Автор: Денис Аветисян
Исследователи представляют TaCo — комплексный набор данных и алгоритмы сжатия, открывающие новые возможности для обработки и передачи информации от тактильных сенсоров.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"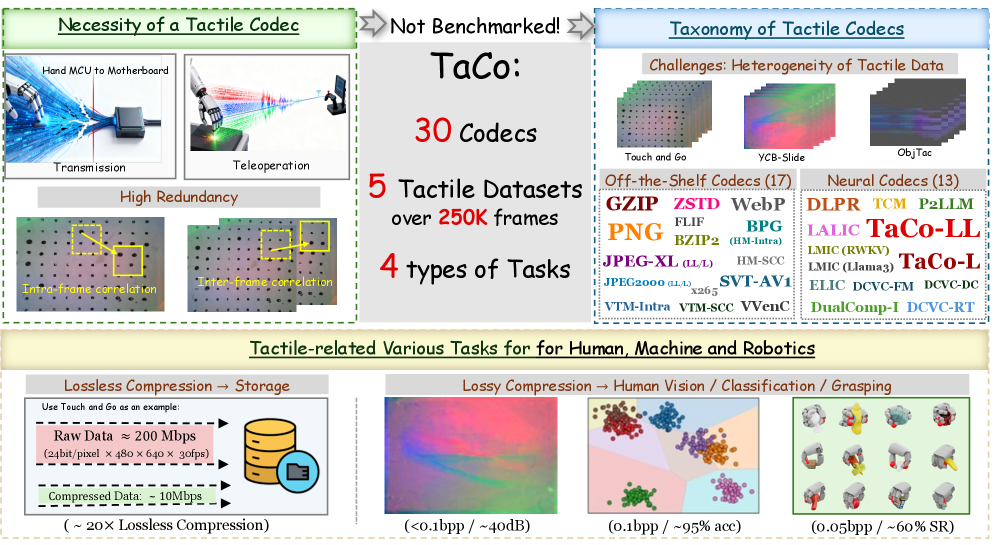
Представлен эталонный набор данных TaCo и data-driven кодеки TaCo-LL и TaCo-L, демонстрирующие передовые результаты в задачах сжатия гетерогенных тактильных данных.
Эффективная компрессия тактильных данных, необходимых для работы роботов в реальном времени, остаётся сложной задачей из-за их гетерогенности и сложности. В данной работе представлена платформа ‘TaCo: A Benchmark for Lossless and Lossy Codecs of Heterogeneous Tactile Data’, предназначенная для всесторонней оценки методов компрессии тактильных данных. Авторы предлагают новый набор данных и оценивают 30 алгоритмов, включая нейронные кодеки, а также разрабатывают собственные решения — TaCo-LL (без потерь) и TaCo-L (с потерями), демонстрирующие превосходные результаты. Сможет ли эта платформа ускорить развитие тактильного восприятия и открыть новые возможности для роботизированных систем?
Тактильные данные: узкое место в робототехнике и виртуальной реальности
Тактильное восприятие играет ключевую роль в развитии как робототехники, так и виртуальной реальности, позволяя устройствам взаимодействовать с окружающим миром и предоставлять пользователям более реалистичный опыт. Однако, получение детальной тактильной информации генерирует огромные объемы данных, что создает серьезную проблему для их обработки и передачи в реальном времени. Объем поступающей информации настолько велик, что требует разработки эффективных методов сжатия, способных уменьшить размер данных без существенной потери качества тактильных ощущений. Без эффективного сжатия, передача и обработка тактильных данных становятся узким местом в системах, ограничивая их возможности и отзывчивость, что особенно критично для приложений, требующих мгновенной реакции и высокой точности.
Традиционные методы сжатия данных, разработанные для изображений или звука, оказываются неэффективными при работе со сложными тактильными данными. Проблема заключается в том, что высокая точность передачи информации о прикосновении — необходимое условие для реалистичной обратной связи в робототехнике и виртуальной реальности — требует высокой скорости передачи данных. Однако, увеличение скорости передачи данных приводит к значительному росту объема передаваемой информации, что создает узкое место в системах реального времени. Попытки снизить скорость передачи данных, используя стандартные алгоритмы сжатия, приводят к потере важных деталей тактильного восприятия, снижая реалистичность и точность взаимодействия. В результате, существующие методы сжатия сталкиваются с трудностями в достижении оптимального баланса между качеством передаваемой тактильной информации и скоростью ее передачи, что ограничивает возможности применения тактильных датчиков в системах, требующих мгновенной реакции.
Существующие методы обработки тактильных данных часто оказываются неспособными эффективно адаптироваться к разнообразию взаимодействий и типов сенсоров. Традиционные алгоритмы компрессии, разработанные для визуальной или звуковой информации, не учитывают специфику тактильных сигналов — их высокую размерность, временную зависимость и нелинейность. Это приводит к тому, что универсальные подходы демонстрируют низкую эффективность при работе с различными материалами, скоростями скольжения или конфигурациями сенсорных массивов. Неспособность к динамической адаптации требует ручной настройки параметров для каждого конкретного сценария, что ограничивает масштабируемость и затрудняет интеграцию тактильных датчиков в реальные робототехнические системы и виртуальную реальность. Разработка алгоритмов, способных обучаться на данных и автоматически оптимизировать параметры компрессии в зависимости от текущего взаимодействия, является ключевой задачей для преодоления этого ограничения.
Обучение нейронных сетей: новый подход к сжатию тактильных данных
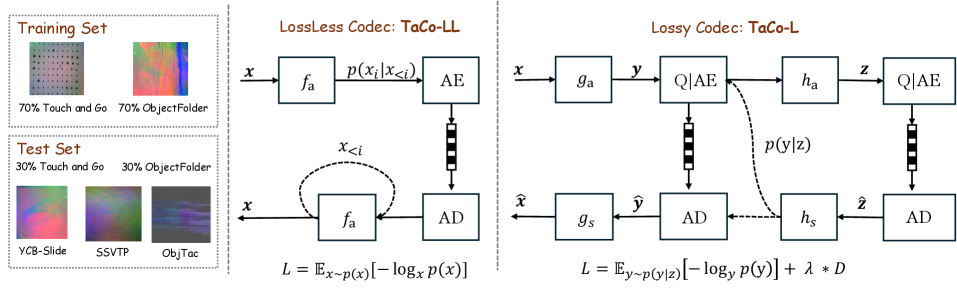
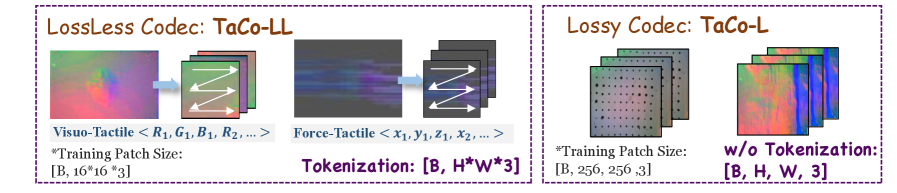
Представлен фреймворк сжатия тактильных данных, основанный на обучении нейронных сетей для формирования эффективных представлений. В отличие от традиционных методов, использующих вручную разработанные признаки, данный подход позволяет автоматически адаптироваться к внутренней структуре и избыточности тактильных сигналов. Нейронные сети обучаются непосредственно на данных, что позволяет выявлять и использовать сложные зависимости, неявные для ручного анализа. Это приводит к более компактному представлению данных при сохранении или минимальной потере информации, в зависимости от конкретной конфигурации сети и применяемого алгоритма сжатия.
Традиционные методы обработки тактильных данных часто полагались на предварительно заданные, разработанные вручную признаки для извлечения и сжатия информации. Предложенный подход отказывается от этой практики, используя нейронные сети для автоматического выявления и использования внутренней структуры и избыточности, присущей тактильным сигналам. Это позволяет алгоритму адаптироваться к конкретным характеристикам данных, оптимизируя эффективность сжатия и уменьшая потерю информации по сравнению с методами, основанными на фиксированных признаках. В результате, система способна более эффективно представлять тактильные данные, акцентируя внимание на наиболее значимых элементах сигнала и игнорируя несущественные.
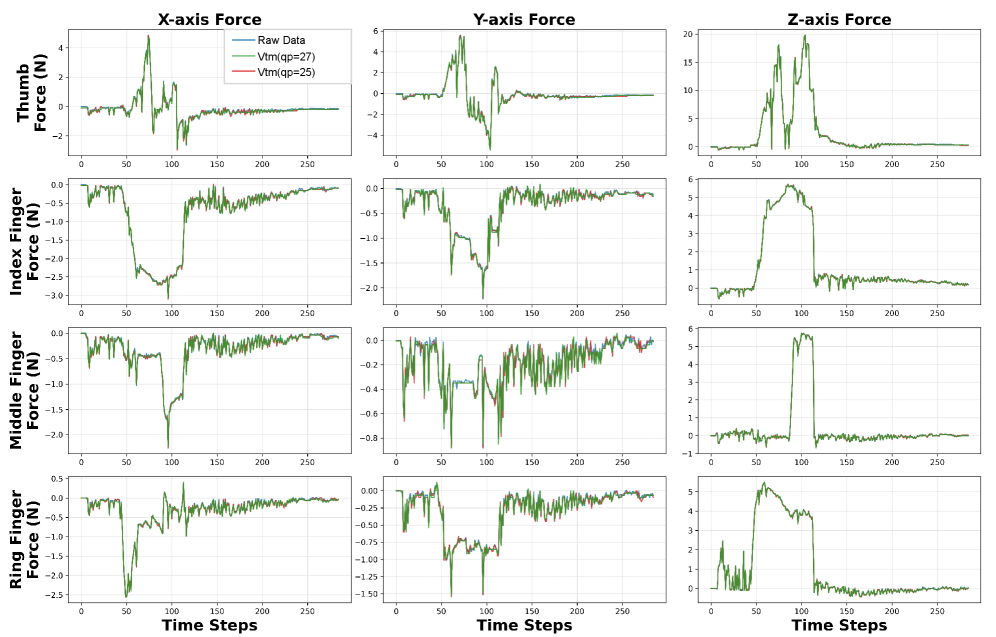
Разработаны два кодека для сжатия тактильных данных: TaCo-L и TaCo-LL. TaCo-L представляет собой кодек с потерями, оптимизированный для приложений, где приоритетом является высокая степень сжатия, а допустимы незначительные потери информации. TaCo-LL — это кодек без потерь, обеспечивающий полное восстановление исходных данных, что критически важно для приложений, требующих абсолютной точности, таких как медицинская диагностика или роботизированная хирургия. Выбор между TaCo-L и TaCo-LL зависит от конкретных требований к компромиссу между степенью сжатия и сохранением информации.
TaCo Benchmark: всесторонняя оценка эффективности сжатия
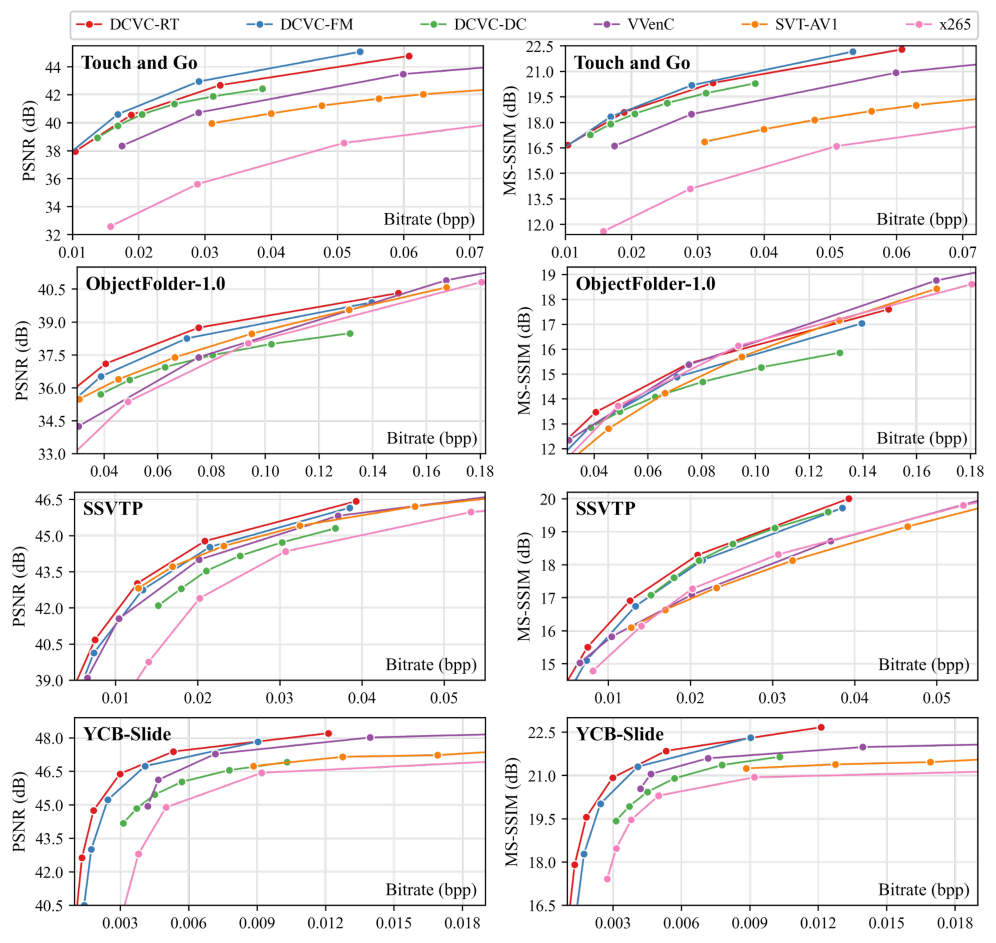
Для всесторонней оценки эффективности разработанных методов сжатия тактильных данных был создан комплексный бенчмарк TaCo Benchmark. Он включает в себя пять широко используемых наборов данных: Touch and Go, специализирующийся на динамических тактильных ощущениях; ObjectFolder, содержащий данные о статических формах объектов; SSVTP (Single Surface View Tactile Primitives), представляющий собой базовый набор тактильных примитивов; YCB-Slide, включающий данные о скольжении объектов; и ObjTac, содержащий данные о тактильных характеристиках различных объектов. Использование разнородных наборов данных позволяет провести объективную оценку производительности алгоритмов сжатия в различных сценариях и условиях.
Методы TaCo-L и TaCo-LL демонстрируют стабильное превосходство над существующими алгоритмами сжатия тактильных данных на различных наборах данных, включая Touch and Go, ObjectFolder, SSVTP, YCB-Slide и ObjTac. В частности, на наборе данных Touch and Go достигнуты коэффициенты сжатия до 18x по сравнению с существующими решениями. Это указывает на значительное повышение эффективности хранения и передачи тактильных данных при использовании предложенных методов.
Для количественной оценки производительности алгоритмов сжатия тактильных данных использовались метрики PSNR (Peak Signal-to-Noise Ratio), RMSE (Root Mean Squared Error) и битрейт. Результаты тестирования на наборе данных Touch and Go показали снижение BD-Rate (Bitrate Difference Rate) на 61.8% по сравнению с базовыми методами сжатия. BD-Rate является ключевым показателем эффективности сжатия видео и тактильных данных, отражающим разницу в битрейте при одинаковом воспринимаемом качестве. Более низкое значение BD-Rate указывает на более эффективное сжатие при сохранении качества тактильных ощущений.
Влияние и перспективы: к приложениям с тактильной обратной связью в реальном времени
Кодеки TaCo обеспечивают передачу и обработку тактильных данных в режиме реального времени, что является критически важным для широкого спектра приложений. В частности, это открывает новые возможности для телеопераций, где оператор может дистанционно управлять роботом, ощущая текстуру и сопротивление объектов. В виртуальной и дополненной реальности (VR/AR) тактильная обратная связь, обеспечиваемая этими кодеками, значительно повышает степень погружения и реалистичность взаимодействия с виртуальным миром. Кроме того, в области роботизированных манипуляций, возможность точного и своевременного получения тактильной информации позволяет роботам более эффективно и безопасно взаимодействовать с окружающей средой, выполняя сложные задачи, требующие деликатности и точности.
Разработка кодеков TaCo открывает новые возможности для широкого внедрения тактильных сенсоров, особенно на устройствах с ограниченными ресурсами. Снижение требований к пропускной способности данных позволяет использовать тактильные технологии не только в мощных компьютерных системах, но и в мобильных роботах, протезах, а также в системах виртуальной и дополненной реальности, работающих на смартфонах и других портативных устройствах. Это значительно расширяет сферу применения тактильных сенсоров, делая их более доступными и практичными для широкого круга пользователей и приложений, от телеуправления сложными механизмами до создания более реалистичных и интуитивно понятных интерфейсов взаимодействия с цифровым миром.
Исследования показали, что применение кодека TaCo-LL обеспечивает впечатляющие результаты в задачах, требующих тактильной обратной связи. В ходе экспериментов, процент успешного подъема объектов составил 62.2%, а устойчивость к внешним возмущениям — 59.9%. Примечательно, что такая высокая эффективность достигается даже при сжатии данных более чем в 200 раз, при этом сохраняется высокая точность классификации тактильных сигналов. Это демонстрирует значительный потенциал TaCo-LL для создания компактных и эффективных систем тактильного восприятия, применимых в широком спектре устройств и приложений, от телеробототехники до виртуальной и дополненной реальности.
Наблюдатель отмечает, что стремление к новым кодекам сжатия тактильных данных, как представлено в TaCo, неизбежно приводит к увеличению технического долга. Авторы предлагают TaCo-LL и TaCo-L, демонстрируя state-of-the-art результаты, но история учит, что любая “революционная” технология рано или поздно превратится в проблему поддержки. Это особенно верно для data-driven подходов, где сложность модели скрывает хрупкость алгоритма. Как заметил Эдсгер Дейкстра: «Программирование — это не столько о создании новых вещей, сколько об организации существующих». Иными словами, элегантная теория сжатия неизбежно встретится с суровой реальностью продакшена, где стабильная, но последовательная ошибка ценится выше, чем амбициозный, но ненадежный прорыв.
Что дальше?
Представленный бенчмарк TaCo, как и любой другой, неизбежно станет узким местом. Рано или поздно, появятся данные, которые он не сможет адекватно оценить, или задачи, для которых предложенные кодеки окажутся непригодными. Это не недостаток — это закон природы. Данные всегда сложнее моделей. Вопрос лишь в том, когда первая система начнет генерировать артефакты, которые робот воспримет как реальное тактильное взаимодействие, и кто первым получит возможность обвинить алгоритм в повреждении дорогостоящего оборудования.
Очевидно, что дальнейшее увеличение степени сжатия — лишь гонка вооружений. Гораздо интереснее — исследование пределов восприятия. Какую минимальную информацию о тактильном контакте необходимо сохранить, чтобы робот мог выполнять полезные действия? Где грань между достаточным и избыточным представлением тактильных данных? И, что самое главное, кто-нибудь подумал о безопасности? Ведь сжатие — это всегда потеря информации, а потеря информации в тактильном восприятии может привести к неожиданным и неприятным последствиям.
В конечном счете, TaCo — это лишь ещё один кирпичик в фундаменте, который рано или поздно обрушится под тяжестью новых данных и задач. Но это не повод для пессимизма. Это повод для подготовки к неизбежному. Ведь каждая «революционная» технология завтра станет техдолгом, и прод всегда найдёт способ сломать элегантную теорию.
Оригинал статьи: https://arxiv.org/pdf/2602.09893.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Фотографируем муравьёв с Андреем Павловым
- Realme 12 Pro+ ОБЗОР: большой аккумулятор, плавный интерфейс, современный дизайн
- Oppo K14 ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- Warhammer 40,000: Space Marine 2 — Список всех врагов и боссов на данный момент
- Преодолевая границы масштабируемости рекомендательных систем
- vivo iQOO Z11x ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- Nikon D7200
- Cooler Master запускает комплект вертикального крепления видеокарты PCIe 5.0 за около 70 долларов в Китае.
- vivo S50 Pro mini ОБЗОР: чёткое изображение, беспроводная зарядка, скоростная зарядка
2026-02-12 04:53