Автор: Денис Аветисян
Исследователи предлагают новый подход к отслеживанию движений рук, позволяющий системе корректно работать с перчатками различных дизайнов и материалов.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"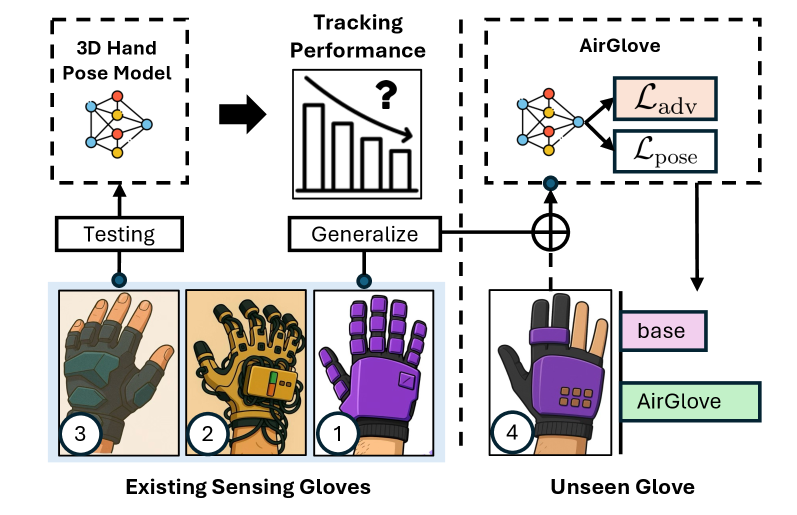
Представлен фреймворк AirGlove, использующий состязательное обучение для создания инвариантных к внешнему виду представлений, улучшающих обобщение моделей 3D-трекинга рук.
Несмотря на успехи в отслеживании движений рук, существующие системы компьютерного зрения часто испытывают трудности при работе с сенсорными перчатками из-за различий во внешнем виде. В данной работе, ‘AirGlove: Exploring Egocentric 3D Hand Tracking and Appearance Generalization for Sensing Gloves’, исследуется проблема обобщения моделей отслеживания рук на сенсорные перчатки различных типов. Предложена система AirGlove, использующая состязательное обучение для получения инвариантных к внешнему виду представлений, что позволяет значительно повысить точность отслеживания на новых перчатках. Сможет ли подобный подход стать основой для создания более надежных и универсальных систем телеуправления и обучения роботов?
Точность в движении: вызовы и перспективы отслеживания рук
Точное отслеживание движений рук является фундаментальной задачей для широкого спектра передовых технологий, включая виртуальную и дополненную реальность, робототехнику и взаимодействие человека с компьютером. Однако, несмотря на значительный прогресс в области сенсорики и вычислительной техники, надежное и точное определение положения и ориентации руки в пространстве по-прежнему представляет собой серьезную проблему. Сложность обусловлена высокой степенью свободы человеческой руки, необходимостью учета динамических деформаций и быстрых движений, а также потребностью в системах, способных работать в различных условиях освещения и окружения. Решение этой задачи открывает возможности для создания более естественных и интуитивно понятных интерфейсов, а также для повышения эффективности и безопасности работы роботов и автоматизированных систем.
Традиционные методы отслеживания движений рук, в частности оптические системы захвата движения, несмотря на свою точность в лабораторных условиях, часто оказываются непрактичными для реальных применений. Эти системы, как правило, требуют сложной настройки, специализированного освещения и громоздкого оборудования, что значительно ограничивает их мобильность и делает дорогостоящими в установке и обслуживании. Более того, они испытывают трудности в динамически меняющихся средах, где возникают помехи от освещения, препятствий или быстрых движений, что приводит к потере отслеживания и снижению общей надежности. В результате, применение оптических систем в областях, требующих свободы передвижения или работы в неконтролируемых условиях, оказывается затруднительным, что стимулирует поиск альтернативных, более компактных и устойчивых решений.
Существующие перчатки с датчиками, такие как IMU-Glove и перчатки с датчиками давления, предоставляют определенные данные о движениях руки, однако сталкиваются с проблемой дрейфа — постепенного накопления ошибок, искажающих точность отслеживания. Кроме того, они часто не способны обеспечить полноценную трехмерную оценку положения руки в пространстве, что значительно снижает качество распознавания жестов и действий по сравнению с отслеживанием движений «голой» руки, как показано в таблице 2. Эта неспособность к точному и непрерывному отслеживанию ограничивает их применение в требовательных областях, таких как виртуальная и дополненная реальность, а также в робототехнике, где необходима высокая точность и надежность.
Зрение как инструмент отслеживания: возможности и ограничения
Отслеживание положения руки на основе анализа изображений (Vision-Based Hand Tracking) представляет собой альтернативный подход к определению позы руки, использующий камеры и алгоритмы обработки визуальных данных. В процессе обучения такие системы часто используют размеченные данные — “3D Pose Labels”, представляющие собой трехмерные координаты ключевых точек руки (суставов и кончиков пальцев). Эти метки служат основой для обучения моделей машинного зрения, позволяя им распознавать и отслеживать положение руки в пространстве на основе анализа изображений, полученных с камер.
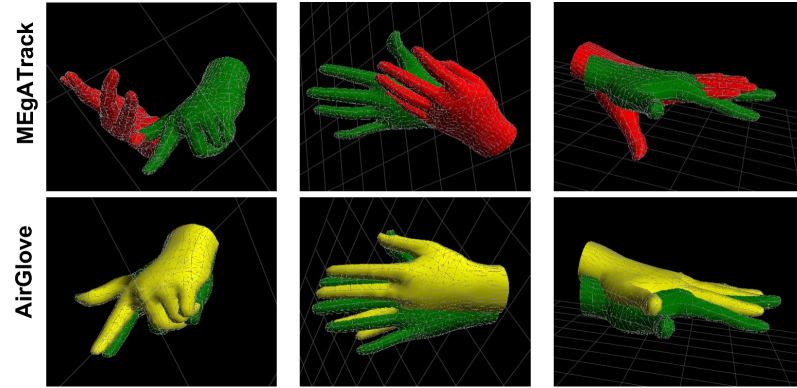
Фреймворки, такие как MEgATrack и UmeTrack, демонстрируют возможность отслеживания в реальном времени, однако их точность существенно зависит от внешних факторов. На производительность систем влияют условия освещения, при котором снижение или избыток света может приводить к ошибкам распознавания. Частичная или полная окклюзия (закрытие) рук объектами также снижает точность отслеживания. Кроме того, вариации во внешнем виде рук — изменение позы, положение относительно камеры, и индивидуальные особенности — могут негативно сказываться на стабильности и надежности определения положения.
Системы отслеживания рук на основе зрения часто требуют тщательной калибровки для обеспечения корректной работы в различных условиях. Однако, в процессе эксплуатации, накапливающиеся ошибки, известные как “дрейф”, приводят к постепенному снижению точности оценки положения руки. Данный дрейф обусловлен погрешностями в алгоритмах обработки изображений, неточностями в определении глубины и другими факторами, что требует периодической повторной калибровки или использования алгоритмов коррекции для поддержания приемлемого уровня точности отслеживания.
AirGlove: обучение представлениям, не зависящим от внешнего вида
Система AirGlove представляет собой новую структуру, предназначенную для обучения представлений движений руки, инвариантных к изменениям её внешнего вида. Это достигается за счет разработки метода, позволяющего извлекать признаки, не зависящие от таких факторов, как освещение, текстура кожи или используемые перчатки. Повышение устойчивости к вариациям внешнего вида критически важно для обеспечения обобщающей способности системы в различных условиях, включая разные среды и пользователей, и способствует более надежной работе в реальных приложениях, требующих точного отслеживания и интерпретации движений руки.
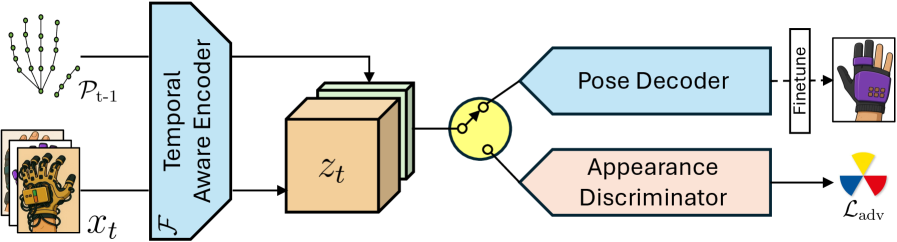
В основе AirGlove лежит метод состязательного обучения (Adversarial Learning), который позволяет сети извлекать признаки, не зависящие от изменений внешнего вида руки. Для этого используется состязательный дискриминатор инвариантности к внешнему виду (Adversarial Appearance-Invariant Discriminator). Этот дискриминатор обучается отличать признаки, полученные от разных вариантов внешнего вида руки (например, разное освещение или текстура кожи), и генерирует сигнал ошибки, который используется для обучения основной сети извлекать признаки, не содержащие информацию о внешнем виде. Таким образом, сеть вынуждена фокусироваться на динамике движения руки, а не на ее визуальных характеристиках, что обеспечивает повышенную робастность и обобщающую способность.
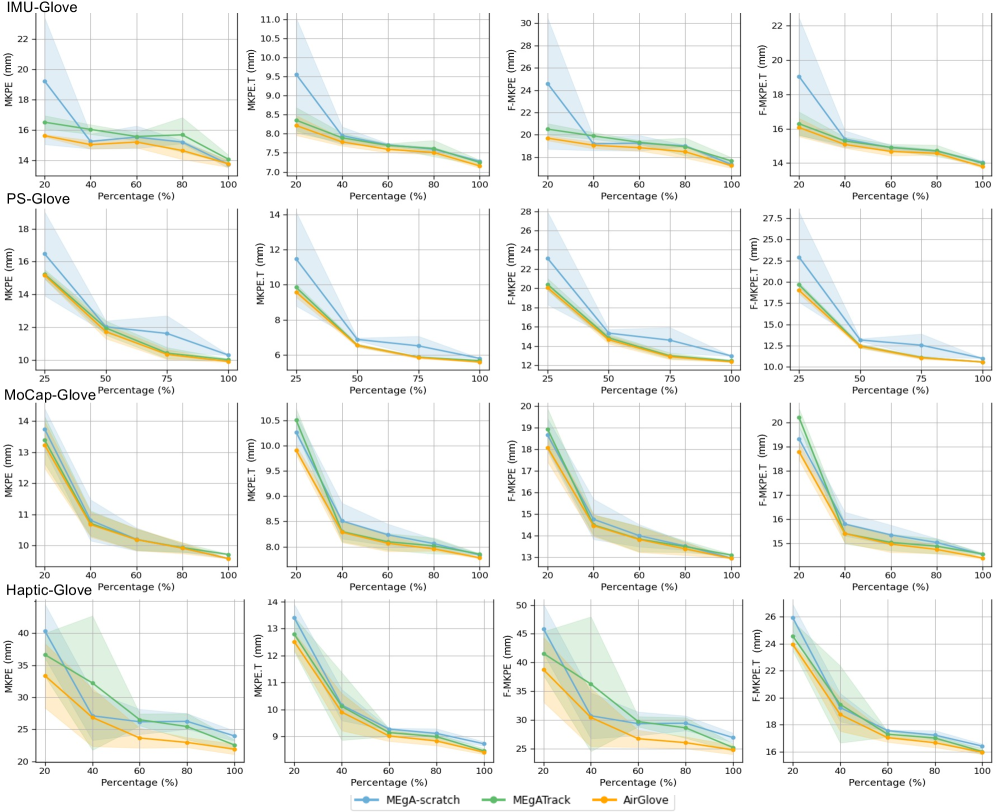
В основе AirGlove лежит сеть TADV-Net, функционирующая как визуальный энкодер, учитывающий временную последовательность движений руки. TADV-Net эффективно захватывает динамику движений и использует метод обучения устойчивого к изменениям внешнего вида представления, что позволяет создавать надежные векторные признаки. Экспериментальные результаты демонстрируют, что AirGlove превосходит базовые методы, о чем свидетельствуют улучшения в метриках MKPE.T и F-MKPE.T (см. рис. 3), подтверждающие эффективность подхода в задачах распознавания и отслеживания движений рук.
Расширение возможностей: влияние и перспективы развития
Технология AirGlove значительно упрощает взаимодействие в виртуальной и дополненной реальности благодаря отделению отслеживания движений рук от визуальных характеристик перчаток. Традиционные системы часто требуют длительной и сложной калибровки для адаптации к различным условиям освещения и внешнему виду используемого оборудования. AirGlove, напротив, позволяет пользователям взаимодействовать с виртуальным миром более естественно и интуитивно, поскольку система не зависит от конкретных визуальных параметров. Это достигается путем фокусировки на самих движениях, а не на внешнем виде устройства, что снижает потребность в постоянной перенастройке и обеспечивает более стабильную и удобную работу в различных сценариях, делая взаимодействие более плавным и реалистичным.
Технология AirGlove открывает новые возможности для повышения эффективности задач манипулирования роботами. Отделяя отслеживание рук от конкретных визуальных характеристик, система позволяет роботам надежно захватывать и перемещать объекты с большей точностью и стабильностью, даже в сложных условиях. Это достигается за счет снижения зависимости от внешнего вида руки, что особенно важно в ситуациях с изменяющимся освещением или частичной видимостью. Повышенная надежность захвата и манипулирования может значительно расширить сферу применения роботов в промышленности, логистике и других областях, где требуется точная и аккуратная работа с предметами.
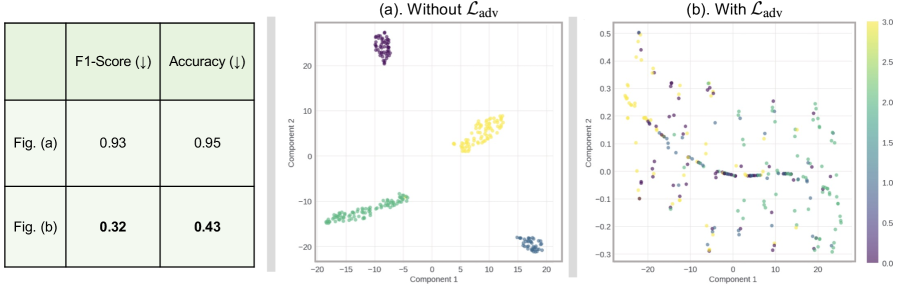
Перспективные исследования направлены на расширение возможностей AirGlove посредством интеграции тактильной обратной связи, используя технологию ‘Haptic-Glove’, что позволит создать более захватывающий и реалистичный пользовательский опыт. Параллельно планируется применение ‘MoCap-Glove’ для получения эталонных данных, необходимых для обучения и повышения точности систем отслеживания движений. Успешное подавление информации, зависящей от внешнего вида перчатки, подтверждено снижением показателей точности и F1-меры при классификации перчаток с использованием функции потерь, направленной на противодействие (см. рис. 5), что свидетельствует о потенциале AirGlove для работы в различных условиях и с различными типами перчаток.
Исследование, представленное в данной работе, демонстрирует стремление к элегантности в решении сложных задач компьютерного зрения. AirGlove, используя состязательное обучение, находит способ абстрагироваться от внешних различий перчаток, фокусируясь на сути — отслеживании движений руки. Как однажды заметил Эндрю Ын: «Машинное обучение — это искусство перевода данных в ценные идеи». Эта фраза прекрасно отражает суть AirGlove, ведь система преобразует визуальную информацию о перчатке в надежные данные о положении руки, несмотря на вариативность внешнего вида. Подобный подход к обучению, стремящийся к инвариантности представлений, является ключом к созданию надежных и универсальных систем отслеживания, способных адаптироваться к новым условиям и дизайну.
Что Дальше?
Представленная работа, безусловно, демонстрирует элегантность подхода к проблеме обобщения в системах отслеживания кисти. Однако, подобно любому хорошо отшлифованному инструменту, AirGlove лишь подчеркивает сложность задачи. Истинное обобщение — не просто игнорирование внешних атрибутов, а понимание лежащих в основе принципов, определяющих форму и функцию. Упор на состязательное обучение — шаг в правильном направлении, но остается открытым вопрос: достаточно ли этого, чтобы преодолеть фундаментальные ограничения, заложенные в самих моделях восприятия?
Будущие исследования, вероятно, должны сместить фокус с простого достижения инвариантности к внешним изменениям на построение моделей, способных к адаптации и самообучению. Необходимо исследовать возможности использования не только визуальной информации, но и тактильных датчиков, инерциальных измерительных блоков, и даже — дерзнем предположить — биометрических данных. Простота — это не отсутствие деталей, а их гармоничное сочетание, и задача состоит в том, чтобы найти баланс между сложностью модели и её способностью к обобщению.
В конечном счете, задача не в том, чтобы создать систему, которая «не замечает» различий, а в том, чтобы система умела извлекать полезную информацию из любого источника, независимо от его внешнего вида. Беспорядок всегда будет существовать, и истинное мастерство заключается в умении находить порядок внутри него. Это не просто техническая задача, это — поиск красоты в несовершенстве.
Оригинал статьи: https://arxiv.org/pdf/2602.05159.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Huawei nova 15 Max ОБЗОР
- ВИ.РУ акции прогноз. Цена VSEH
- Acer Aspire 5 Spin 14 ОБЗОР
- Обзор фотокамеры Nikon D7000
- Realme 15T ОБЗОР: плавный интерфейс, лёгкий, скоростная зарядка
- Ремонтная мастерская обнаружила раннюю ревизию GeForce RTX 4090 Founders Edition с неисправным чипом, отсутствующим на более новых платах.
- Российский рынок: дефляция, рубль и геополитика – обзор ключевых событий недели (06.05.2026 19:32)
- Как фотографировать огонь.
- Nikon D7200
2026-02-08 01:28