Автор: Денис Аветисян
Исследователи разработали систему, позволяющую человекоподобным роботам осваивать сложные задачи манипулирования, используя данные, собранные без непосредственного участия робота.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"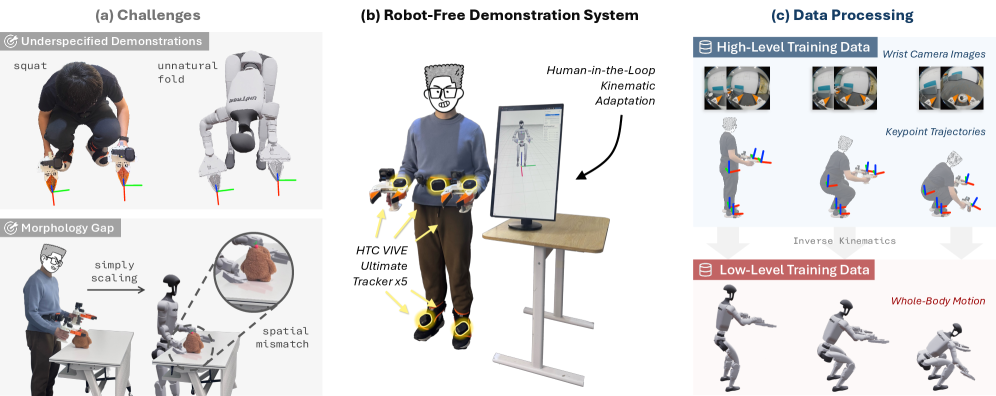
Представлен HuMI — фреймворк для обучения человекоподобных роботов, решающий проблемы воплощения, кинематической осуществимости и ошибок при выполнении задач манипулирования.
Несмотря на значительный прогресс в робототехнике, обучение человекоподобных роботов сложным манипуляциям всё еще требует значительных усилий и ресурсов. В данной работе, представленной под названием ‘Humanoid Manipulation Interface: Humanoid Whole-Body Manipulation from Robot-Free Demonstrations’, предложен новый подход, позволяющий эффективно собирать данные и обучать роботов выполнению целого ряда задач, таких как приседания, ходьба и двуручные манипуляции, без необходимости использования самого робота на этапе сбора данных. Разработанный фреймворк HuMI демонстрирует трехкратное увеличение эффективности сбора данных по сравнению с телеуправлением и достигает 70% успеха в новых условиях. Не откроет ли это путь к более быстрому и экономичному освоению человекоподобными роботами сложных навыков манипулирования в реальном мире?
Сложность движений: вызов для робототехники
Достижение надёжной координации всего тела у человекоподобных роботов остаётся сложной задачей из-за фундаментальной сложности проблемы управления. Каждое движение требует одновременного контроля множества степеней свободы — суставов, мышц и их взаимодействий — что приводит к экспоненциальному росту вычислительной нагрузки и требует разработки алгоритмов, способных справляться с высокой размерностью пространства состояний. Необходимость учитывать динамику движения, контактные взаимодействия с окружающей средой и непредсказуемость реального мира усугубляет проблему, требуя от систем управления не только точности, но и способности к адаптации и робастности. Разработка эффективных стратегий управления, способных обеспечить стабильное и естественное движение человекоподобного робота в различных условиях, остается одной из ключевых задач современной робототехники.
Традиционные методы управления гуманоидными роботами, такие как телеоперация и обучение с подкреплением на основе визуальных данных, часто сталкиваются с серьезными ограничениями при переходе от симуляции к реальному миру и в условиях меняющейся обстановки. Телеоперация, хоть и позволяет роботу выполнять сложные задачи, требует постоянного вмешательства человека и не масштабируется для автономной работы. В свою очередь, обучение с подкреплением, основанное на визуальной информации, испытывает трудности с обобщением полученных навыков на новые, незнакомые ситуации, поскольку робот может быть слишком зависим от конкретных визуальных признаков, которые меняются в реальной среде. Эти подходы часто требуют значительных усилий по адаптации и перенастройке, что существенно ограничивает их применимость в динамичных и непредсказуемых условиях реального мира, подчеркивая необходимость разработки более гибких и устойчивых методов управления.
Применение традиционных методов управления гуманоидными роботами, таких как дистанционное управление и обучение с подкреплением на основе симуляций, часто сталкивается с серьезными ограничениями в реальных условиях. Зачастую, для поддержания стабильной работы и адаптации к меняющейся обстановке требуется постоянное вмешательство человека, что делает систему зависимой от оператора и снижает ее автономность. Кроме того, политики, успешно обученные в виртуальной среде, нередко демонстрируют значительное снижение эффективности при переносе в реальный мир, где присутствуют непредсказуемые факторы и несоответствия между симуляцией и реальностью. Это явление, известное как «разрыв между симуляцией и реальностью», требует разработки новых, более робастных алгоритмов обучения и управления, способных к адаптации и самообучению в динамичной и непредсказуемой среде.
HuMI: Новый подход к обучению роботов
HuMI — это новый подход к сбору данных и обучению для манипуляций всем телом гуманоидными роботами. В отличие от традиционных методов телеоператорского управления, HuMI позволяет увеличить скорость сбора данных в 3 раза. Это достигается за счет создания системы, не требующей непосредственного контроля оператором, что значительно повышает эффективность процесса обучения робота выполнению сложных манипуляций в реальном мире. Основное преимущество заключается в возможности быстрого накопления большого объема данных, необходимых для обучения моделей управления роботом.
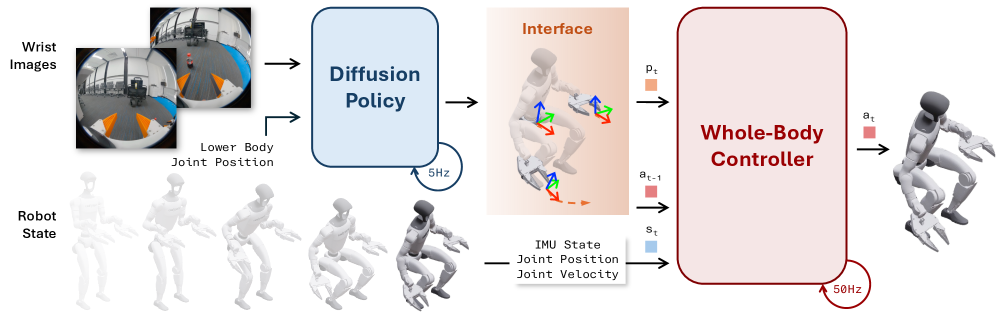
HuMI использует диффузионную политику для прямого отображения наблюдаемых состояний в траектории действий робота. В основе лежит принцип последовательного прогнозирования действий, где модель учится генерировать оптимальные последовательности команд для манипуляций. Для повышения эффективности и точности, диффузионная политика дополняется двумя ключевыми механизмами: разделением действий на логические фрагменты и отслеживанием ключевых точек объекта манипуляции. Разделение действий на фрагменты позволяет модели оперировать более крупными и осмысленными блоками действий, упрощая процесс обучения и повышая стабильность. Отслеживание ключевых точек обеспечивает точную координацию движений робота и позволяет адаптироваться к изменяющимся условиям окружающей среды.
В отличие от традиционных методов обучения роботов, HuMI не требует предварительно заданных функций вознаграждения или использования симулированных сред. Это позволяет роботу обучаться непосредственно в реальном мире, используя собственные взаимодействия с объектами и окружением. Отсутствие необходимости в ручной разработке функций вознаграждения существенно упрощает процесс обучения и повышает его адаптивность к различным задачам и условиям, поскольку робот самостоятельно определяет успешные действия на основе анализа собственных сенсорных данных и кинематических параметров.
Координация движений в системе HuMI
Центральным элементом HuMI является контроллер всего тела, предназначенный для координации работы всех суставов робота с целью достижения требуемых движений. Этот контроллер осуществляет управление на основе кинематического анализа и отслеживания положения рабочего инструмента, обеспечивая точность и стабильность перемещений. Координация осуществляется путем вычисления необходимых углов поворота каждого сустава для достижения заданной позы и траектории рабочего инструмента, учитывая ограничения по скорости и ускорению суставов, а также избегая столкновений с окружающей средой. В процессе работы контроллер непрерывно адаптируется к изменяющимся условиям и внешним воздействиям, поддерживая устойчивость и надежность движений робота.
В основе координации движений в HuMI лежит использование обратной кинематики и отслеживания концевого эффектора. Обратная кинематика позволяет вычислять углы, необходимые для каждого сустава робота, чтобы достичь заданной позиции и ориентации концевого эффектора. Отслеживание концевого эффектора обеспечивает стабильность движения, постоянно корректируя углы суставов в ответ на внешние возмущения или неточности в модели робота. Комбинация этих методов позволяет HuMI выполнять точные и устойчивые движения, необходимые для сложных задач манипулирования и перемещения.
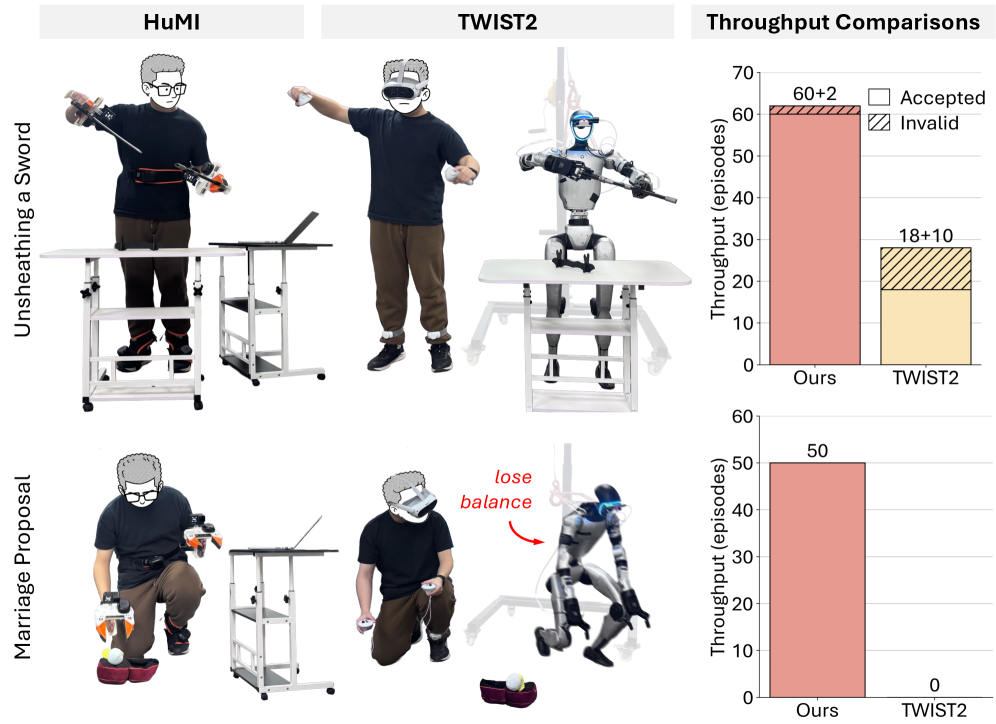
Адаптивные награды для конечных эффекторов и аугментация переменной скорости значительно повышают устойчивость и эффективность обучения HuMI. Адаптивные награды динамически корректируются в зависимости от производительности робота, оптимизируя процесс обучения для достижения более надежных результатов. Аугментация переменной скорости позволяет HuMI адаптировать скорость движения в реальном времени, что особенно важно для навигации в сложных и непредсказуемых средах. Данная комбинация позволила системе HuMI достичь более высокой скорости сбора данных — 62 эпизода за 15 минут, по сравнению с 28 эпизодами при телеуправлении, и продемонстрировать 70% успешность в ранее не встречавшихся условиях.
В ходе реализации HuMI на платформе Unitree G1 были продемонстрированы успешные возможности локомоции и манипулирования. В незнакомых условиях система достигла 70% успеха выполнения задач. Оценка качества выполнения, выраженная в коэффициенте принятия пользователем, составила 96.7%, что значительно превосходит показатель в 64.3%, полученный при использовании дистанционного управления. Данные результаты демонстрируют превосходство HuMI в автоматизированном выполнении задач по сравнению с традиционными методами управления.
В ходе испытаний на платформе Unitree G1, система HuMI позволила собрать 62 эпизода данных за 15 минут, что значительно превосходит результат телеоператорского управления, которое за тот же период времени позволило собрать лишь 28 эпизодов. Данный показатель демонстрирует повышенную эффективность HuMI в сборе данных для обучения и адаптации робота, позволяя сократить время, необходимое для достижения стабильной работы в различных условиях. Увеличение количества собранных эпизодов напрямую влияет на скорость обучения и улучшение общих характеристик робототехнической системы.

К адаптивным и универсальным роботам
Роботизированная система HuMI демонстрирует значительный прогресс в области надежной локомо-манипуляции, позволяя роботам одновременно ориентироваться в пространстве и взаимодействовать с окружающей средой. Эта способность к одновременному перемещению и выполнению задач является ключевым шагом к созданию действительно автономных роботов, способных эффективно функционировать в сложных и непредсказуемых условиях. В отличие от традиционных подходов, требующих предварительного программирования каждого движения и реакции, HuMI позволяет роботу адаптироваться к изменяющимся обстоятельствам в реальном времени, что значительно повышает его устойчивость и эффективность. Такая интеграция навигации и манипуляций открывает широкие перспективы для применения роботов в различных сферах, от логистики и здравоохранения до ликвидации последствий стихийных бедствий, где требуется способность действовать в динамичной обстановке.
В отличие от традиционных подходов к управлению роботами, требующих детального программирования каждого действия, система HuMI демонстрирует способность к обучению непосредственно из опыта. Это позволяет роботу адаптироваться к сложным и непредсказуемым условиям окружающей среды, преодолевая ограничения, присущие жестко заданным алгоритмам. Благодаря такому подходу, HuMI способна самостоятельно совершенствовать свои навыки выполнения задач, например, координацию движений при одновременной навигации и манипулировании объектами. Это открывает перспективы для создания действительно гибких и универсальных роботизированных систем, способных к автономной работе в различных реальных сценариях, и существенно расширяет возможности применения человекоподобных роботов в таких областях, как логистика, здравоохранение и ликвидация последствий стихийных бедствий.
Разработка адаптивных робототехнических систем открывает широкие перспективы для их внедрения в различные сферы деятельности. В частности, ожидается, что усовершенствованные гуманоидные роботы найдут применение в логистике, оптимизируя процессы складирования и транспортировки грузов, а также в здравоохранении, где они смогут ассистировать медицинскому персоналу и ухаживать за пациентами. Не менее важным представляется потенциал роботов в ликвидации последствий стихийных бедствий и чрезвычайных ситуаций, где они смогут проводить поисково-спасательные операции в опасных условиях, недоступных для человека. Подобные разработки значительно расширят возможности автоматизации и повысят эффективность работы в критически важных областях, способствуя повышению безопасности и качества жизни.
В ходе выполнения задачи, включающей приседание и подъем предмета, система HuMI продемонстрировала впечатляющий уровень успешности, достигнув 85% (17 из 20 попыток). Этот результат свидетельствует о значительном прогрессе в области обучения роботов сложным двигательным навыкам непосредственно на основе собственного опыта. Способность надежно выполнять подобные действия, сочетающие в себе координацию движений и взаимодействие с окружающей средой, является ключевым шагом к созданию более адаптивных и универсальных роботизированных систем, способных эффективно функционировать в реальных условиях.

Исследование, представленное в данной работе, стремится к упрощению процесса обучения человекоподобных роботов сложным манипуляциям. Авторы предлагают HuMI — систему, позволяющую собирать данные и обучать роботов без непосредственного взаимодействия с ними, что значительно снижает сложность и стоимость разработки. Этот подход особенно важен, учитывая проблемы, связанные с воплощением, достижимостью и ошибками при выполнении задач. Как однажды заметил Брайан Керниган: «Простота — высшая степень совершенства». Эта фраза отражает суть работы — стремление к элегантным и эффективным решениям, где каждый компонент выполняет свою функцию без излишней сложности, что позволяет создать более надежные и управляемые системы.
Что дальше?
Представленная работа, освободившая манипуляции гуманоидными роботами от необходимости непосредственного участия последних в процессе сбора данных, лишь подчеркнула фундаментальную сложность задачи. Иллюзия прогресса часто кроется в перекладывании трудностей — от физической реализации к проблеме репрезентации, от кинемтической осуществимости к адекватности модели. Существующая система, требующая уточнений относительно «осуществимости», уже проиграла.
Будущие исследования неизбежно столкнутся с необходимостью преодоления разрыва между симуляцией и реальностью, не прибегая к бесконечной калибровке. Понятие «обобщения» в контексте сложной многосуставной кинематики требует переосмысления. Необходимо стремиться к минимализму — к алгоритмам, способным к адаптации, а не к накоплению бесконечных баз данных. Простота — это не признак слабости, а признак зрелости.
Истинный прогресс заключается не в увеличении сложности систем, а в их очищении. Задача не в том, чтобы научить робота имитировать движения, а в том, чтобы он понял принципы, лежащие в их основе. Понятность — это вежливость, и система, неспособная к самообъяснению, обречена на забвение.
Оригинал статьи: https://arxiv.org/pdf/2602.06643.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Huawei nova 15 Max ОБЗОР
- Что купить фотографу. Рекомендации
- ВИ.РУ акции прогноз. Цена VSEH
- Honor 600 ОБЗОР: отличная камера, объёмный накопитель, плавный интерфейс
- Что означают буквы на объективе. Маркировка объективов Nikon.
- Как фотографировать огонь.
- Обзор фотокамеры Nikon D7000
- Nikon D7200
- Ремонтная мастерская обнаружила раннюю ревизию GeForce RTX 4090 Founders Edition с неисправным чипом, отсутствующим на более новых платах.
2026-02-09 07:54