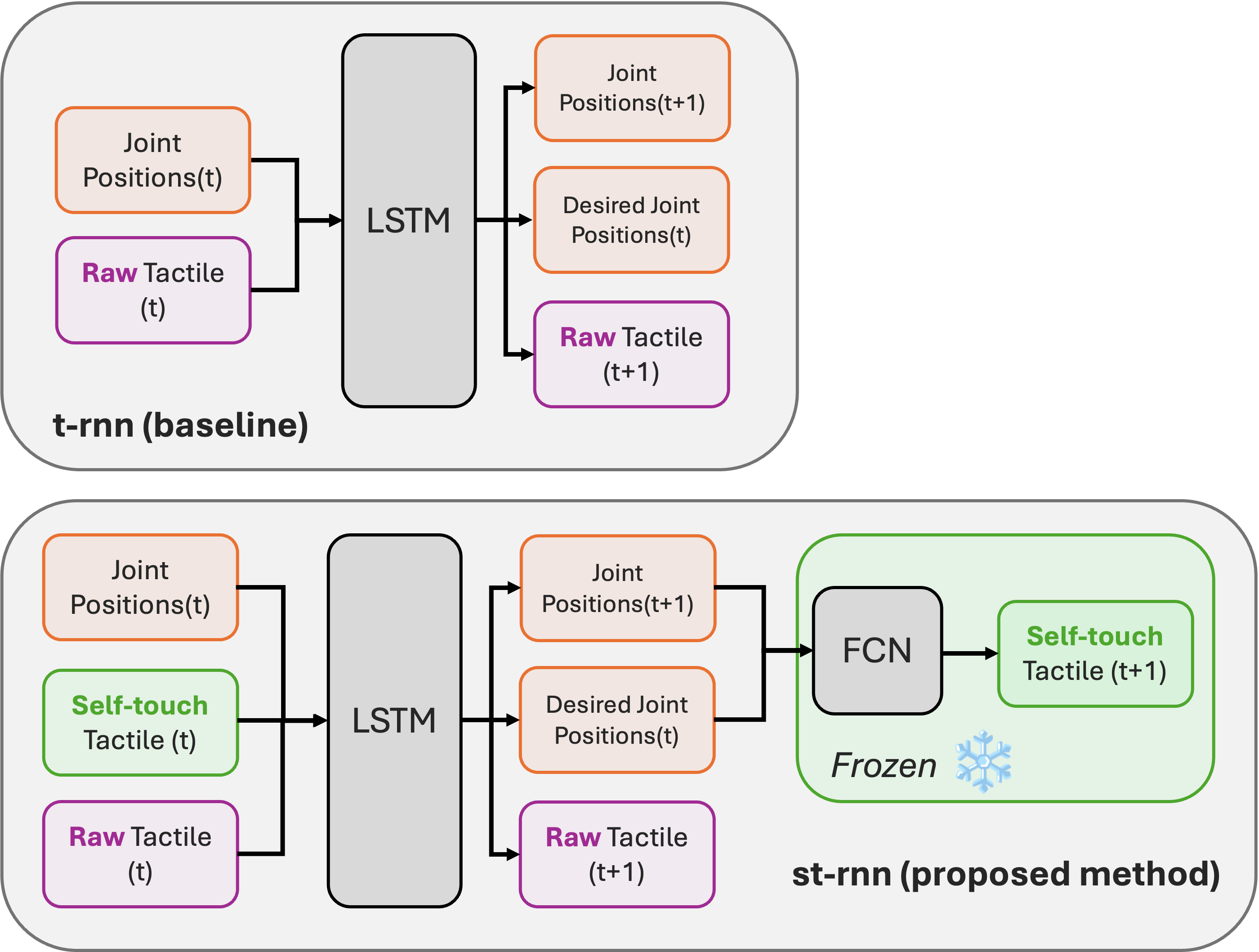
Существующие методы роботизированной манипуляции, такие как модели CNN-LSTM, часто испытывают трудности при эффективном использовании тонких тактильных сигналов, возникающих при контакте пальцев друг с другом и с ладонью. Это ограничивает возможности роботов в выполнении сложных задач, требующих точной координации и адаптации внутри захвата. В то время как роботы могут определять, что они касаются, им сложно интерпретировать как именно они это касаются — нюансы давления, скольжения и деформации — что критически важно для стабильной и надежной манипуляции объектами. Неспособность полноценно использовать эту информацию препятствует развитию сложных навыков, таких как перекладывание предмета из одной руки в другую или вращение объекта в пределах захвата, что значительно снижает гибкость и применимость роботов в реальных условиях.
Для успешного выполнения сложных задач роботам необходимо не просто распознавать, что они касаются, но и понимать, как ощущаются собственные действия. Исследования показывают, что эффективная манипуляция требует от робота способности интерпретировать проприоцептивные сигналы — информацию о положении и движении его собственных «рук». Это означает, что робот должен уметь различать тонкие изменения в давлении, трении и деформации, возникающие при выполнении действий, таких как перекладывание предмета в руке или вращение его. Способность понимать «ощущения» от собственных действий позволяет роботу адаптироваться к неопределенностям, корректировать хват и предотвращать падение предметов, что является ключевым фактором для достижения человекоподобной ловкости и надежности в реальных условиях.
Моделирование руки: предвидение и подавление самоприкосновений
Феномен сенсорной аттенуации (СА) — снижение веса предсказуемых сенсорных последствий — играет ключевую роль в эффективности человеческих движений, позволяя мозгу фокусироваться на значимых внешних стимулах. Этот механизм позволяет игнорировать сенсорный шум, вызванный собственными действиями, и оперативно реагировать на неожиданные внешние воздействия. Перенос принципов СА в робототехнику позволяет создавать более эффективные системы, способные отличать самовозбужденные ощущения от внешнего контакта, что критически важно для выполнения точных и скоординированных движений в сложных условиях и снижения вычислительной нагрузки, связанной с обработкой всех сенсорных данных.
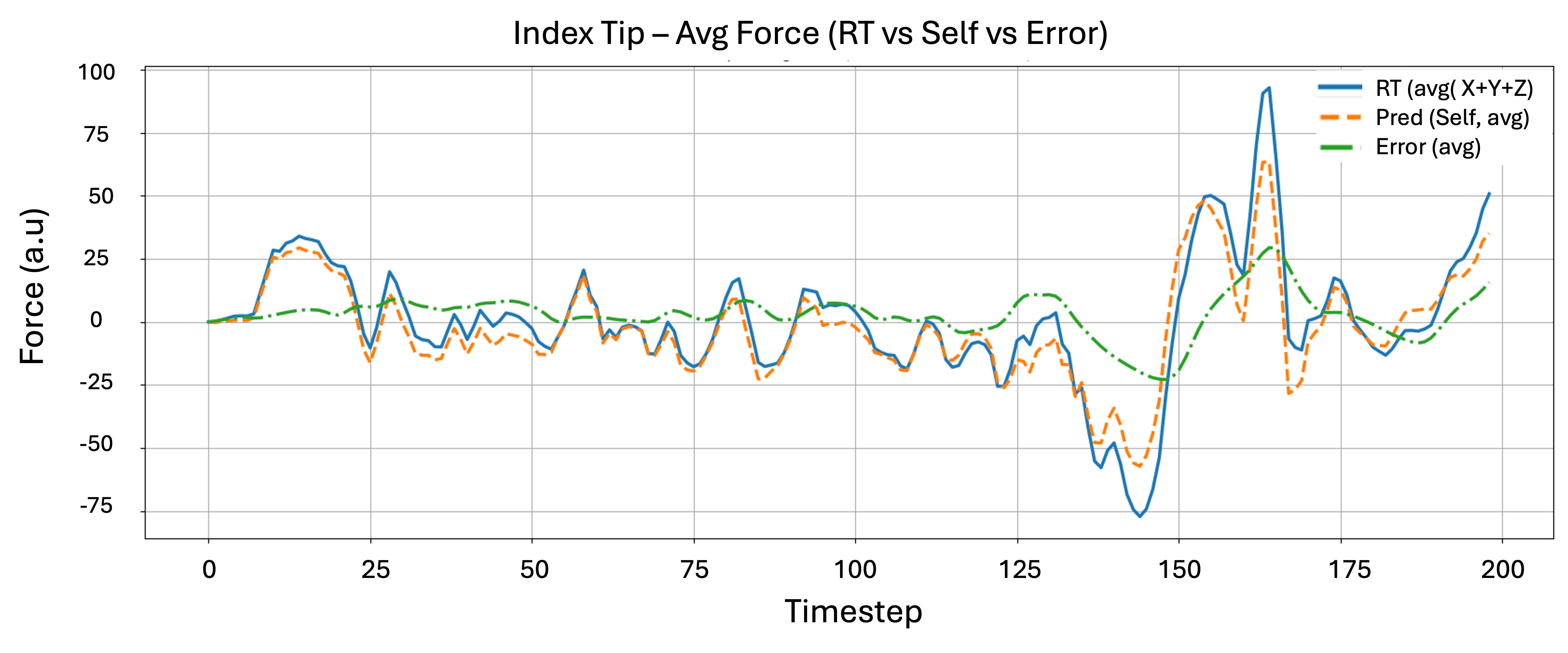
Фреймворк TaSA (Tactile Self-Attention) представляет собой систему, явно моделирующую взаимодействие робота с самим собой и предсказывающую тактильную обратную связь. Он позволяет роботу отличать внешние контакты от собственных действий, основываясь на предсказании ожидаемых тактильных ощущений. В рамках TaSA, текущая конфигурация суставов робота используется для прогнозирования тактильных ощущений, которые должны возникнуть при отсутствии внешних воздействий. Расхождение между предсказанными ощущениями и фактической тактильной обратной связью указывает на наличие внешнего контакта, позволяя роботу сосредоточиться на релевантных стимулах и игнорировать самовозбуждение.
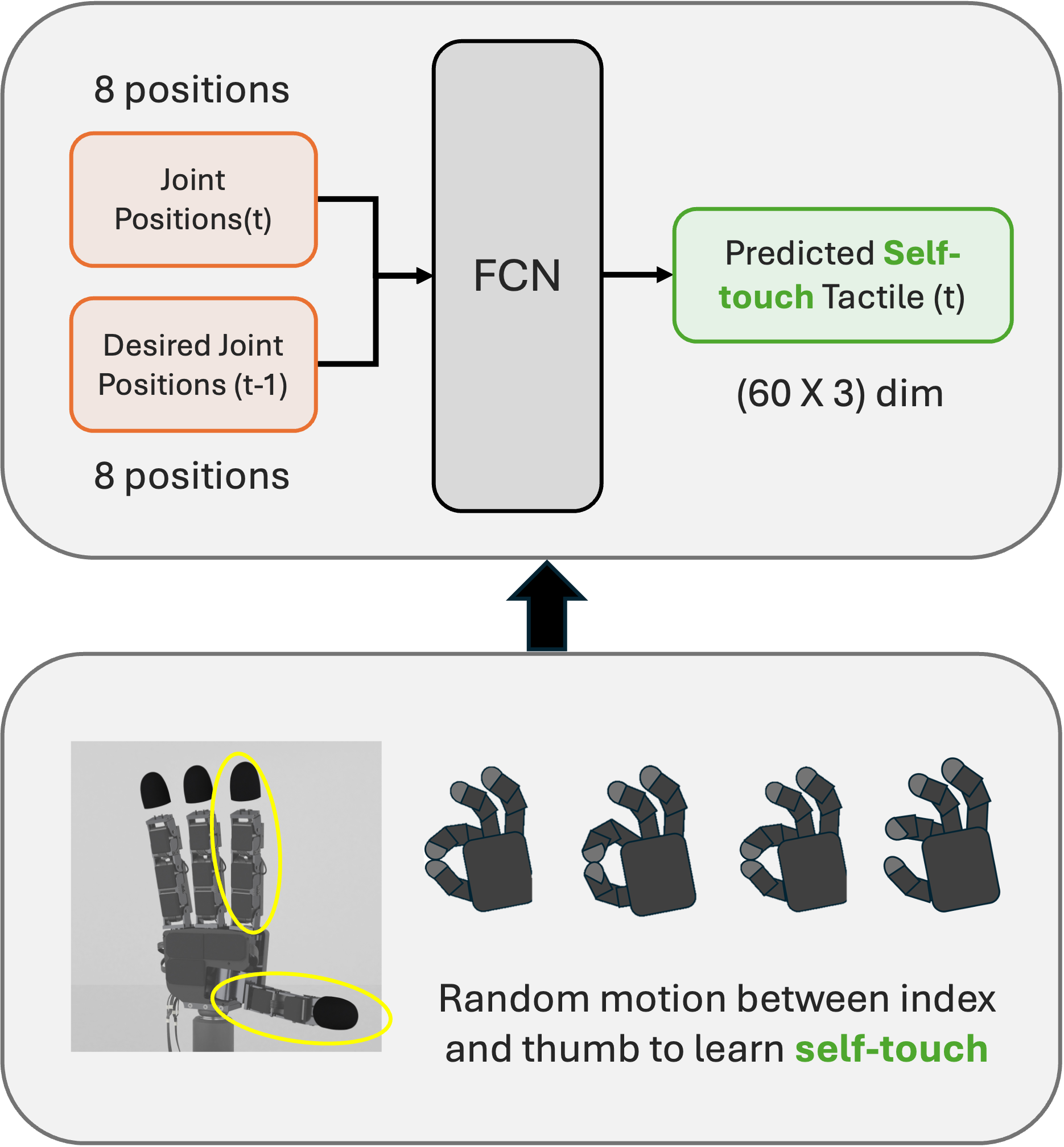
В рамках TaSA Framework, полносвязная нейронная сеть (FCN) играет ключевую роль в прогнозировании тактильной обратной связи на основе конфигурации суставов робота. FCN обучается сопоставлять текущее положение суставов с ожидаемыми тактильными ощущениями, формируя модель предсказания. Этот процесс включает в себя использование данных о взаимном расположении звеньев робота и их влиянии на тактильные сенсоры. Обученная FCN позволяет предсказывать тактильную обратную связь, что необходимо для реализации механизма сенсорной аттенуации и фильтрации самовоздействий.
Предсказывающая способность робота позволяет ему эффективно отфильтровывать несущественные самогенерируемые ощущения, концентрируясь на внешних стимулах. Этот процесс реализуется путем сравнения предсказанных тактильных ощущений, основанных на текущей конфигурации суставов робота, с фактически полученными сенсорными данными. Расхождение между предсказанием и реальностью указывает на внешнее взаимодействие, в то время как минимальное расхождение подтверждает, что ощущение вызвано собственными движениями робота. Таким образом, система снижает значимость предсказанных сенсорных сигналов, что позволяет выделить и обработать только информацию, поступающую от внешних объектов, повышая эффективность восприятия и реагирования на окружающую среду.
Подтверждение точностью: выполнение сложных задач манипулирования
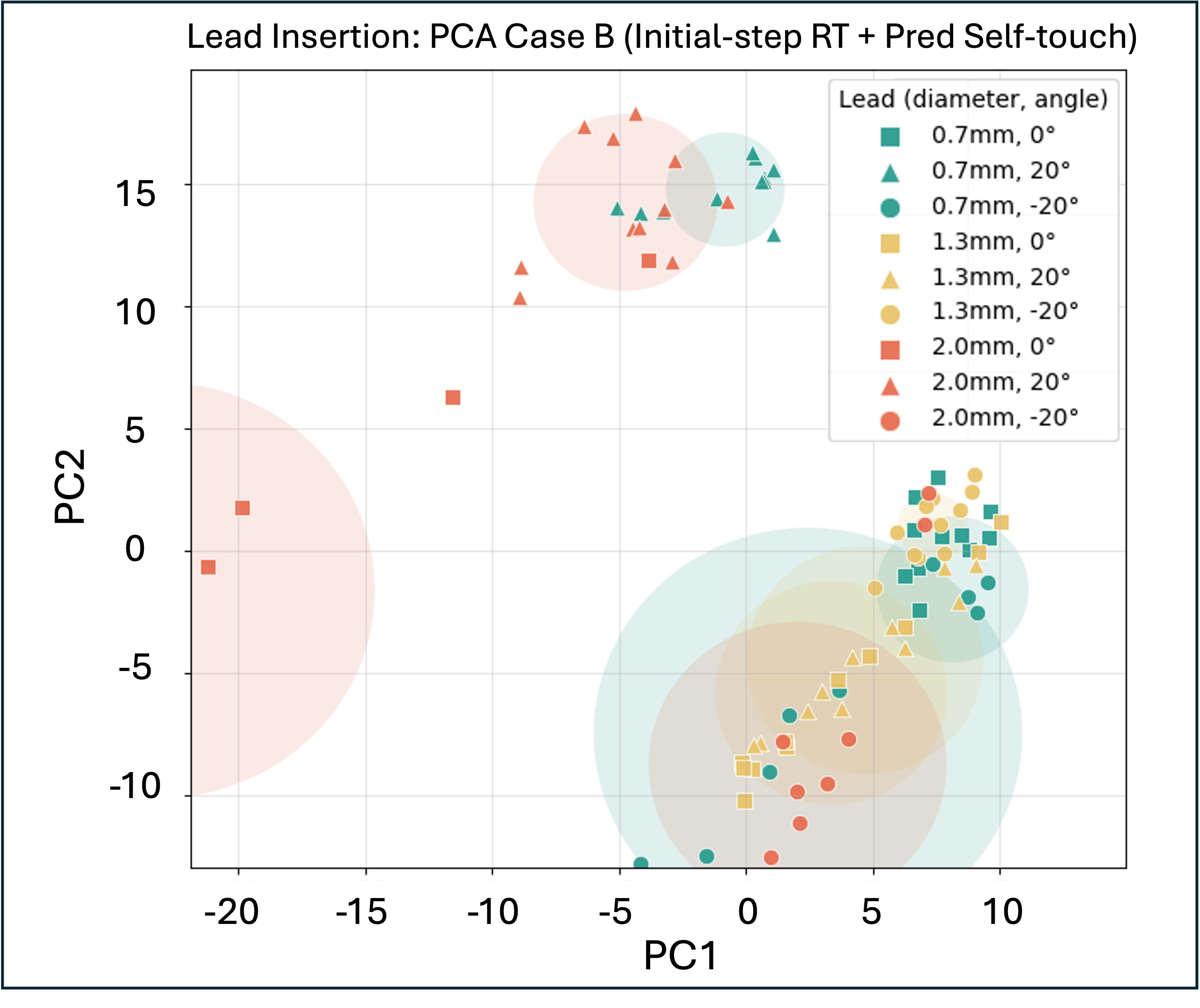
Для всесторонней оценки эффективности разработанного фреймворка TaSA, проводилось тестирование на ряде задач, требующих высокой точности манипулирования. В частности, использовались такие задачи, как исправление бумажной скрепки, вставка монеты и вставка грифеля карандаша. Эти задачи были выбраны как репрезентативные примеры манипуляций, требующих тонкой моторики и чувствительности к тактильным ощущениям, что позволило оценить способность фреймворка к обработке и интерпретации тактильных данных в сложных условиях.
Для визуализации и анализа пространства признаков тактильных данных применялся метод главных компонент (PCA). Этот анализ позволил оценить эффективность разработанного фреймворка TaSA, выявляя взаимосвязи между тактильными ощущениями и успешностью выполнения задач. Использование PCA позволило снизить размерность данных, сохранив при этом наиболее значимые признаки, что облегчило интерпретацию и позволило идентифицировать конкретные тактильные характеристики, наиболее важные для успешного манипулирования объектами. Результаты анализа пространства признаков были использованы для оптимизации алгоритмов обработки тактильных данных и улучшения общей производительности системы.
Результаты тестирования фреймворка на задачах точной манипуляции продемонстрировали существенное повышение эффективности. В частности, успешность выполнения задачи по исправлению скрепки увеличилась до 95% по сравнению с 70% при использовании только необработанных тактильных данных. Успешность вставки монеты составила 92% против 68%, а в задаче по вставке грифеля карандаша был достигнут показатель в 58%, что значительно превышает 26% при использовании необработанных данных. Данные результаты подтверждают эффективность предложенного подхода к обработке тактильной информации для задач роботизированной манипуляции.
Применение самообучающегося предварительного обучения в сочетании с разработанной структурой TaSA позволило значительно улучшить способность робота к формированию устойчивых тактильных представлений в процессе игровых взаимодействий. Этот подход предполагает, что робот самостоятельно извлекает информацию из тактильных ощущений, получаемых в ходе свободной игры с объектами, что позволяет ему учиться без необходимости в размеченных данных. В результате, система демонстрирует повышенную устойчивость к шумам и вариациям в тактильных сигналах, что критически важно для успешного выполнения сложных манипулятивных задач и повышения общей эффективности робота в реальных условиях.
К адаптивной робототехнике: расширение возможностей
Разработанная платформа TaSA демонстрирует значительный прогресс в области адаптивной робототехники, позволяя роботам эффективно моделировать и подавлять ощущение самоприкосновения. Этот механизм критически важен для повышения надежности манипуляций, поскольку позволяет различать преднамеренные действия от случайного контакта с собственным телом. Способность отличать внешние взаимодействия от самовоздействия значительно уменьшает количество ложных срабатываний и повышает точность управления, особенно в сложных и динамичных средах. В результате, роботы, использующие TaSA, способны выполнять задачи с большей стабильностью и уверенностью, открывая новые возможности для автоматизации в различных областях, от сборки и обслуживания до здравоохранения и исследований.
Принципы, заложенные в основу разработанной системы, обладают значительным потенциалом для адаптации к разнообразным роботизированным платформам и задачам. От точной сборки сложных механизмов и проведения профилактического обслуживания до выполнения деликатных манипуляций в сфере здравоохранения и автономной навигации в экстремальных условиях — универсальность подхода позволяет интегрировать его в самые разные сферы применения. Возможность прогнозирования и подавления самовоздействия открывает путь к созданию более надежных и эффективных роботов, способных работать в динамичной и непредсказуемой среде, будь то конвейер промышленного производства или отдаленные уголки космоса. Данная гибкость делает систему перспективной основой для создания действительно адаптивных роботов, способных решать широкий спектр задач с высокой точностью и безопасностью.
Интеграция разработанного подхода с усовершенствованными тактильными сенсорами, такими как uSkin Sensor, открывает новые возможности для повышения восприятия и управления роботами. Улучшенные тактильные датчики предоставляют более детальную и точную информацию о контакте с окружающей средой, которую система TaSA может эффективно использовать для прогнозирования и подавления самоприкосновений. Это сочетание позволяет роботам более уверенно взаимодействовать с объектами, адаптироваться к различным условиям и выполнять сложные манипуляции с повышенной точностью и надежностью. Усиление тактильной обратной связи не только улучшает способность робота различать собственные движения от внешних воздействий, но и способствует развитию более естественных и интуитивно понятных алгоритмов управления, расширяя сферу применения робототехники в таких областях, как сборка, здравоохранение и исследование окружающей среды.
Проведенные измерения показали высокую точность предсказания самоприкосновений роботизированной рукой. В ходе экспериментов, величина ошибки предсказания для большого пальца составила от 88 до 1010 условных единиц, а для указательного — от 2525 до 3030 у.е. Эти показатели значительно ниже, чем типичная величина самоконтакта, которая для большого пальца составила 4040-5050 у.е., а для указательного — 6060-7070 у.е. Такое существенное различие подтверждает эффективность разработанной модели в прогнозировании нежелательных самоприкосновений, что является важным шагом к созданию более адаптивных и надежных роботизированных систем.
Дальнейшие исследования направлены на расширение возможностей разработанной системы, чтобы она могла успешно функционировать в более сложных и непредсказуемых ситуациях. Особое внимание уделяется разработке алгоритмов, способных к обучению на ограниченном объеме данных — это критически важно для практического применения робототехники в реальных условиях, где сбор большого количества обучающих примеров может быть затруднен или невозможен. Планируется усовершенствовать систему, чтобы она могла адаптироваться к различным типам объектов, переменным условиям окружающей среды и непредсказуемым взаимодействиям, обеспечивая тем самым более надежную и гибкую работу роботов в широком спектре задач.
Исследование, представленное в данной работе, демонстрирует, что эффективное манипулирование предметами роботом требует не только точного восприятия внешних контактов, но и способности отличать их от самовоздействия. Данный подход, основанный на предсказании тактильных затуханий, напоминает принцип целостности системы, где понимание взаимодействия всех частей необходимо для достижения стабильности. Как однажды заметил Дональд Дэвис: «Архитектура — это поведение системы во времени, а не схема на бумаге». В контексте робототехники это означает, что успешная система манипулирования формируется не только из отдельных сенсоров и алгоритмов, но и из их способности предсказывать и учитывать динамику взаимодействия, что позволяет системе адаптироваться и эффективно функционировать в реальном времени.
Куда Далее?
Представленная работа, касающаяся предсказания самоприкосновений и аттенюации сенсорных сигналов, выявляет не столько решение, сколько обнажение глубины проблемы. Успешное применение TaSA указывает на то, что надежное манипулирование объектами требует не просто регистрации внешних воздействий, но и тонкого понимания собственной телесности робота. Однако, текущий подход, вероятно, сильно зависит от специфики используемых сенсоров и кинематики манипулятора. Переход к более общим, адаптивным системам, способным обучаться на различных платформах, остается открытым вопросом.
Очевидным направлением дальнейших исследований представляется интеграция предсказательных моделей с более сложными системами планирования движений. Вместо простой фильтрации сигналов, можно представить себе систему, активно использующую предсказание самоприкосновений для оптимизации траекторий и предотвращения нежелательных контактов. Но, как часто бывает, изящная архитектура системы проявится лишь в моменты ее сбоя, когда станет оченой истинный масштаб принятых решений.
В конечном счете, истинный прогресс в области роботизированной манипуляции, вероятно, потребует не просто усовершенствования сенсорных систем и алгоритмов, но и переосмысления самой концепции «осязания» для роботов. Понимание, что “чувство” — это не пассивное получение информации, а активный процесс взаимодействия с миром, может привести к созданию систем, способных к действительно гибкому и надежному манипулированию.
Оригинал статьи: https://arxiv.org/pdf/2602.05468.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Acer Aspire 5 Spin 14 ОБЗОР
- Huawei nova 15 Max ОБЗОР
- 10 лучших OLED ноутбуков. Что купить в мае 2026.
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
- Honor 600 ОБЗОР: отличная камера, объёмный накопитель, плавный интерфейс
- Российский рынок: дефляция, рубль и геополитика – обзор ключевых событий недели (06.05.2026 19:32)
- Xiaomi Redmi 10C ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков
- Oppo Find X9s Pro ОБЗОР: скоростная зарядка, современный дизайн, замедленная съёмка видео
- Wiko Hi Enjoy 60s ОБЗОР: быстрый сенсор отпечатков, большой аккумулятор
- ВИ.РУ акции прогноз. Цена VSEH
2026-02-06 19:17