Автор: Денис Аветисян
В статье представлена концепция ‘Гуманоидных Факторов’, определяющая принципы проектирования искусственных роботов, ориентированных на безопасное, предсказуемое и этичное сосуществование с человеком.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"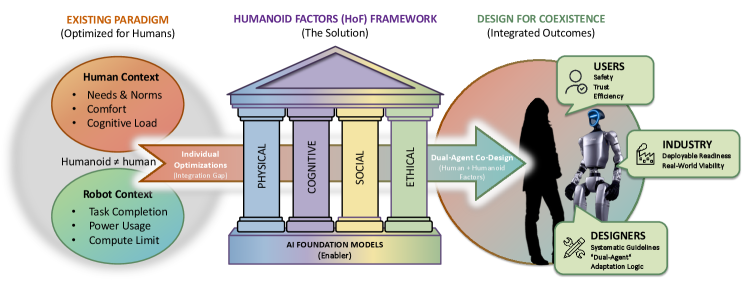
Новая концепция проектирования гуманоидных роботов, учитывающая физические, когнитивные, социальные и этические аспекты взаимодействия с человеком.
Традиционные подходы к проектированию робототехнических систем часто фокусируются исключительно на эффективности выполнения задач, упуская из виду аспекты безопасного и комфортного сосуществования с человеком. В статье ‘Humanoid Factors: Design Principles for AI Humanoids in Human Worlds’ предлагается концепция “антропоморфных факторов”, структурированная вокруг физических, когнитивных, социальных и этических аспектов, определяющих взаимодействие человека и гуманоидного робота. Предложенный подход позволяет выйти за рамки оценки исключительно функциональных возможностей, учитывая ожидания, связанные с человекоподобным поведением, и обеспечивая предсказуемость и доверие к роботам. Сможем ли мы создать действительно эффективных и безопасных компаньонов, способных гармонично вписаться в нашу повседневную жизнь?
За пределами традиционной эргономики: Эпоха человекоподобных систем
Традиционная эргономика, сосредоточенная на взаимодействии человека с инструментами, оказывается недостаточной при совместной работе с человекоподобными роботами. В отличие от пассивного использования устройств, сотрудничество с гуманоидами предполагает равноправное участие обеих сторон в выполнении задач, что требует учета когнитивных, физических и социальных аспектов взаимодействия. Стандартные методы анализа, ориентированные на оптимизацию использования инструментов, не позволяют адекватно оценить сложность совместной деятельности, где робот выступает не просто помощником, а полноценным партнером, способным к адаптации, обучению и проявлению инициативы. Это приводит к необходимости разработки новых подходов, учитывающих динамику взаимодействия, распределение ответственности и формирование доверия между человеком и роботом в процессе совместной работы.
По мере того, как количество человекоподобных роботов растёт и они всё активнее внедряются в производственные процессы, сферу обслуживания и даже домашнюю среду, возникает необходимость в переосмыслении принципов взаимодействия человека и машины. Традиционные подходы, фокусирующиеся на эргономике инструментов и интерфейсов, оказываются недостаточными для эффективной организации совместной работы с роботами, способными к автономным действиям и адаптации. Возникают уникальные сложности, связанные с распределением задач, координацией движений в ограниченном пространстве и, что особенно важно, с необходимостью учитывать когнитивные и социальные аспекты взаимодействия. Разработка новой концепции, учитывающей специфику совместных рабочих мест и совместных задач, становится критически важной для обеспечения безопасности, эффективности и комфорта в условиях растущего присутствия человекоподобных систем.
В отличие от традиционной эргономики, которая рассматривает взаимодействие человека с инструментами, новая область — Антропоморфная Эргономика — признает гуманоидного робота активным участником совместной деятельности. Это означает, что при проектировании рабочих пространств и задач необходимо учитывать не только физические возможности человека, но и когнитивные способности, социальное взаимодействие и даже потенциальные эмоциональные реакции робота. Такой подход предполагает комплексный анализ, учитывающий способность робота к обучению, адаптации к изменяющимся условиям, а также его роль в формировании доверия и эффективной коммуникации с людьми. Игнорирование этих аспектов может привести к снижению производительности, ошибкам и даже возникновению чувства дискомфорта или недоверия к роботу со стороны человека.

Четыре столпа взаимодействия: Разложение человекоподобного робота
Основа взаимодействия с человекоподобными роботами (гуманоидами) строится на четырех ключевых столпах: когнитивном, физическом, социальном и этическом. Каждый из этих столпов представляет собой критически важную область, определяющую поведение и взаимодействие робота с окружающей средой и людьми. Когнитивный столп охватывает процессы восприятия, понимания и принятия решений. Физический столп касается воплощения робота и его взаимодействия с физическим миром, включая передвижение и манипуляции с объектами. Социальный столп определяет способы взаимодействия робота с людьми, включая распознавание эмоций и социальные сигналы. Наконец, этический столп обеспечивает ответственный подход к проектированию и использованию гуманоидов, учитывая вопросы безопасности, справедливости и благополучия общества.
Когнитивный столп в архитектуре человекоподобных роботов охватывает процессы восприятия, понимания и принятия решений, определяющие способ интерпретации роботом окружающей среды. Это включает в себя сбор данных с помощью сенсоров (зрение, слух, тактильные датчики и т.д.), обработку этой информации для создания внутренней модели мира, и, на основе этой модели, формирование планов действий и выбор оптимальных решений. Эффективность когнитивного столпа напрямую зависит от сложности используемых алгоритмов машинного обучения, объемов данных для обучения, и способности робота к адаптации к изменяющимся условиям и новым задачам. Реализация когнитивных функций требует интеграции различных модулей, включая распознавание образов, обработку естественного языка, планирование траекторий и логический вывод.
Физический столп архитектуры гуманоидов охватывает аспекты воплощения и взаимодействия с физическим миром. Он определяет возможности передвижения, включая кинематику, динамику и управление равновесием, а также способность к манипулированию объектами посредством разработки эффективных схем захвата и управления. Пространственное восприятие и навигация, обеспечиваемые сенсорными системами и алгоритмами локализации и построения карт, являются ключевыми компонентами этого столпа. Разработка прочных и легких материалов, а также оптимизация конструкции для снижения энергопотребления при движении, также относятся к физическому аспекту взаимодействия гуманоида с окружающей средой.
Этические аспекты являются первостепенными при разработке и внедрении человекоподобных роботов. Обеспечение безопасности пользователей и окружающих является ключевым приоритетом, требующим тщательного анализа потенциальных рисков и разработки соответствующих мер предосторожности. Кроме того, необходимо учитывать вопросы справедливости и недискриминации, избегая предвзятости в алгоритмах и обеспечивая равный доступ к технологиям. Наконец, важно учитывать потенциальное влияние на общество, прогнозируя и смягчая возможные негативные последствия, такие как потеря рабочих мест или усиление социального неравенства. Ответственная разработка предполагает всестороннюю оценку этих факторов на протяжении всего жизненного цикла робота.
Основы поведения: От фундаментальных моделей к действиям
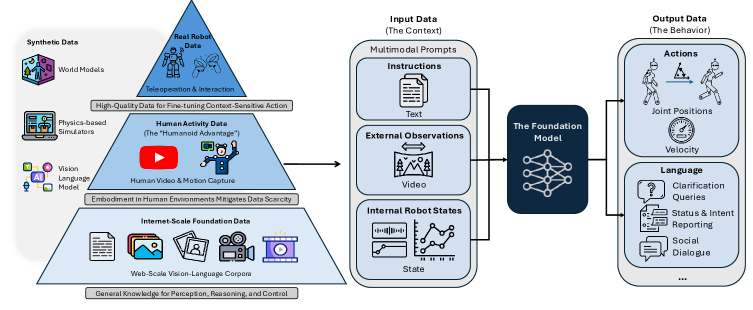
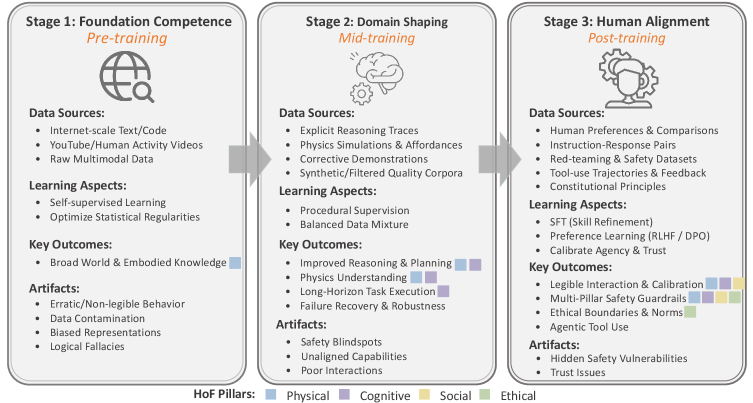
Современные гуманоидные роботы используют большие языковые и мультимодальные модели, известные как базовые модели искусственного интеллекта (AI), в качестве основы для принятия решений и адаптации к изменяющимся условиям. Эти модели, обученные на огромных объемах данных, позволяют роботам понимать сложные инструкции, планировать последовательности действий и реагировать на неожиданные ситуации без явного программирования каждого сценария. Базовые модели обеспечивают возможность обобщения знаний, позволяя роботам применять изученные навыки в новых, ранее не встречавшихся контекстах, и демонстрировать гибкость в выполнении задач, что значительно превосходит возможности традиционных систем, основанных на жестко заданных правилах.
Курирование данных имеет решающее значение для обучения моделей искусственного интеллекта, используемых в современных гуманоидных роботах. Качество и релевантность данных напрямую влияют на производительность и надежность робота в выполнении поставленных задач. Процесс курирования включает в себя сбор, очистку, аннотацию и проверку данных, а также обеспечение их соответствия конкретным требованиям, таким как формат, точность и полнота. Некачественные или нерелевантные данные могут привести к непредсказуемому поведению робота, ошибкам в принятии решений и снижению эффективности работы. Особое внимание уделяется разнообразию данных, чтобы обеспечить способность робота адаптироваться к различным условиям и сценариям.
Клонирование поведения (Behavior Cloning) представляет собой метод обучения роботов-гуманоидов, основанный на имитации действий человека. Вместо программирования каждой отдельной задачи, система обучается, анализируя записи демонстраций, выполненных человеком-оператором. Этот подход значительно ускоряет процесс разработки, позволяя роботу быстро осваивать новые навыки, такие как манипулирование объектами или навигация в сложных средах. Использование человеческих демонстраций также способствует созданию более естественного и интуитивно понятного поведения робота, поскольку он воспроизводит движения и стратегии, характерные для человека.
Использование сред моделирования позволяет проводить безопасное и эффективное тестирование выученных моделей поведения перед их развертыванием в реальном мире. Такие среды позволяют создавать контролируемые сценарии и условия, в которых можно оценить производительность робота, выявить потенциальные ошибки и нежелательное поведение без риска повреждения оборудования или нанесения вреда окружающей среде. Симуляции позволяют проводить массовое тестирование различных вариантов поведения и алгоритмов, значительно сокращая время и затраты на разработку и отладку. Кроме того, в симуляциях можно генерировать данные, необходимые для дальнейшего обучения и совершенствования моделей, что позволяет оптимизировать их производительность и надежность перед реальным развертыванием.
Оценка естественности и эффективности: Антропоцентричный подход
Платформа Unitree G1 предоставляет уникальную возможность для количественной оценки человекоподобных характеристик роботов. Используя ее, исследователи могут проводить точные измерения различных параметров движения и взаимодействия, что позволяет объективно оценить, насколько робот приближается к естественным движениям человека. Это достигается путем проведения контролируемых экспериментов и сбора данных, которые затем анализируются с использованием метрик, отражающих эффективность и плавность движений. Такой подход позволяет не только оценить текущий уровень развития робототехники, но и выявить области, требующие дальнейшей оптимизации для создания более интуитивно понятных и эффективных роботов-гуманоидов.
Закон Фиттса, фундаментальный принцип из области когнитивной психологии, изначально разработанный для оценки эффективности взаимодействия человека с компьютерным интерфейсом, оказался применимым и к оценке естественности движений гуманоидных роботов. Данный закон утверждает, что время, необходимое для достижения цели, зависит от расстояния до неё и размера этой цели — чем дальше и меньше цель, тем больше времени требуется для её достижения. Применительно к робототехнике, это позволяет количественно оценивать, насколько плавно и эффективно робот выполняет задачи, требующие точных движений, например, захват предметов или нажатие на кнопки. Исследование показало, что соответствие движения робота закону Фиттса является ключевым показателем его способности взаимодействовать с окружающей средой и выполнять задачи, приближенные к человеческим.
Экспериментальные исследования, проведенные на платформе Unitree G1, продемонстрировали, что простое клонирование поведения недостаточно для достижения человекоподобной моторики. В частности, при оценке точности и скорости движений с использованием закона Фиттса — принципа, определяющего эффективность взаимодействия человека с объектами — роботизированная система показала коэффициент детерминации R^2 = 0.596. Этот показатель существенно ниже, чем у человека, чья средняя точность, измеренная в тех же условиях, составила R^2 = 0.741. Полученные данные указывают на необходимость разработки более сложных алгоритмов, учитывающих не только имитацию действий, но и принципы естественной, эффективной моторики, свойственной человеку, для создания действительно человекоподобных роботов.
Успешное выполнение поставленных задач, подкрепленное эффективным взаимодействием человека и робота, наглядно демонстрирует практическую применимость разработанной концепции «Humanoid Factors». Исследования показали, что при грамотном учете принципов человеческого восприятия и эргономики, робототехнические системы способны не просто выполнять команды, но и взаимодействовать с людьми интуитивно и естественно. Это открывает перспективы для широкого спектра применений, от помощи по дому и в промышленности до совместной работы в сложных и опасных условиях. Подтверждение работоспособности концепции на платформе Unitree G1 свидетельствует о возможности создания роботов, которые не только функциональны, но и удобны, безопасны и приятны в использовании, что является ключевым фактором для их успешной интеграции в повседневную жизнь.

Рассмотрение взаимодействия человека и робота, представленное в данной работе, акцентирует внимание на необходимости создания предсказуемых и безопасных систем. Это перекликается с мыслями Клода Шеннона: «Информация — это мера преодоления неопределенности». В контексте Humanoid Factors, снижение неопределенности в поведении робота — залог успешного сосуществования. Принципы, лежащие в основе Humanoid Factors, стремятся к структурной честности взаимодействия, где приоритет отдается ясности и предсказуемости, а не сложным, избыточным функциям. Подобный подход позволяет минимизировать риски и способствует гармоничному включению роботов в человеческую среду.
Куда же дальше?
Предложенная здесь концепция «Гуманоидных Факторов» — не столько решение, сколько переформулировка задачи. Стремление к созданию роботов, имитирующих человека, долгое время было ориентировано на эффективность выполнения задач. Однако, как показывает анализ, истинная сложность заключается не в том, что робот может делать, а в том, как он сосуществует с нами. Упрощение — это не отказ от сложности, а её переосмысление, выявление фундаментальных принципов, которые обеспечивают безопасность и предсказуемость взаимодействия.
Очевидным ограничением является текущий акцент на кинестетическом подражании. Имитация движений — лишь поверхностный уровень. Настоящая интеграция потребует глубокого понимания когнитивных и социальных механизмов, лежащих в основе человеческого взаимодействия. Необходимо разработать метрики, оценивающие не только функциональность, но и «этическую совместимость» робота с человеческим обществом. Иначе, мы рискуем создать лишь сложные инструменты, лишенные здравого смысла.
Будущие исследования должны сместить фокус с «искусственного интеллекта» как такового, на создание систем, способных к самоограничению и осознанию границ своей компетенции. Истинная «интеллектуальность» проявляется не в способности к безграничному познанию, а в умении признать свою некомпетентность. Иначе, вся эта сложная архитектура окажется лишь избыточностью, маскирующейся под прогресс.
Оригинал статьи: https://arxiv.org/pdf/2602.10069.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Realme 12 Pro+ ОБЗОР: большой аккумулятор, плавный интерфейс, современный дизайн
- vivo iQOO Z11x ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- Фотографируем муравьёв с Андреем Павловым
- Как правильно закрепить ремень на фотокамере
- Преодолевая границы масштабируемости рекомендательных систем
- Cooler Master запускает комплект вертикального крепления видеокарты PCIe 5.0 за около 70 долларов в Китае.
- ZTE Blade V80 Max ОБЗОР: удобный сенсор отпечатков, большой аккумулятор, плавный интерфейс
- Oppo K14 ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- Warhammer 40,000: Space Marine 2 — Список всех врагов и боссов на данный момент
2026-02-11 15:34