Автор: Денис Аветисян
Исследователи предлагают метод, позволяющий моделям лучше понимать пространственные отношения в окружающем мире, отделив объективное описание сцены от субъективной точки зрения.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"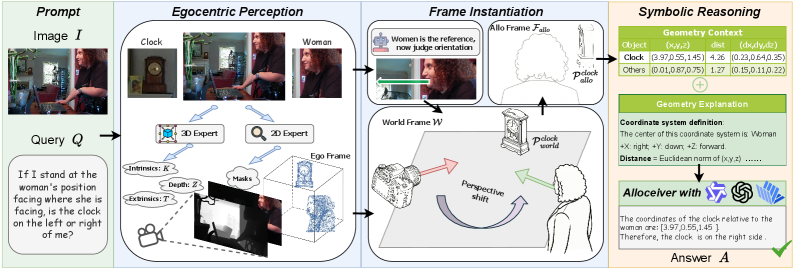
Представлен фреймворк Allocentric Perceiver, расширяющий возможности моделей «зрения и языка» в области пространственного рассуждения посредством динамических преобразований координат и геометрических подсказок.
Несмотря на прогресс в области пространственного понимания, языковые модели с визуальным вводом часто демонстрируют хрупкость при решении задач, требующих отхода от привычной, эгоцентричной перспективы. В работе ‘Allocentric Perceiver: Disentangling Allocentric Reasoning from Egocentric Visual Priors via Frame Instantiation’ предложен метод, позволяющий отделить аллоцентрическое рассуждение от влияния эгоцентричных визуальных представлений, используя динамическое преобразование координат и геометрическое представление данных. Ключевой особенностью подхода является способность восстанавливать метрические 3D-сцены и преобразовывать их в систему координат, ориентированную на запрос, что позволяет модели рассуждать в целевой системе отсчета. Способен ли этот подход открыть новые горизонты в создании действительно пространственно осведомленных систем искусственного интеллекта?
Преодолевая Ограничения Эгоцентричного Восприятия
Современные системы искусственного интеллекта, подобно человеку, зачастую полагаются на эгоцентрическое восприятие окружающего мира — построение понимания пространства относительно собственного положения. Такой подход, хотя и эффективен для непосредственного взаимодействия с ближайшим окружением, существенно ограничивает возможности более широкого пространственного рассуждения. Вместо построения абсолютной карты пространства, ИИ склонен интерпретировать объекты и их взаимосвязи в терминах «слева», «справа», «впереди» относительно себя, что создает трудности при анализе сложных сцен или при необходимости представить себе пространство независимо от текущей точки обзора. Это ограничивает способность системы к планированию маршрутов, пониманию инструкций, заданных с другой перспективы, и, в конечном итоге, к полноценному взаимодействию со сложным миром.
Современные системы искусственного интеллекта, подобно человеку, часто сталкиваются с проблемой “разрыва систем отсчета” при анализе пространственных взаимосвязей. Этот разрыв возникает, когда необходимо рассуждать о пространстве независимо от текущей точки зрения или непосредственного наблюдения. Вместо объективного понимания окружающей среды, система склонна привязывать все к собственной перспективе, что затрудняет построение целостной и точной модели пространства. Представьте, что необходимо описать расположение предметов в комнате, не находясь в ней физически — система, испытывающая этот разрыв, будет испытывать значительные трудности, поскольку не сможет эффективно переключаться между различными системами координат и оперировать абстрактными пространственными представлениями. Это ограничивает возможности ИИ в задачах навигации, планирования и понимания сложных сцен, требующих способности к независимому пространственному рассуждению.
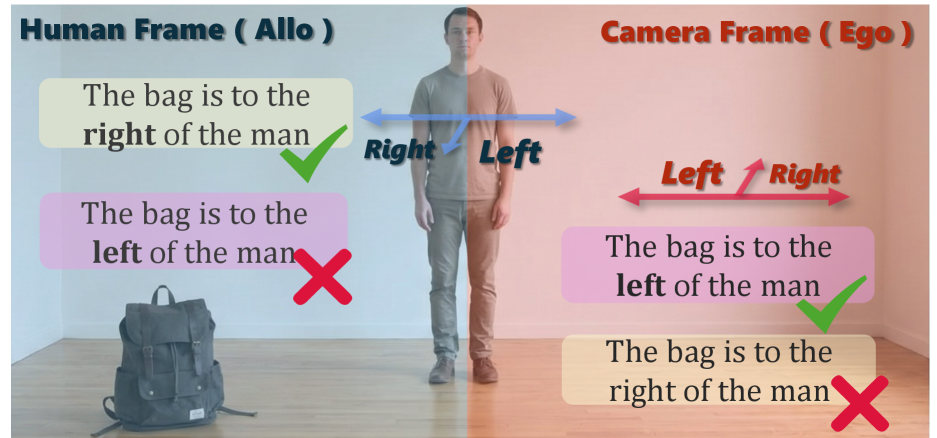
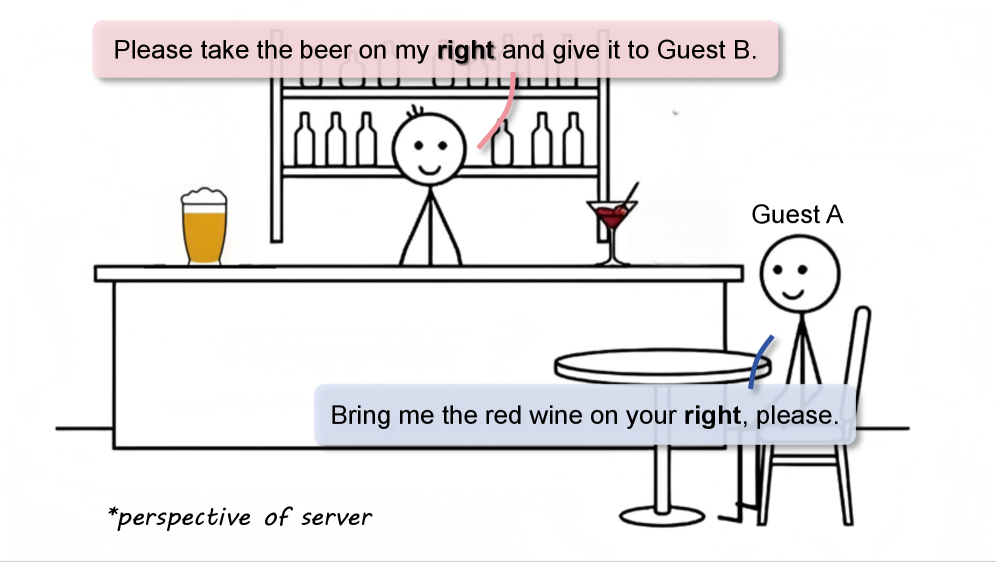
Визуально-семантическая неоднозначность возникает, когда искусственный интеллект пытается интерпретировать пространственные отношения, рассматривая их с различных точек зрения. Данное явление существенно затрудняет формирование надежного понимания окружающей среды, поскольку один и тот же визуальный образ может допускать несколько различных интерпретаций в зависимости от перспективы наблюдателя. Например, объект, находящийся «справа» для одного наблюдателя, может оказаться «слева» для другого, что требует от системы способности абстрагироваться от собственной точки зрения и учитывать контекст. Отсутствие этой способности приводит к ошибкам в понимании взаимосвязей между объектами и, как следствие, к снижению эффективности работы систем компьютерного зрения в реальных условиях, особенно в динамичных и сложных сценариях.
Alloceiver: Отделение Восприятия от Ориентации
Alloceiver — это разработанный нами фреймворк, предназначенный для отделения пространственного понимания от эгоцентричных визуальных предубеждений, что позволяет реализовать истинное аллоцентрическое рассуждение. Традиционные системы часто интерпретируют окружающую среду относительно собственной точки зрения, что ограничивает их способность к обобщению и решению задач, требующих независимого от наблюдателя анализа. Alloceiver, в отличие от них, стремится создать представление об окружении, не зависящее от позиции и ориентации агента, позволяя проводить более надежные и точные пространственные умозаключения, особенно в сложных и динамичных сценариях. Этот подход позволяет системе оперировать объектами и их взаимоотношениями в абсолютных координатах, а не относительно себя.
Аллосивер использует метод «Метрически-ориентированное эгоцентрическое восприятие» для преобразования двумерных визуальных данных во трехмерное облако точек, формируя базовое представление об окружающей среде. Этот процесс включает в себя реконструкцию трехмерной геометрии сцены на основе анализа визуальной информации, полученной с точки зрения агента. Полученное облако точек содержит информацию о положении и размерах объектов в пространстве, что позволяет системе выполнять дальнейшие пространственные рассуждения и планирование действий независимо от текущей точки зрения агента. В результате формируется метрически точное представление пространства, необходимое для решения сложных задач, требующих понимания геометрии сцены.
Динамическое построение системы отсчета (Dynamic Frame Instantiation) в Alloceiver создает аллоцентрическую (независимую от наблюдателя) систему координат, ориентированную на конкретный запрос пользователя. Это позволяет системе выполнять пространственное рассуждение, не зависящее от текущей точки зрения. В ходе экспериментов было установлено, что применение данной технологии обеспечивает прирост общей точности до 30,08% при решении сложных пространственных задач, демонстрируя значительное улучшение в задачах, требующих понимания относительного расположения объектов вне зависимости от позиции наблюдателя.
Оценка Возможностей Пространственного Рассуждения
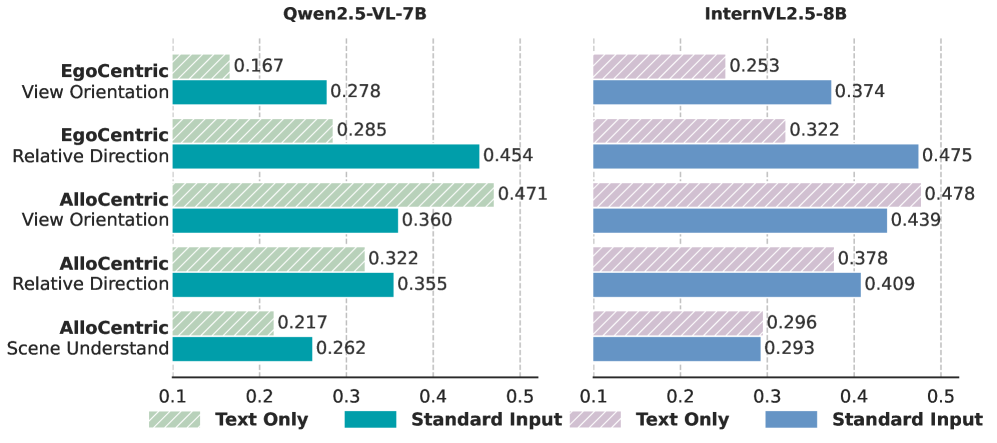
Для строгой оценки возможностей пространственного рассуждения Alloceiver использовались специализированные наборы данных ViewSpatial-Bench и 3DSRBench. ViewSpatial-Bench содержит задачи, требующие анализа сцен из различных точек зрения, что позволяет оценить способность модели к многоперспективному пространственному анализу. 3DSRBench, в свою очередь, сконцентрирован на задачах, требующих понимания и рассуждений о трехмерных структурах и отношениях между объектами в 3D-пространстве. Использование этих наборов данных обеспечивает комплексную оценку способностей модели к решению задач, требующих как 2D, так и 3D пространственного мышления.
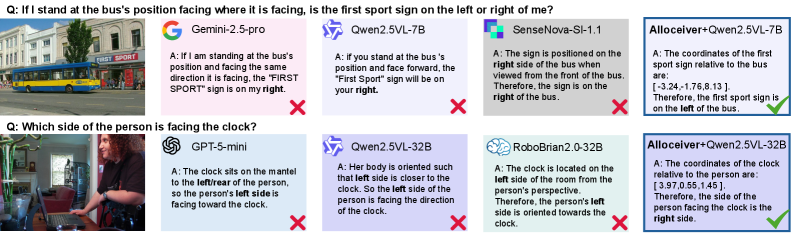
В ходе оценки производительности Alloceiver на allocentric задачах, было зафиксировано значительное превосходство над базовыми Vision-Language моделями. В частности, точность Alloceiver превысила показатели Qwen2.5VL-7B на 8.33%, Qwen2.5VL-32B на 10.84%, InternVL2.5-38B на 10.73% и GPT-4o на 10.98%. Эти результаты демонстрируют улучшенные возможности Alloceiver в задачах, требующих понимания пространственных отношений и ориентации объектов.
Интеграция символьного геометрического рассуждения значительно повышает способность Alloceiver решать сложные пространственные задачи. На конкретном примере задачи ‘Orient. Left’ наблюдается улучшение точности на 16.05% по сравнению с моделью Qwen2.5-VL-7B и на 30.08% по сравнению с InternVL2.5-38B. Данный прирост точности демонстрирует эффективность использования символьных представлений геометрии для улучшения понимания и решения пространственных задач в рамках архитектуры Alloceiver.
Перспективы и Направления Дальнейших Исследований
Способность Alloceiver создавать согласованное аллоцентрическое представление — трехмерное облако точек — открывает значительные перспективы для разработки более надежных и обобщенных систем искусственного интеллекта. В отличие от систем, ориентированных на собственные ощущения, Alloceiver строит модель окружающего пространства, независимую от текущей позиции и ориентации, что позволяет ему эффективно обобщать знания и адаптироваться к новым условиям. Такой подход обеспечивает устойчивость к изменениям точки зрения и освещения, а также позволяет системе предсказывать и планировать действия в сложном окружении. Построение детальной и согласованной трехмерной модели мира становится основой для более эффективного восприятия, понимания и взаимодействия с окружающей действительностью, что является ключевым шагом на пути к созданию действительно интеллектуальных машин.
Фундаментальная зависимость предложенной архитектуры от точности методов оценки глубины и положения головы открывает широкие перспективы для дальнейшей оптимизации и усовершенствования системы. Повышение надежности алгоритмов оценки глубины, например, за счет использования более сложных моделей или интеграции данных из различных сенсоров, напрямую влияет на качество формируемого трехмерного представления окружающего пространства. Аналогично, улучшение алгоритмов определения положения головы, возможно, с использованием нейронных сетей, способных к более точной калибровке и компенсации движений, позволит создать более устойчивую и эффективную систему восприятия. Внедрение новых подходов к обработке ошибок и повышению робастности этих базовых компонентов станет ключевым фактором в создании действительно универсального и адаптивного искусственного интеллекта.
Предстоящие исследования направлены на внедрение Alloceiver в задачи реальной робототехники, что позволит значительно повысить эффективность навигации и взаимодействия роботов с окружающей средой. Разработчики планируют испытать систему в сложных сценариях, требующих адаптации к динамически меняющимся условиям и распознавания объектов. Ожидается, что благодаря созданию последовательного аллоцентрического представления пространства, роботы, использующие Alloceiver, смогут более надежно ориентироваться и выполнять поставленные задачи даже в незнакомых локациях. Это открывает перспективы для создания автономных роботов-помощников, способных эффективно функционировать в различных сферах, от домашнего хозяйства до промышленного производства и поисково-спасательных операций.
Исследование, представленное в данной работе, демонстрирует важность отделения аллоцентрического мышления от эгоцентрических визуальных предубеждений для улучшения пространственного рассуждения в моделях «зрение-язык». Этот подход, основанный на динамических преобразованиях координат и геометрических подсказках, позволяет моделям более эффективно интерпретировать визуальную информацию, не ограничиваясь перспективой наблюдателя. Как однажды заметил Ян ЛеКун: «Машинное обучение — это просто поиск закономерностей». Действительно, представленная методика «Allocentric Perceiver» нацелена на выявление и использование скрытых закономерностей в пространственных данных, что позволяет модели преодолеть ограничения, связанные с фиксированной точкой зрения и улучшить способность к обобщению и геометрическому рассуждению. Если закономерность нельзя воспроизвести или объяснить, её не существует.
Что дальше?
Представленный подход, хотя и демонстрирует способность отделить аллоцентрическое рассуждение от эгоцентрических предубеждений, не решает фундаментальный вопрос о природе репрезентации пространства в нейронных сетях. Насколько эффективно динамические преобразования координат действительно «раскрывают» аллоцентрическое понимание, или же это лишь искусное манипулирование признаками, маскирующее отсутствие истинного пространственного восприятия? Очевидно, что необходимо более глубокое исследование того, как модели «видят» пространство — не просто кодируют ли они относительные расстояния и углы, или способны к формированию более абстрактных, инвариантных представлений.
Особое внимание следует уделить влиянию неполноты данных и шумов. Реальные визуальные сцены редко предоставляют идеальную информацию, и способность модели к обобщению в условиях неопределенности остается критическим вызовом. Необходимо изучить, как различные типы шумов влияют на точность преобразований координат и, следовательно, на качество аллоцентрического рассуждения. Игнорирование этих факторов может привести к переоценке практической применимости предложенного подхода.
В конечном счете, прогресс в этой области потребует не только улучшения алгоритмов, но и разработки новых метрик для оценки истинного пространственного понимания. Простые тесты на точность координат недостаточны. Необходимо исследовать способность моделей к решению более сложных задач, требующих понимания пространственных отношений, прогнозирования траекторий и планирования действий в динамических средах. Иначе, мы рискуем создать системы, которые хорошо «играют» в тесты, но не способны к реальному взаимодействию с миром.
Оригинал статьи: https://arxiv.org/pdf/2602.05789.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Huawei nova 15 Max ОБЗОР
- Acer Aspire 5 Spin 14 ОБЗОР
- ВИ.РУ акции прогноз. Цена VSEH
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Российский рынок: от оттока наличных к смешанной динамике и ожиданиям ЦБ (07.05.2026 20:32)
- Nikon D7200
- Honor 600 ОБЗОР: отличная камера, объёмный накопитель, плавный интерфейс
- Что купить фотографу. Рекомендации
- Российский рынок: дефляция, рубль и геополитика – обзор ключевых событий недели (06.05.2026 19:32)
2026-02-07 10:20