Автор: Денис Аветисян
Новый подход к визуальному сервоуправлению позволяет роботам надежно захватывать и перемещать объекты без выраженной текстуры, используя информацию с RGB-D камер и алгоритмы фильтрации Калмана.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"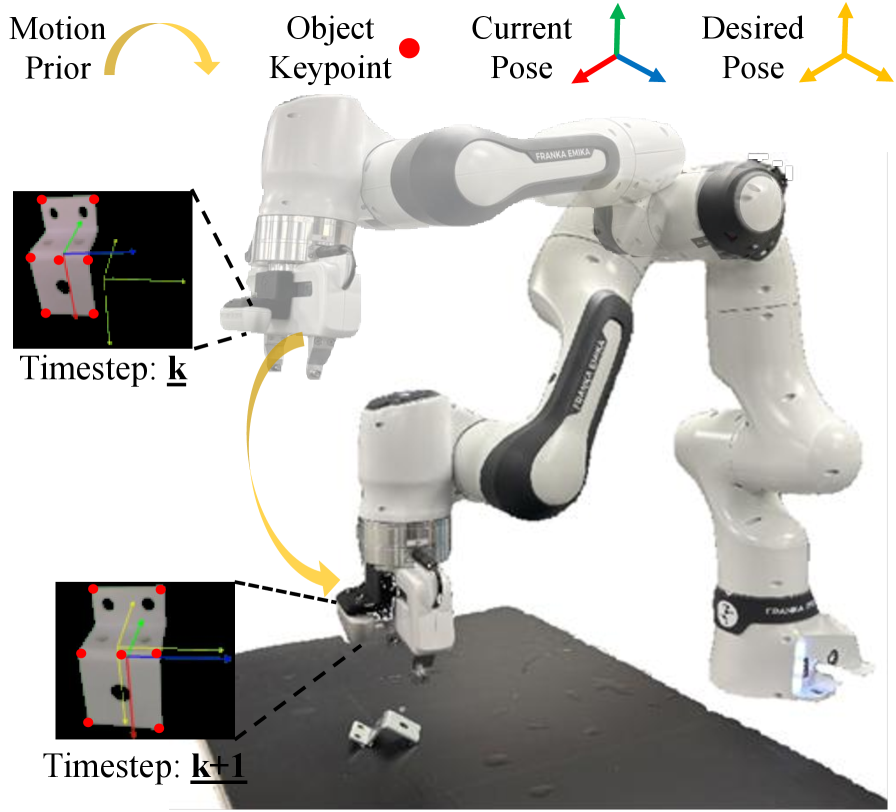
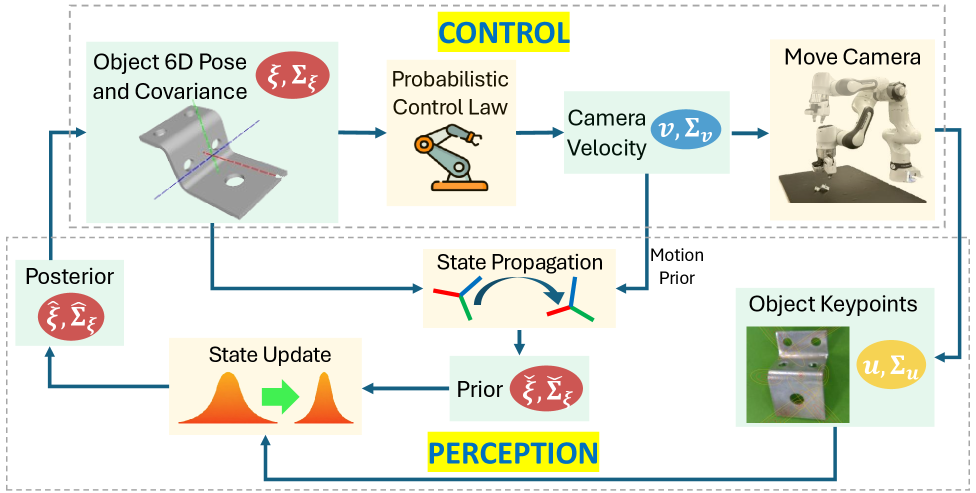
Представлена схема сервоуправления, объединяющая оценку позы объекта на основе ключевых точек с фильтром Калмана расширенного типа для управления манипулятором.
Несмотря на широкое применение визуального сервоуправления в робототехнике, манипулирование объектами без ярко выраженной текстуры остается сложной задачей из-за отсутствия надежных визуальных признаков. В данной работе, посвященной теме ‘Perception-Control Coupled Visual Servoing for Textureless Objects Using Keypoint-Based EKF’, предложен новый подход, основанный на интеграции восприятия и управления в замкнутом контуре с использованием расширенного фильтра Калмана (EKF) для оценки 6D-позы объекта по ключевым точкам. Предложенный метод позволяет повысить точность и устойчивость сервоуправления, особенно в условиях неблагоприятных визуальных помех. Будет ли данный подход способствовать созданию более надежных и гибких робототехнических систем, способных эффективно работать с широким спектром объектов в реальных условиях?
Преодоление Слепоты Роботов: Задачи Визуального Сервоуправления Без Опорных Точек
Традиционные методы визуального сервоуправления в значительной степени зависят от возможности обнаружения и отслеживания характерных признаков на объекте. Однако, при работе с объектами, лишенными выраженной текстуры или визуальных особенностей — например, идеально гладкими металлическими деталями или однородными сферами — эта зависимость становится серьезным препятствием. Отсутствие достаточного количества надежных признаков приводит к неустойчивости алгоритмов оценки положения и ориентации объекта в пространстве, что, в свою очередь, существенно ограничивает возможности робота по точному и надежному манипулированию такими предметами в реальных условиях. Это особенно актуально для промышленных приложений, где часто приходится работать с объектами, специально разработанными для минимального отражения света и отсутствия каких-либо выступающих элементов.
Отсутствие чётких и устойчивых признаков на объекте существенно осложняет задачу оценки его положения в пространстве, приводя к нестабильности и сбоям в работе систем визуального управления. Это особенно критично в реальных условиях, где роботам часто приходится манипулировать предметами с гладкой или однородной поверхностью, такими как полированные металлические детали или упакованные товары. Неточность определения положения объекта не только снижает эффективность манипуляций, но и может привести к столкновениям, повреждению оборудования или даже представлять угрозу безопасности. В результате, возможности роботов в задачах, требующих точного захвата и перемещения объектов без выраженной текстуры, оказываются значительно ограничены, что подчеркивает необходимость разработки новых алгоритмов и подходов к визуальному сервированию.
Точность и надёжность определения позы объекта играет ключевую роль в успешном визуальном сервоуправлении, особенно когда речь идёт о предметах, лишённых выраженных признаков. В подобных ситуациях традиционные алгоритмы, полагающиеся на обнаружение и отслеживание углов, краёв или текстурных особенностей, оказываются неэффективными. Поэтому, для преодоления дефицита признаков, разрабатываются инновационные подходы, включающие использование глубокого обучения для извлечения скрытых характеристик, методы, основанные на анализе силуэта, и стратегии, комбинирующие информацию из различных сенсоров. Эти усовершенствования позволяют роботам надёжно захватывать и манипулировать объектами, даже если их поверхность гладкая и однородная, что значительно расширяет возможности автоматизации в промышленности и повседневной жизни.
Перцептивно-Контролируемый Фреймворк: Надежная Оценка Позы в Шести Степенях Свободы
Предлагаемый фреймворк использует расширенный фильтр Калмана для объединения визуальных данных с априорными данными о движении, что обеспечивает более стабильную оценку 6D позы объекта. Визуальные данные, полученные от сенсоров, комбинируются с предсказанной позой, основанной на модели движения, для уменьшения влияния шума и неопределенностей. Фильтр Калмана итеративно обновляет оценку позы, используя текущие измерения и предсказание, что позволяет отслеживать положение и ориентацию объекта в пространстве даже при частичной потере визуальной информации или наличии помех. Использование расширенного фильтра Калмана позволяет обрабатывать нелинейные модели движения и обеспечивает более точную и надежную оценку 6D позы по сравнению с традиционными методами фильтрации.
Обнаружение ключевых точек в предлагаемой системе осуществляется с помощью сети PVNet, после чего полученные данные уточняются с использованием сверточных нейронных сетей (CNN) и сетей-трансформеров. PVNet обеспечивает первоначальное выделение ключевых точек, а последующая обработка с помощью CNN и трансформеров позволяет извлечь более устойчивые и надежные признаки, необходимые для точной оценки позы объекта. Использование комбинации этих архитектур позволяет повысить робастность системы к шумам, окклюзиям и изменениям освещения, обеспечивая стабильное и точное обнаружение ключевых точек даже в сложных условиях.
В рамках предложенной системы оценки положения и ориентации используется алгебра Ли для эффективного обновления и дифференцирования вращательных преобразований. Вместо непосредственной работы с матрицами вращения, представление вращений в виде элементов алгебры Ли позволяет использовать аддитивные операции и линейные приближения, что существенно снижает вычислительную сложность. Использование алгебры Ли позволяет компактно представлять вращения (например, с помощью se(3) матрицы) и выполнять операции, такие как композиция вращений и вычисление якобианов, с меньшими затратами ресурсов. Такой подход особенно важен при итеративных алгоритмах оптимизации, где требуется многократное вычисление производных и обновление оценок.
Моделирование Неопределенности и Вероятностное Управление: Основа Надежного Сервопривода
В рамках разработанной системы, явное моделирование неопределенности в процессе оценки позы позволяет повысить устойчивость к шумам, возникающим при работе датчиков, и непредсказуемым внешним воздействиям. Вместо использования детерминированных оценок, система оперирует вероятностным распределением позы, отражающим степень уверенности в ее точности. Это достигается за счет учета ковариационных матриц, описывающих статистические свойства ошибок сенсоров, и их распространения в процессе фильтрации. Такой подход позволяет алгоритму более эффективно отсеивать ложные измерения и адаптироваться к меняющимся условиям, обеспечивая более надежную и точную оценку позы объекта в условиях помех и неопределенности.
В системе реализован вероятностный закон управления, который использует данные о скорости камеры для вычисления стабильных и надежных команд скорости для робота-манипулятора. Данный закон учитывает неопределенность, возникающую в процессе оценки позы объекта, и позволяет компенсировать влияние шумов сенсоров и внешних возмущений. В его основе лежит расчет оптимального управления на основе вероятностной модели, что обеспечивает более устойчивое и точное выполнение заданных траекторий движения манипулятора, особенно в условиях неполной или зашумленной информации. Влияние скорости камеры учитывается в процессе расчета производных, необходимых для оценки и коррекции траектории движения.
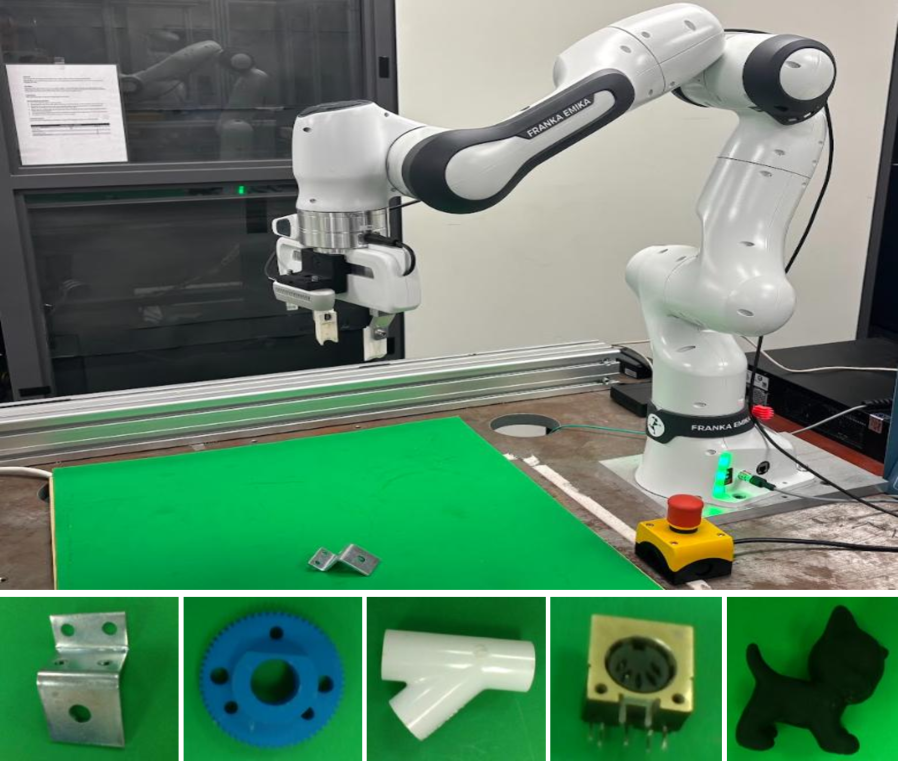
Для экспериментальной проверки и демонстрации эффективности разработанного подхода использовались камера Intel RealSense D435 и манипулятор Franka Emika. Камера RealSense D435 обеспечивала данные о глубине и изображении, необходимые для оценки положения объекта и окружающей среды. Манипулятор Franka Emika, в свою очередь, использовался для выполнения задач, требующих точного позиционирования и управления, что позволило оценить эффективность предложенного алгоритма управления в реальных условиях. Комбинация этих аппаратных средств позволила получить надежные и воспроизводимые результаты, подтверждающие работоспособность и преимущества предложенного подхода к моделированию неопределенностей и вероятностному управлению.
В ходе экспериментов была продемонстрирована высокая надежность системы управления, выраженная через показатель Servo Success Rate (SR). В нормальных условиях SR составил 95.12%, что свидетельствует о стабильной работе системы в предсказуемой среде. Даже в неблагоприятных условиях, характеризующихся повышенным уровнем помех и неопределенностей, SR оставался на уровне 82.61%. Данный показатель значительно превосходит результаты, полученные с использованием базовых методов управления, что подтверждает эффективность предложенного подхода к моделированию неопределенностей и реализации вероятностного закона управления.
Подтверждение Эффективности и Перспективы Развития: От Теории к Практике
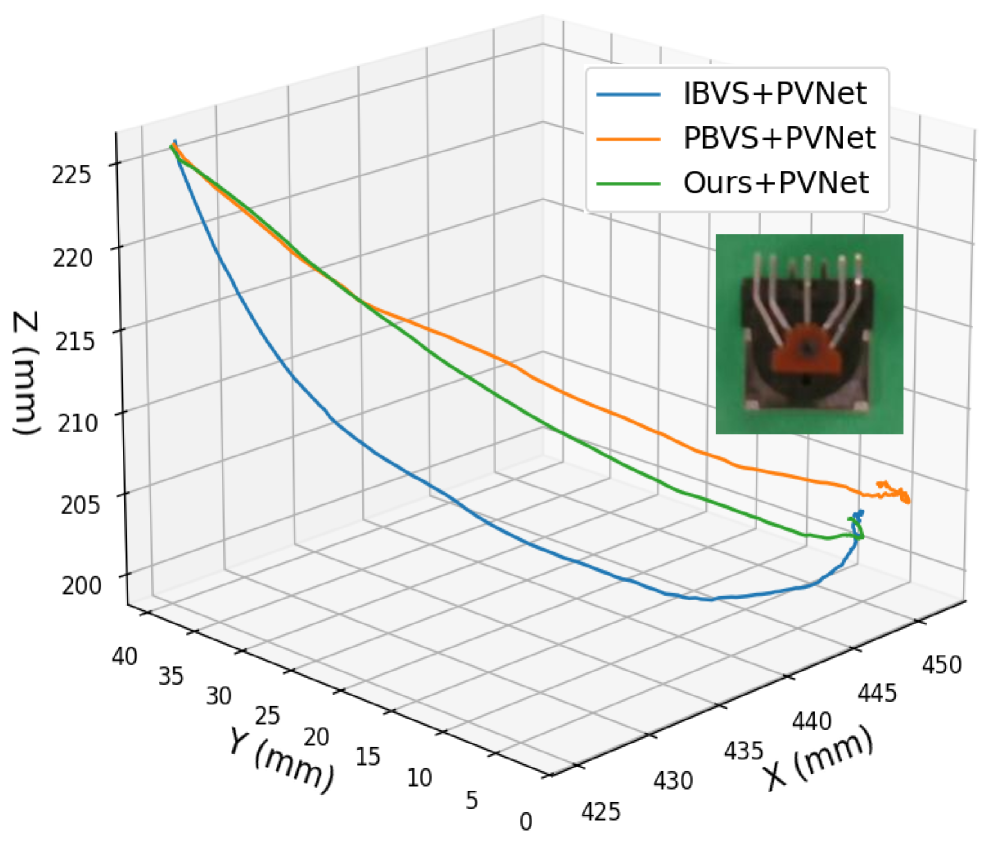
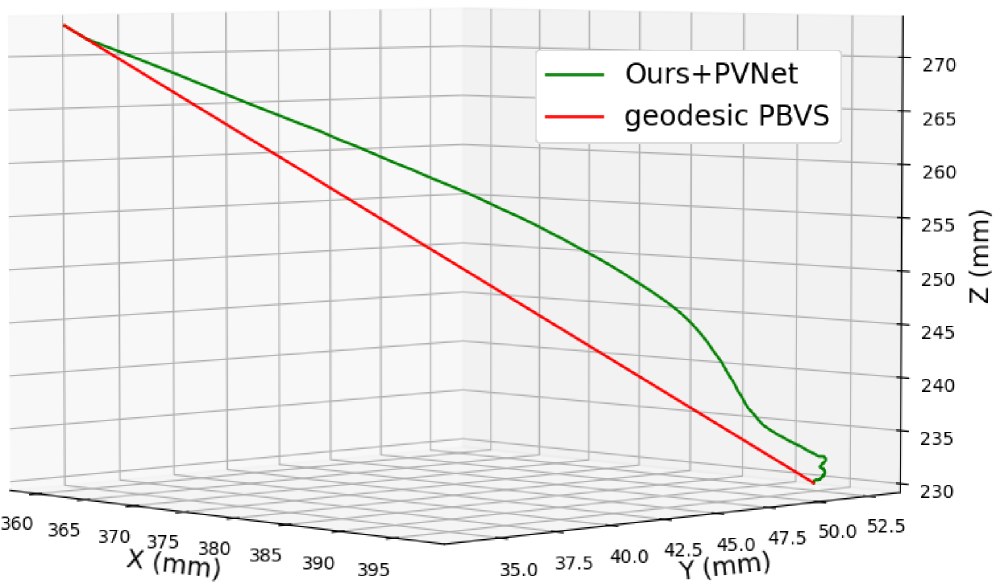
Экспериментальные результаты продемонстрировали, что предложенная платформа обеспечивает более высокий процент успешного серво-управления и снижает отношение длины траектории, что свидетельствует о заметном улучшении производительности и эффективности. Повышение процента успешного серво-управления указывает на более надежное и точное выполнение заданных манипуляций, в то время как уменьшение отношения длины траектории означает, что робот способен выполнять те же задачи, используя более короткие и оптимальные пути. Данные показатели позволяют сделать вывод о том, что разработанный подход обеспечивает более плавные, быстрые и энергоэффективные движения, открывая возможности для применения в широком спектре роботизированных систем.
В ходе экспериментов предложенная система продемонстрировала значительное повышение точности позиционирования. В частности, зафиксировано уменьшение конечной погрешности трансляции до 0,92 мм и погрешности вращения — до 0,45 градусов по сравнению с базовыми методами. Это свидетельствует о способности системы выполнять манипуляции с более высокой точностью и стабильностью, что критически важно для задач, требующих высокой степени аккуратности, например, при сборке сложных механизмов или выполнении деликатных операций. Полученные результаты подчеркивают потенциал системы для применения в широком спектре роботизированных приложений, где минимизация ошибок является приоритетной задачей.
В ходе экспериментов удалось добиться снижения коэффициента длины траектории (Trajectory Length Ratio) до 0.5, что свидетельствует о значительном повышении эффективности планирования движений. Данный показатель напрямую отражает оптимальность маршрута, выбранного роботом для выполнения задачи. Уменьшение коэффициента указывает на то, что система способна находить более короткие и прямые пути к цели, избегая излишних движений и, как следствие, снижая время выполнения и энергопотребление. Сокращение длины траектории не только повышает общую производительность манипулятора, но и способствует более плавному и точному выполнению операций, что особенно важно при работе с хрупкими или деликатными объектами.
В ходе экспериментов зафиксирован впечатляющий показатель успешных захватов — 89.9%, что является наивысшим средним значением, достигнутым для всех протестированных объектов. Этот результат свидетельствует о высокой надежности и эффективности разработанной системы манипулирования. Достигнутая точность позволяет роботу уверенно взаимодействовать с различными предметами, демонстрируя значительное улучшение по сравнению с существующими подходами. Такой уровень успешности открывает перспективы для применения системы в сложных сценариях, где требуется аккуратное и надежное обращение с объектами, например, в автоматизированных производственных процессах или в роботизированной хирургии.
Для обеспечения оперативного управления и обмена данными между сервером и роботизированной рукой использовалась библиотека обмена сообщениями ZeroMQ. Данная технология позволила создать высокопроизводительный канал связи, минимизируя задержки и обеспечивая надежную передачу команд и телеметрической информации. В результате, система демонстрирует отзывчивость в реальном времени, что критически важно для точного манипулирования объектами и адаптации к изменяющимся условиям окружающей среды. Бесшовная интеграция ZeroMQ позволила реализовать эффективный протокол связи, способствуя повышению общей производительности и стабильности роботизированной системы.
Представленная работа закладывает основу для создания более надежных и универсальных роботизированных систем манипулирования. Достигнутые улучшения в точности позиционирования и эффективности траектории движения позволяют предвидеть возможность применения разработанного подхода в сложных и динамичных условиях, где требуется адаптация к различным объектам и окружению. Повышенная надежность захвата и оптимизация планирования движения открывают перспективы для автоматизации широкого спектра задач, начиная от сборки сложных механизмов и заканчивая работой в неструктурированных средах, таких как склады или домашние хозяйства. Данные результаты стимулируют дальнейшие исследования в области адаптивного управления роботами и разработки интеллектуальных систем, способных к самостоятельному обучению и принятию решений.
Исследование демонстрирует, что даже самые передовые системы управления, использующие фильтр Калмана для оценки положения объекта, подвержены влиянию времени и неизбежно теряют свою эффективность. Этот процесс сопоставим с естественным старением любой системы, где первоначальные улучшения со временем нивелируются. Как заметил Бертран Рассел: «Страх — это величайший источник мудрости». В контексте визуального сервоуправления это означает, что понимание ограничений системы и потенциальных источников ошибок — ключевой фактор для поддержания ее надежности и адаптации к меняющимся условиям. Работа подчеркивает необходимость постоянной оценки и корректировки алгоритмов, чтобы компенсировать неизбежный откат во времени, вызванный шумами и неопределенностями.
Что Дальше?
Представленная работа, несомненно, демонстрирует способность системы адаптироваться к условиям, где визуальная информация скудна, а объекты лишены выраженных текстур. Однако, стабильность — это иллюзия, кэшированная временем. Любой аптайм — лишь временное состояние. В конечном счете, расширенный фильтр Кальмана — это инструмент, а не панацея. Неизбежно возникают вопросы о масштабируемости предложенного подхода к сценариям с высокой степенью неопределенности и динамическими изменениями в окружающей среде.
Задержка — это налог, который платит каждый запрос. Дальнейшие исследования должны быть направлены на снижение вычислительной нагрузки и оптимизацию алгоритмов оценки состояния в реальном времени. Особенно актуально изучение методов, позволяющих прогнозировать траектории движения объектов и учитывать априорные знания о физических свойствах манипулируемых тел. Возможно, интеграция с системами машинного обучения с подкреплением позволит создать более адаптивные и робастные системы управления.
Все системы стареют — вопрос лишь в том, делают ли они это достойно. В перспективе, необходимо рассматривать не только точность и скорость управления, но и энергоэффективность, отказоустойчивость и способность к самодиагностике. По сути, речь идет о создании систем, способных к эволюции и самосовершенствованию, а не просто к поддержанию стабильного состояния в заданных условиях.
Оригинал статьи: https://arxiv.org/pdf/2602.06834.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Huawei nova 15 Max ОБЗОР
- Что купить фотографу. Рекомендации
- ВИ.РУ акции прогноз. Цена VSEH
- Honor 600 ОБЗОР: отличная камера, объёмный накопитель, плавный интерфейс
- Как фотографировать огонь.
- Обзор фотокамеры Nikon D7000
- Nikon D7200
- Ремонтная мастерская обнаружила раннюю ревизию GeForce RTX 4090 Founders Edition с неисправным чипом, отсутствующим на более новых платах.
- Realme 15T ОБЗОР: плавный интерфейс, лёгкий, скоростная зарядка
2026-02-10 07:30