Автор: Денис Аветисян
Исследователи предлагают инновационный подход к навигации в сложных средах, объединяя возможности Vision-Language Models и 3D Gaussian Splatting для улучшения пространственного мышления.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"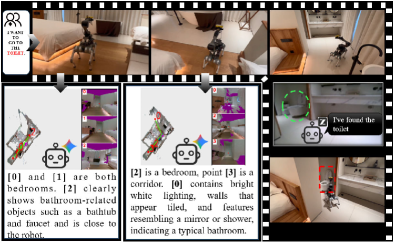
Представлен фреймворк 3DGSNav, позволяющий Vision-Language Models эффективно выполнять навигацию в неизвестных пространствах, используя активное 3D Gaussian Splatting.
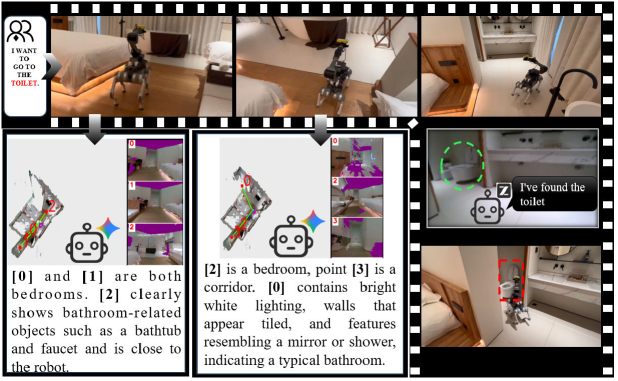
Несмотря на значительный прогресс в области воплощенного интеллекта, обеспечение надежной навигации агентов в незнакомых средах остается сложной задачей. В данной работе, представленной под названием ‘3DGSNav: Enhancing Vision-Language Model Reasoning for Object Navigation via Active 3D Gaussian Splatting’, предлагается новый подход к навигации по объектам, основанный на интеграции 3D Gaussian Splatting и моделей «зрение-язык» для улучшения пространственного рассуждения. Предложенная система, 3DGSNav, активно строит 3D-представление окружения, позволяя моделировать перспективные виды и повышая точность идентификации целевых объектов. Способна ли эта архитектура открыть путь к более гибким и адаптивным системам навигации в реальном мире?
В поисках незримого: вызовы обучения без примеров
Традиционные методы роботизированной навигации, как правило, требуют предварительно созданных карт окружения или обширных наборов обучающих данных, что существенно ограничивает адаптивность роботов к новым, неизвестным ситуациям. Полагаясь на заранее заданную информацию, такие системы испытывают трудности при столкновении с неожиданными препятствиями или изменениями в окружающей среде. Этот подход делает их неэффективными в динамичных и непредсказуемых условиях, где быстрое реагирование и способность к самообучению являются критически важными. Необходимость постоянного обновления карт или повторного обучения при изменении обстановки значительно снижает практическую ценность и универсальность подобных роботов, особенно в реальных, неструктурированных пространствах.
Суть задачи обучения с нулевым примером — это создание роботов, способных ориентироваться и взаимодействовать с окружающим миром, даже если они никогда ранее не сталкивались с конкретной обстановкой или объектами. В отличие от традиционных методов, требующих обширных баз данных и предварительного обучения для каждого нового сценария, данная область исследований стремится к созданию систем, способных к обобщению и адаптации на основе лишь словесного описания цели или свойств объекта. Это предполагает, что робот должен уметь понимать инструкции, например, «принесите синюю чашку», и успешно выполнять их в совершенно новой обстановке, не имея предварительного опыта взаимодействия с синими чашками или данной комнатой. Преодоление этой задачи требует разработки сложных алгоритмов, способных извлекать и применять знания из различных источников, включая лингвистические данные и общие представления о мире.
3DGSNav: Архитектура воплощенного интеллекта
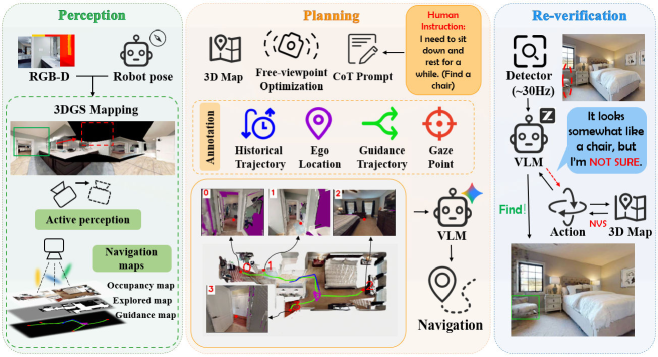
3DGSNav представляет собой новую структуру для навигации объектов в условиях нулевой обучаемости, объединяющую преимущества 3D Gaussian Splatting и Vision-Language Models (VLM). Данная структура позволяет агенту ориентироваться в ранее не виденных пространствах, используя 3D Gaussian Splatting для эффективного представления и визуализации окружающей среды. Интеграция с VLM обеспечивает понимание естественного языка и позволяет планировать траектории к целевым объектам на основе текстовых инструкций, без предварительного обучения на конкретных локациях или объектах. Таким образом, 3DGSNav обеспечивает гибкость и адаптивность в задачах навигации, преодолевая ограничения традиционных методов, требующих больших объемов размеченных данных.
В основе подхода 3DGSNav лежит использование 3D Gaussian Splatting (3DGS) в качестве представления памяти об окружающей среде. 3DGS представляет собой метод нейронного рендеринга, позволяющий создавать детальные и фотореалистичные сцены из разреженных наборов гауссовых сплэтов. В отличие от традиционных методов, требующих значительных вычислительных ресурсов для хранения и обработки трехмерной информации, 3DGS обеспечивает эффективное кодирование геометрии и внешнего вида сцены, что позволяет быстро и точно визуализировать окружение и проводить над ним рассуждения. Такая компактная и эффективная репрезентация памяти критически важна для задач навигации в реальном времени и работы с большими и сложными пространствами.
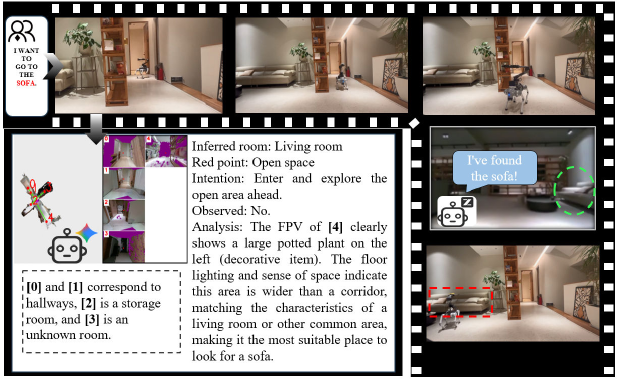
Система 3DGSNav обеспечивает навигацию по ранее не изученным пространствам, интерпретируя инструкции на естественном языке благодаря интеграции 3D Gaussian Splatting (3DGS) и Vision-Language Model (VLM). VLM обрабатывает лингвистические команды, определяя целевой объект и его местоположение. Затем эта информация используется для планирования оптимального пути в 3DGS-представлении среды. 3DGS выступает в роли эффективной памяти и системы рендеринга, позволяя быстро визуализировать и анализировать окружение, что критически важно для успешной навигации в новых, неизученных локациях. Сочетание этих технологий позволяет агенту выполнять навигационные задачи, опираясь на семантическое понимание инструкций и точное представление окружающей среды.
Активное восприятие: взгляд, формирующий реальность
Система 3DGSNav использует методы активного восприятия для целенаправленного выбора точек обзора, что позволяет роботу эффективно снижать неопределенность и получать недостающую перцептивную информацию об окружении. В отличие от пассивного восприятия, где робот воспринимает данные из фиксированной позиции, активное восприятие предполагает активное изменение точки обзора для оптимизации сбора данных. Это достигается путем анализа текущей перцептивной неопределенности и выбора следующей точки обзора, которая максимизирует получение новой, релевантной информации о сцене и, в частности, о целевом объекте. Такой подход позволяет роботу более надежно ориентироваться в сложных и частично скрытых окружениях, повышая эффективность навигации и обнаружения объектов.
Система выбора точки обзора в 3DGSNav использует принцип, основанный на оценке степени визуальной окклюзии. Выбор осуществляется в пользу областей с высокой степенью перекрытия объектов, что позволяет максимизировать прирост информации при каждом наблюдении. Данный подход предполагает, что области с наибольшей визуальной окклюзией содержат наиболее значимую информацию о скрытых частях окружения и потенциальных целях, что способствует более эффективному построению карты и планированию траектории. Приоритезация точек обзора с высокой окклюзией позволяет системе активно собирать данные, необходимые для снижения неопределенности и повышения точности восприятия.
Оптимизация на основе траектории дополнительно уточняет выбор точки обзора, обеспечивая эффективное планирование пути и навигацию к целевому объекту. Данный процесс включает в себя прогнозирование оптимальной траектории движения робота и использование этой информации для корректировки выбора точек обзора. Это позволяет системе не только выбирать точки, обеспечивающие максимальный сбор информации, но и учитывать будущие движения робота, минимизируя необходимость повторных корректировок и обеспечивая плавную и эффективную навигацию к цели. В процессе оптимизации учитываются как геометрические факторы (расстояние до объекта, наличие препятствий), так и кинематические ограничения робота, что гарантирует выполнимость запланированной траектории.
Система 3DGSNav использует алгоритм YOLOE для обнаружения объектов в реальном времени, что позволяет роботу идентифицировать потенциальные цели в окружающей среде. YOLOE обеспечивает высокую скорость и точность обнаружения, что критически важно для навигации в динамичных условиях. Обнаруженные объекты служат основой для планирования траектории и выбора оптимальной точки обзора, направленных на достижение целевого объекта. Использование YOLOE позволяет системе оперативно реагировать на изменения в окружении и адаптировать свою стратегию навигации, обеспечивая эффективное и надежное ориентирование в пространстве.
Подтверждение эффективности: от данных к результатам
Экспериментальные исследования продемонстрировали, что 3DGSNav достигает передовых результатов в задаче навигации к объектам в условиях нулевой адаптации, значительно превосходя существующие методы. Данная система успешно ориентируется в сложных трехмерных пространствах без предварительного обучения на конкретных сценариях, что подтверждается высокими показателями успешности на популярных наборах данных, таких как HM3Dv1 и HM3Dv2. Преимущество 3DGSNav заключается в способности эффективно планировать маршрут и адаптироваться к новым условиям, обеспечивая надежную навигацию даже в незнакомой среде. Результаты демонстрируют существенный прогресс в области робототехники и компьютерного зрения, открывая новые возможности для создания автономных систем, способных к эффективной и безопасной навигации в реальном мире.
В ходе экспериментов продемонстрировано, что разработанная система навигации достигает впечатляющего уровня успешности — до 92% — при выполнении задач на популярных наборах данных HM3Dv1 и HM3Dv2. Данный показатель, определяемый как процент успешно завершенных навигационных эпизодов, свидетельствует о высокой надежности и эффективности предложенного подхода к решению задачи ориентирования в трехмерном пространстве. Такой уровень успешности значительно превосходит результаты, демонстрируемые существующими аналогами, и подтверждает перспективность использования данной технологии в различных областях, включая робототехнику и виртуальную реальность.
В ходе экспериментов, разработанная система продемонстрировала впечатляющий показатель Success Weighted by Inverse Path Length (SPL) — 32.08%. Данный метрик, учитывающий как успешность навигации, так и её эффективность по длине пройденного пути, значительно превосходит аналогичные показатели, достигнутые в существующих методах. Более высокий SPL указывает на способность системы не только достигать заданной цели, но и находить оптимальный, кратчайший маршрут, что особенно важно в сложных и динамичных средах. Полученный результат подтверждает эффективность предложенного подхода к решению задачи навигации и открывает перспективы для его применения в различных областях, требующих автономного перемещения роботов.
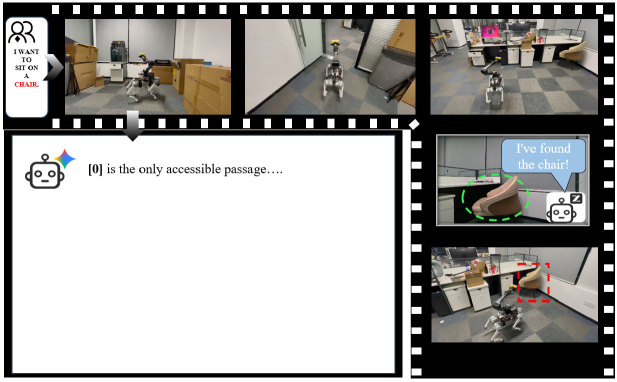
В ходе реальных испытаний с использованием четвероногого робота, разработанная система 3DGSNav продемонстрировала впечатляющий уровень успешности, достигнув приблизительно 83.3% на шести различных уровнях сложности. Данный результат свидетельствует о высокой адаптивности и надежности алгоритма в условиях реального мира, где присутствуют непредсказуемые факторы и погрешности, неизбежные для симуляций. Успешное преодоление различных уровней сложности подтверждает способность системы эффективно планировать маршруты и ориентироваться в пространстве, обеспечивая стабильную навигацию даже в сложных и динамичных условиях. Полученные данные указывают на перспективность использования 3DGSNav для широкого спектра роботизированных приложений, требующих автономной навигации в реальном окружении.
Внедрение метода удаления виртуальных точек обзора позволило добиться значительного повышения эффективности навигации. Исследования показали, что данный подход привел к снижению показателя Success Weighted by Inverse Path Length (SPL) на 25.47%. Это указывает на то, что система способна находить более оптимальные и короткие пути к цели, минимизируя общую длину траектории. Уменьшение SPL свидетельствует о более разумном планировании маршрута и, как следствие, о повышении общей производительности системы навигации в сложных средах.
Взгляд в будущее: к разумным машинам
Дальнейшие исследования сосредоточены на расширении возможностей 3DGSNav для работы в более сложных и разнообразных средах, а также для решения более сложных задач. Предстоит преодолеть ограничения, связанные с динамическими изменениями в окружении, непредсказуемыми препятствиями и необходимостью планирования траекторий в реальном времени. Успешное масштабирование системы предполагает разработку алгоритмов, способных эффективно обрабатывать большие объемы данных, оптимизировать использование ресурсов и адаптироваться к новым условиям. В конечном итоге, расширение функциональности 3DGSNav позволит создавать роботов, способных к автономной навигации в широком спектре реальных сценариев, что существенно продвинет область искусственного интеллекта и робототехники.
Исследования направлены на разработку методов непрерывного обучения и адаптации для роботов, позволяющих им совершенствовать навыки навигации со временем. В отличие от традиционных систем, требующих перепрограммирования при изменении окружающей среды, предполагается создание роботов, способных самостоятельно извлекать уроки из опыта и адаптироваться к новым условиям. Это достигается за счет использования алгоритмов машинного обучения, которые позволяют роботу накапливать знания о мире и использовать их для улучшения своих навигационных стратегий. Подобный подход открывает возможности для создания роботов, способных функционировать в динамичных и непредсказуемых средах, таких как жилые дома, офисы или даже улицы города, без постоянного вмешательства человека, что значительно расширяет сферу их применения и повышает их автономность.
Интеграция системы 3DGSNav с другими ключевыми возможностями робототехники, такими как манипулирование объектами и взаимодействие с окружающей средой, открывает путь к созданию действительно универсальных и автономных роботов. Вместо того чтобы ограничиваться лишь навигацией, будущие роботы смогут, например, самостоятельно перемещаться по сложной обстановке, находить необходимые предметы и взаимодействовать с ними, выполняя широкий спектр задач — от помощи по дому до работы в производственных условиях. Такой симбиоз навигационных способностей и умения действовать в физическом мире позволит роботам адаптироваться к непредвиденным обстоятельствам, решать сложные проблемы и действовать более эффективно, приближая эру по-настоящему интеллектуальных машин, способных к полноценному взаимодействию с человеком и окружающим миром.
В конечном итоге, представленное исследование вносит значительный вклад в амбициозную задачу создания роботов, способных беспрепятственно ориентироваться и взаимодействовать с окружающим миром. Разработка систем, позволяющих роботам эффективно функционировать в реальных условиях, открывает широкие перспективы для улучшения качества жизни людей. От помощи в повседневных задачах и автоматизации рутинных процессов до поддержки в опасных или труднодоступных средах — возможности применения таких технологий практически безграничны. В перспективе, это может привести к появлению роботов-помощников, способных оказывать поддержку в различных сферах деятельности, от здравоохранения и образования до логистики и производства, значительно расширяя возможности человека и повышая его продуктивность.
Исследование демонстрирует, что системы навигации, подобные 3DGSNav, не просто инструменты для достижения цели, а сложные экосистемы, в которых восприятие и рассуждение тесно переплетены. Подход, использующий 3D Gaussian Splatting для улучшения пространственного понимания, подтверждает идею о том, что архитектурные решения предсказывают будущие сбои — неточность восприятия может привести к полной неудаче навигации. Как заметила Ада Лавлейс: «Я убеждена, что этот двигатель способен перерабатывать всё, что можно выразить в алгебраической форме». Эта фраза, хоть и относится к вычислительной машине, удивительно точно отражает суть 3DGSNav: преобразование визуальной информации в структурированное, понятное для системы представление, позволяющее ей успешно ориентироваться в сложных условиях.
Что Дальше?
Представленная работа, безусловно, демонстрирует потенциал интеграции 3D Gaussian Splatting и Vision-Language Models для навигации. Однако, следует признать: попытка построить «разумную» систему навигации — это всегда пророчество о будущей неудаче. Каждая архитектурная деталь — это предположение о том, какие типы хаоса система сможет выдержать. Пространственное рассуждение, улучшенное здесь, — это лишь временное умиротворение, иллюзия стабильности, хорошо закэшированная в параметрах модели.
Истинная проблема не в улучшении точности навигации в существующих средах, а в способности адаптироваться к принципиально новым, непредсказуемым условиям. Гарантий здесь нет, и быть не может — гарантии это лишь договор с вероятностью. Следующим шагом представляется не столько повышение разрешения 3D Gaussian Splatting, сколько исследование принципов самоорганизации и эмерджентного поведения в подобных системах.
В конечном итоге, хаос — это не сбой, а язык природы. Попытка подавить его — бессмысленна. Более перспективным представляется его принятие и использование для создания систем, способных не только ориентироваться, но и обучаться на ошибках, адаптироваться и эволюционировать в непредсказуемом мире.
Оригинал статьи: https://arxiv.org/pdf/2602.12159.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Фотографируем муравьёв с Андреем Павловым
- Honor 600 Pro ОБЗОР: чёткое изображение, отличная камера, плавный интерфейс
- Обзор объектива Tokina 11-16mm f/2.8 AF
- Nikon D7200
- Обзор Moto G Stylus 5G (2024)
- Honor 600 ОБЗОР: лёгкий, плавный интерфейс, скоростная зарядка
- Realme 16T ОБЗОР: яркий экран, плавный интерфейс, большой аккумулятор
- Как правильно обрабатывать портрет в фотошоп
- Что купить фотографу. Рекомендации
- Обзор Nikon D5500 DX
2026-02-14 05:54