Автор: Денис Аветисян
Исследователи разработали систему, позволяющую оператору управлять роботом-гуманоидом с минимальной задержкой и высокой точностью.
Представлен фреймворк ExtremControl, обеспечивающий управление всем телом робота с задержкой менее 50 мс за счет кинематического преобразования, проактивного управления скоростью и точной калибровки импеданса.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"Существующие системы дистанционного управления человекоподобными роботами часто страдают от значительной задержки, ограничивающей их отзывчивость и возможности выполнения задач, требующих быстрой реакции. В данной работе, представленной под названием ‘ExtremControl: Low-Latency Humanoid Teleoperation with Direct Extremity Control’, предложен новый фреймворк управления, позволяющий снизить задержку до 50 мс за счет непосредственного управления звеньями робота в пространстве Картёша и использования опережающего управления по скорости. Разработанный подход ExtremControl, основанный на строгой калибровке импеданса, обеспечивает возможность выполнения сложных задач, таких как жонглирование и балансировка мяча, демонстрируя существенное превосходство над ранее достигнутыми результатами. Каковы перспективы применения ExtremControl для создания более интуитивных и эффективных систем взаимодействия человека и робота в различных сферах, включая реабилитацию и промышленную автоматизацию?
Вневременное взаимодействие: вызовы воплощенного интеллекта
Для создания действительно интерактивных роботов недостаточно просто обеспечить их передвижение; ключевым является бесшовное взаимодействие с человеком. Это подразумевает не только способность робота понимать команды и выполнять действия, но и умение адаптироваться к невербальным сигналам, таким как жесты и мимика, а также предвидеть намерения человека. Разработка такого взаимодействия требует глубокого понимания когнитивных процессов человека и способности робота к эмпатии и социальному обучению. Успешная реализация этой задачи открывает возможности для создания роботов-компаньонов, ассистентов и помощников, способных органично вписываться в повседневную жизнь человека и эффективно сотрудничать с ним в различных сферах деятельности.
Традиционные методы управления роботами зачастую испытывают затруднения при работе в реальных условиях, характеризующихся высокой сложностью и непредсказуемостью. Они, как правило, разрабатываются для строго определенных сценариев и демонстрируют снижение эффективности при столкновении с непредвиденными обстоятельствами или нечеткими командами со стороны человека. Например, робот, запрограммированный на выполнение определенной последовательности действий в контролируемой среде, может оказаться неспособным адаптироваться к неожиданному препятствию или изменить траекторию движения в ответ на просьбу человека. Эта проблема усугубляется неточностью сенсорных данных и задержками в обработке информации, что приводит к неоптимальным или даже ошибочным действиям. В результате, для создания действительно интерактивных и надежных роботов необходимы более гибкие и адаптивные системы управления, способные учитывать динамику окружающей среды и намерения человека.
Для достижения эффективного управления роботами, необходимо отказаться от традиционного подхода, фокусирующегося на отдельных суставах, и перейти к координации всего тела робота — так называемому Whole-Body Control. Этот метод предполагает одновременное управление всеми степенями свободы робота, что позволяет ему адаптироваться к сложным и непредсказуемым условиям окружающей среды. Вместо изолированного управления каждой частью, система Whole-Body Control рассматривает робота как единое целое, учитывая взаимодействие между всеми его компонентами. Такой подход позволяет создавать более плавные, устойчивые и естественные движения, необходимые для успешного взаимодействия с людьми и выполнения сложных задач в реальном мире. Особенно важно это в ситуациях, требующих точной координации, например, при манипулировании объектами или навигации в ограниченном пространстве, где даже небольшая ошибка в координации может привести к сбою.
ExtremControl: Новый подход к управлению роботами
ЭкстремКонтроль (ExtremControl) представляет собой управляющую структуру, ориентированную на точное управление конечностями гуманоидного робота. Ключевым элементом является интеграция управления скоростью (velocity feedforward), позволяющая предвосхищать движения и, как следствие, повышать отзывчивость робота. Этот подход направлен на минимизацию задержки отслеживания (tracking delay) и обеспечение более плавных и естественных взаимодействий робота с окружающей средой, что особенно важно для задач, требующих высокой точности и скорости реакции.
В рамках ExtremControl используется метод отображения в картотезическое пространство (Cartesian-Space Mapping) для упрощения управления манипуляторами гуманоидного робота. Вместо работы с углами суставов, желаемые движения задаются в виде координат в трехмерном декартовом пространстве (x, y, z). Этот подход позволяет напрямую указывать положение и ориентацию конечного эффектора, минуя сложные кинематические расчеты и обратную кинематику. Преобразование желаемых координат в управляющие сигналы для приводов осуществляется посредством специализированных алгоритмов, что существенно снижает вычислительную нагрузку и повышает точность позиционирования. Использование координат в картотезическом пространстве также облегчает интеграцию с задачами, требующими точного взаимодействия с окружающей средой, такими как сборка или манипулирование объектами.
Механизм предварительной компенсации скорости в ExtremControl предназначен для прогнозирования будущих движений, что позволяет минимизировать эффект задержки отслеживания (Tracking Delay) и обеспечивать более плавное и естественное взаимодействие робота с окружающей средой. Валидация данной модели управления показала высокую степень соответствия между измеренными и теоретически предсказанными значениями, выраженными формулой 2*(1-η)/ωn, как в симуляции, так и при аппаратной реализации. Здесь, η представляет собой коэффициент демпфирования, а ωn — собственную частоту системы.
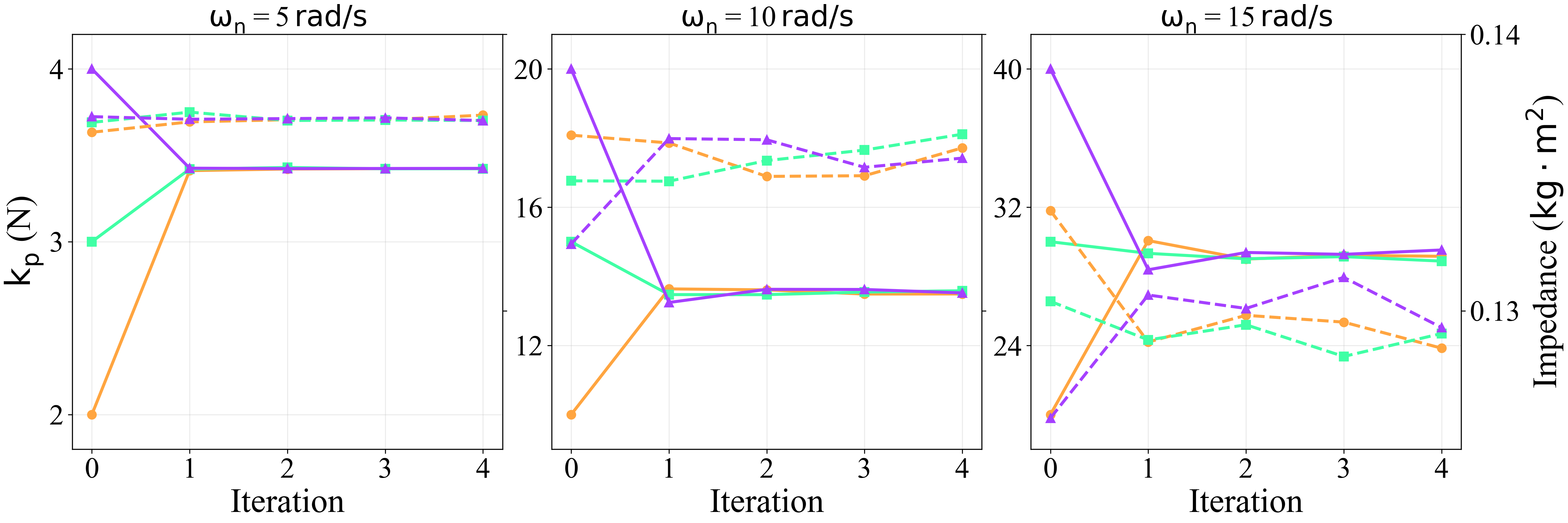
В основе ExtremControl лежит управление на основе импеданса (Impedance Control), которое обеспечивает контроль над силой и положением робота. Для достижения оптимальной производительности данная система управления расширяется за счет калибровки импеданса всего тела (Whole-Body Impedance Calibration). Этот процесс заключается в определении и настройке параметров импеданса для каждой степени свободы робота, учитывая его динамические характеристики и взаимодействие с окружающей средой. Калибровка позволяет минимизировать ошибки отслеживания траектории и повысить устойчивость системы, особенно при выполнении сложных задач, требующих точного контроля над силами и моментами, прикладываемыми роботом к объектам.
Подтверждение и обучение посредством симуляции
Симулятор Genesis предоставляет высокореалистичную физическую среду для тестирования и доработки фреймворка ExtremControl. Он моделирует динамику робота и взаимодействие с окружающей средой с высокой точностью, позволяя проводить обширные испытания алгоритмов управления в контролируемых условиях. Это включает в себя моделирование сил, моментов, трения и других физических явлений, что критически важно для оценки производительности и надежности ExtremControl перед развертыванием на реальном роботе. Использование физически реалистичной симуляции позволяет выявлять и устранять потенциальные проблемы, связанные с физическими ограничениями и непредсказуемым поведением реального мира, значительно сокращая время и затраты на разработку.
Для обучения политик управления роботом используется обучение с подкреплением, в качестве основы для которого служат наборы данных, такие как LAFAN1 Dataset. Этот датасет содержит информацию о движениях человека, что позволяет алгоритмам обучения с подкреплением генерировать реалистичные и эффективные стратегии управления. Использование LAFAN1 Dataset обеспечивает разнообразие обучающих данных, охватывающих широкий спектр движений и ситуаций, что способствует повышению обобщающей способности и надежности разработанных политик управления для робота Unitree G1.
Дистилляция политик позволяет перенести сложные стратегии управления, полученные в процессе обучения с подкреплением, в более простые и эффективные алгоритмы. Этот процесс предполагает обучение «студенческой» политики, имитирующей поведение более сложной «учительской» политики, полученной из данных, например, LAFAN1 Dataset. В результате получается более компактная и вычислительно менее затратная политика, пригодная для развертывания на реальном роботе, таком как Unitree G1, без значительной потери в производительности, что подтверждается данными об ошибке глобального позиционирования (Epos), представленными в Таблице II.
Робот Unitree G1 используется в качестве основной платформы в симуляции для реалистичного тестирования и валидации разработанных алгоритмов. Значения глобальной ошибки позиционирования (Epos), представленные в Таблице II, демонстрируют влияние различных компонентов обучения на точность отслеживания. Анализ данных Epos позволяет оценить эффективность каждого компонента и определить оптимальную конфигурацию системы управления для достижения требуемой производительности. В частности, сравнение значений Epos для различных комбинаций компонентов обучения позволяет выявить критические факторы, влияющие на точность позиционирования робота Unitree G1 в симулированной среде.
Расширение возможностей взаимодействия: телеуправление и виртуальная реальность
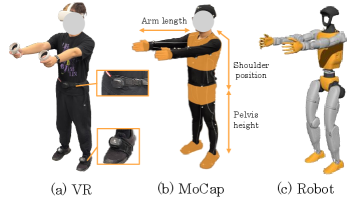
Дистанционное управление, или телеоперация, становится интуитивно понятным благодаря интеграции оптической системы захвата движений и виртуальной реальности. Данный подход позволяет оператору напрямую переносить собственные движения на робота, создавая ощущение физического присутствия и контроля. Оптическая система захвата отслеживает малейшие изменения в движениях оператора, а виртуальная реальность обеспечивает визуальную обратную связь, отображая действия робота в реальном времени. В результате, управление роботом становится максимально естественным и не требует сложных навыков или длительного обучения, открывая широкие возможности для применения в различных сферах, от хирургии до исследования опасных сред.
Система пропорционально-интегрально-дифференциального (ПИД) управления играет ключевую роль в обеспечении стабильных и точных движений при телеуправлении роботами. Этот метод, основанный на непрерывной коррекции отклонений от заданной траектории, позволяет роботу плавно реагировать на команды оператора и эффективно компенсировать внешние возмущения. Пропорциональная составляющая мгновенно реагирует на текущую ошибку, интегральная — устраняет систематические отклонения, а дифференциальная — предвосхищает изменения, обеспечивая демпфирование и предотвращая колебания. Благодаря такой многоуровневой системе обратной связи, даже сложные манипуляции становятся управляемыми и предсказуемыми, существенно повышая эффективность и безопасность телеоператорского взаимодействия.
Разработанная система телеуправления, объединяющая оптическую систему захвата движения и виртуальную реальность, демонстрирует впечатляющее снижение задержки — до 50 миллисекунд. Этот показатель существенно превосходит существующие аналоги, где задержка часто достигает 200 миллисекунд. Такое значительное уменьшение времени отклика критически важно для обеспечения интуитивного и точного управления роботом на расстоянии, позволяя оператору ощущать более непосредственную связь с удаленным устройством и реагировать на изменения в реальном времени. Благодаря этому, система открывает новые возможности для применения роботов в сложных и требующих высокой точности задачах, где даже небольшая задержка может привести к ошибкам или неэффективности.
Интегрированный подход к управлению роботами, сочетающий телеоперацию, оптическую систему захвата движений и виртуальную реальность, открывает новые возможности для взаимодействия человека и машины в реальных условиях. Разработанная система позволяет создать роботов, способных не просто выполнять заданные команды, но и адаптироваться к сложным и динамичным ситуациям, возникающим в процессе работы. Подобная бесшовная интеграция позволяет человеку интуитивно управлять роботом на расстоянии, что критически важно для применения в таких областях, как хирургия, обслуживание опасных объектов, или помощь в чрезвычайных ситуациях. В перспективе, подобные технологии могут значительно расширить возможности человека, позволяя ему эффективно решать задачи, требующие точности, скорости и безопасности, даже находясь на значительном удалении от места действия.
Исследование, представленное в данной работе, демонстрирует стремление к созданию систем, способных к адаптации и эффективному взаимодействию с окружающей средой. Задержка в телеуправлении, сниженная до 50 миллисекунд благодаря ExtremControl, — это не просто технический прогресс, но и шаг к более естественному и интуитивному управлению сложными системами. Как отмечал Джон фон Нейманн: «В науке нет абсолютно ничего важнее, чем умение предвидеть последствия». Разработка ExtremControl, включающая в себя калибровку импеданса и управление на основе скорости, является ярким примером проактивного подхода к решению проблем, связанных с латентностью и устойчивостью человекоподобных роботов. Эффективное управление подобными системами требует не только точных алгоритмов, но и глубокого понимания динамики взаимодействия, что подтверждает стремление авторов к созданию надежного и предсказуемого контроля.
Куда же дальше?
Представленная работа демонстрирует снижение задержки в телеуправлении гуманоидными роботами до впечатляющих 50 миллисекунд. Однако, снижение метрики само по себе не решает фундаментальной проблемы. Система, как и любое сложное образование, стареет не из-за ошибок в коде, а из-за неизбежности времени. Уменьшение задержки лишь отодвигает момент, когда несовершенство модели мира и неточность сенсорных данных неизбежно приведут к нестабильности.
Перспективы дальнейших исследований лежат не только в совершенствовании алгоритмов управления и калибровке импеданса. Гораздо более сложная задача — разработка систем, способных адаптироваться к меняющимся условиям и непредсказуемым событиям. Стабильность, достигаемая за счет жестких ограничений и точной калибровки, может оказаться лишь иллюзией, задержкой катастрофы, которая проявится при малейшем отклонении от идеальных условий.
Будущие работы должны быть направлены на создание систем, способных к самообучению и самовосстановлению, систем, которые не просто реагируют на изменения, а предвидят их. В конечном итоге, цель не в том, чтобы создать робота, управляемого человеком без задержек, а в том, чтобы создать автономную систему, способную функционировать в реальном мире, несмотря на его непредсказуемость и хаос.
Оригинал статьи: https://arxiv.org/pdf/2602.11321.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Как правильно закрепить ремень на фотокамере
- Realme 12 Pro+ ОБЗОР: большой аккумулятор, плавный интерфейс, современный дизайн
- 20 основных команд командной строки Windows 11, которые должен знать каждый пользователь
- vivo iQOO Z11x ОБЗОР: яркий экран, плавный интерфейс, большой аккумулятор
- Honor 600 ОБЗОР: лёгкий, плавный интерфейс, скоростная зарядка
- Cooler Master запускает комплект вертикального крепления видеокарты PCIe 5.0 за около 70 долларов в Китае.
- Преодолевая границы масштабируемости рекомендательных систем
- Фотографируем муравьёв с Андреем Павловым
- ZTE nubia Focus 2 ОБЗОР: плавный интерфейс, большой аккумулятор, отличная камера
2026-02-13 16:19