Автор: Денис Аветисян
Исследователи продемонстрировали, как искусственно управляемые отражающие поверхности могут расширить возможности радиолокации в условиях прямой невидимости.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"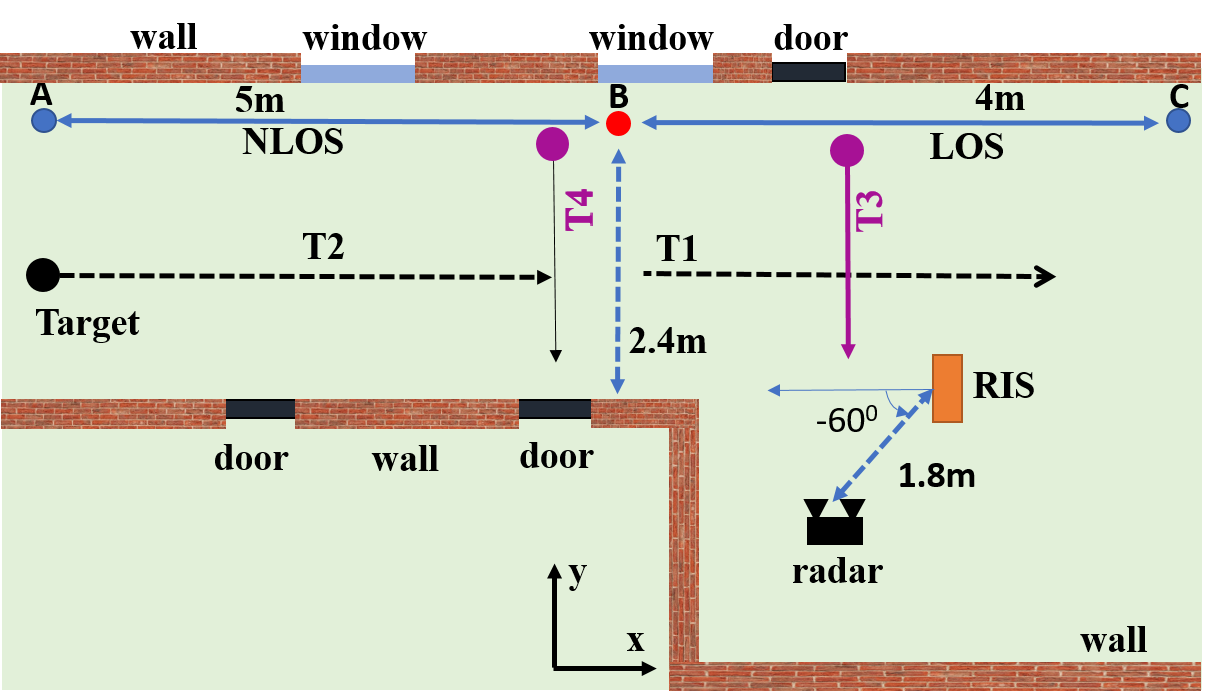
В статье рассматривается применение реконфигурируемых интеллектуальных поверхностей (RIS) для повышения эффективности радиолокационного зондирования в сценариях, где прямая видимость отсутствует.
Обнаружение целей в условиях непрямой видимости представляет собой сложную задачу для современных радиолокационных систем. В работе, посвященной ‘Around-the-corner Radar Sensing Using Reconfigurable Intelligent Surface’, исследуется возможность повышения эффективности радиолокационного обнаружения целей за углами, используя многолучевое распространение сигнала. Показано, что применение реконфигурируемой интеллектуальной поверхности (RIS) позволяет направлять отраженные сигналы в невидимые области, значительно усиливая слабые многолучевые отражения. Может ли стратегическое развертывание RIS стать ключом к созданию надежных систем радиолокационного обнаружения в сложных условиях, например, для систем безопасности и автомобильных предупреждений?
Раскрывая Движение: Основа Радиолокационного Зондирования
Точность обнаружения целей напрямую зависит от понимания фундаментального принципа эффекта Доплера — изменения частоты волны, вызванного относительным движением источника и наблюдателя. Этот эффект проявляется в смещении частоты принимаемого сигнала: при сближении объекта частота увеличивается, а при удалении — уменьшается. f' = f(v \pm v_o)/v, где f — исходная частота, v — скорость распространения волны, v_o — скорость источника или наблюдателя. Именно это изменение частоты позволяет радарам «видеть» движущиеся объекты, даже если они скрыты за препятствиями или неподвижны. Анализ этого смещения позволяет определить скорость и направление движения цели, что является ключевым для различных применений, от автоматического управления транспортом до метеорологических наблюдений.
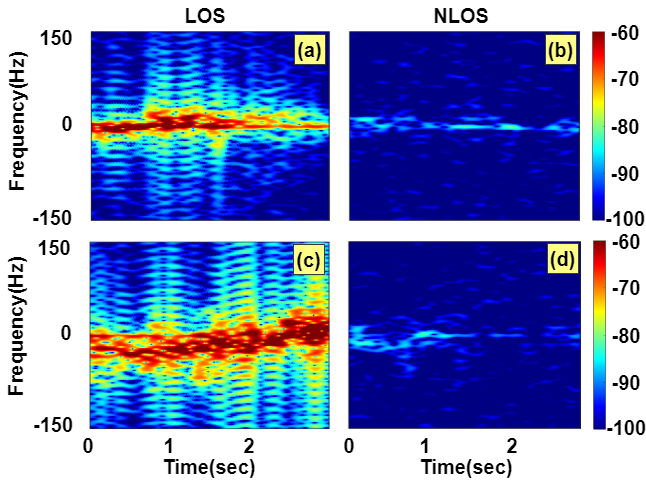
Анализ изменений частоты, вызванных движением объекта, становится возможен благодаря применению методов, таких как кратковременное преобразование Фурье (STFT). Этот математический инструмент позволяет разложить сигнал во времени и частоте, выявляя мельчайшие изменения, связанные с движением цели. В результате обработки данных, полученных с помощью STFT, формируются микро-допплеровские спектрограммы — наглядные графические представления, отображающие динамику движения объекта. Эти спектрограммы, по сути, являются «отпечатками» движения, позволяющими не только определить наличие цели, но и проанализировать характер её перемещения, включая скорость, направление и даже сложные траектории, которые могли бы остаться незамеченными при обычном анализе.
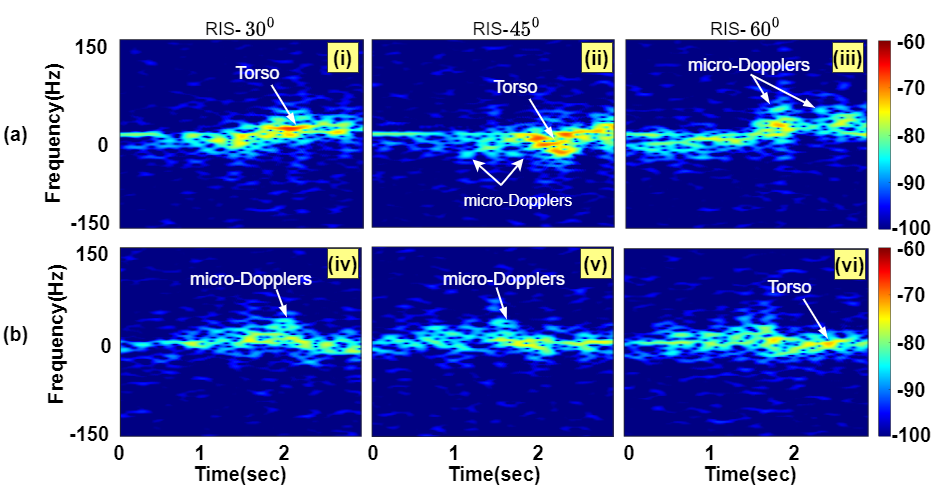
Микро-допплеровские спектрограммы играют ключевую роль в определении траекторий движения целей, представляя собой визуальное отображение изменений частоты, вызванных движением объекта. Эти спектрограммы позволяют не только идентифицировать прямолинейное радиальное движение, но и анализировать более сложные траектории, скрытые от прямой видимости. Анализируя характерные паттерны на спектрограмме, можно реконструировать движение цели даже при наличии препятствий или при движении под углом к сенсору. Например, вращающиеся лопасти вертолета или шагающие движения человека создают уникальные микро-допплеровские сигнатуры, позволяющие точно определить тип и направление движения цели, даже если сама цель частично скрыта за объектами. Таким образом, микро-допплеровские спектрограммы являются мощным инструментом для расширения возможностей радиолокационного обнаружения и отслеживания, обеспечивая надежное определение траекторий в сложных условиях.
За Пределами Прямой Видимости: Радиолокация за Углом
Традиционные радиолокационные системы испытывают ограничения в условиях непрямой видимости (Non-Line-of-Sight, NLOS), когда цели находятся за препятствиями, блокирующими прямой радиосигнал. В таких сценариях, отраженный или рассеянный сигнал от препятствия ослабляется, что значительно снижает дальность обнаружения и точность определения координат цели. Эффективность работы радара напрямую зависит от возможности прямого приема отраженного сигнала от объекта; при наличии препятствий, большая часть энергии сигнала теряется или искажается, что приводит к ложным срабатываниям или невозможности обнаружения цели. Данное ограничение особенно актуально в городских условиях, внутри зданий и в лесистой местности, где наличие многочисленных отражающих поверхностей и препятствий существенно снижает эффективность традиционных радиолокационных систем.
Радар, способный обнаруживать объекты за пределами прямой видимости, представляет собой решение проблемы обнаружения целей в условиях непрямой видимости (NLOS). Данная технология использует отраженные радиоволны для «освещения» скрытых объектов, позволяя регистрировать их местоположение даже при отсутствии прямой радиосвязи между радаром и целью. В отличие от традиционных радаров, полагающихся на прямое распространение сигнала, радары, работающие за пределами прямой видимости, анализируют косвенные отражения от различных поверхностей, таких как стены, транспортные средства или другие объекты окружающей среды, для определения местонахождения цели. Эффективность обнаружения зависит от характеристик отражающих поверхностей и геометрии окружающей среды.
Возможность обнаружения объектов за препятствиями реализуется за счет манипулирования распространением радиоволн, что позволяет направлять их на скрытые цели. Это достигается за счет использования явлений отражения, преломления и дифракции, а также за счет применения специальных антенных решеток и алгоритмов обработки сигналов. Контролируемое изменение фазы и амплитуды излучаемых волн позволяет формировать направленный луч, огибающий препятствия и достигающий интересующего объекта. В некоторых системах применяются метаматериалы для управления характеристиками распространения радиоволн и повышения эффективности «огибания» углов и препятствий.

Реконфигурируемый Интеллект: Преимущество РИП
Реконфигурируемые интеллектуальные поверхности (РИП) состоят из метаповерхностных элементарных ячеек, спроектированных с субволновой точностью для управления электромагнитными волнами. Каждая ячейка представляет собой микроструктуру, оптимизированную для изменения фазы и амплитуды отраженного сигнала посредством манипулирования электромагнитными свойствами материалов на масштабе, меньшем длины волны. Такая конструкция позволяет РИП формировать и направлять электромагнитное излучение с высокой точностью, обеспечивая контроль над распространением радиоволн и улучшая характеристики беспроводной связи.
Каждый элемент реконфигурируемой поверхности (RIS) содержит PIN-диод, который обеспечивает динамическое управление фазой и амплитудой отраженных электромагнитных волн. Изменяя состояние PIN-диода, можно контролировать отражение сигнала от каждого элемента, формируя направленный луч. Этот принцип позволяет точно управлять направлением отраженного сигнала, осуществляя электронное формирование луча без механического перемещения антенн. Возможность независимого управления каждым элементом позволяет реализовать сложные схемы формирования луча, необходимые для компенсации затухания сигнала и улучшения качества связи в сложных условиях распространения радиоволн.
Прецизионное управление электромагнитными волнами, обеспечиваемое реконфигурируемыми интеллектуальными поверхностями (РИП), является ключевым фактором реализации радаров, способных обнаруживать цели за препятствиями (“Радиолокация за Углом”). Данная технология позволяет обходить ограничения прямой видимости (NLOS) путем перенаправления сигнала, что обеспечивает точное определение траекторий целей T1, T2 и T4. Точное управление фазой и амплитудой отраженных волн позволяет компенсировать искажения сигнала, вызванные отражениями и дифракцией, и восстановить информацию о местоположении и скорости движущихся объектов, находящихся вне прямой видимости радара.
Реконфигурируемая интеллектуальная поверхность (РИП) функционирует на частоте радара 5,5 ГГц, демонстрируя относительную полосу пропускания 18,51%. Трехдецибельная ширина луча составляет 11-12 градусов для наклонных падающих лучей. Физические размеры РИП составляют 256 x 160 мм и состоят из массива из 16×10 элементарных ячеек. Частота дискретизации радара установлена на уровне 370 Гц для предотвращения эффекта наложения спектров (aliasing).
Будущее Зондирования: Интеллектуальный и Адаптивный Радар
Радары, усиленные реконфигурируемыми интеллектуальными поверхностями (РИП), демонстрируют значительные преимущества в сложных условиях, особенно когда необходимо обнаружить объекты в загроможденных или труднодоступных пространствах. В отличие от традиционных радаров, которые сталкиваются с проблемами отражения и рассеяния сигналов от препятствий, системы с РИП способны направлять радиоволны вокруг этих помех, создавая виртуальные прямые пути к цели. Это достигается за счет точной настройки элементов РИП, которые динамически изменяют фазу и амплитуду отраженного сигнала, усиливая полезный сигнал и подавляя нежелательные интерференции. Такая адаптивность обеспечивает более надежное и точное обнаружение целей, даже в условиях сильных помех и ограниченной видимости, открывая новые возможности для применения в различных областях, включая автономную навигацию и поисково-спасательные операции.
Реконфигурируемые интеллектуальные поверхности (РИП) открывают новые возможности в области радаров благодаря способности динамически формировать диаграмму направленности. Вместо традиционного излучения энергии во всех направлениях, РИП позволяет точно фокусировать радиоволны на конкретных объектах, даже если они находятся за препятствиями или в сложных условиях. Это достигается за счет изменения электромагнитных свойств поверхности в режиме реального времени, что позволяет адаптироваться к меняющейся обстановке и минимизировать помехи. Благодаря этой адаптивности, система может одновременно отслеживать несколько целей, повышая точность и надежность обнаружения, и существенно расширяя возможности радара в различных сферах применения, от автономной навигации до мониторинга инфраструктуры.
Технология, основанная на реконфигурируемых интеллектуальных поверхностях (РИП), открывает широкие перспективы для различных областей применения. В частности, системы автономной навигации смогут более надежно ориентироваться в сложных городских условиях и при плохой видимости, благодаря способности РИП формировать направленный сигнал и обходить препятствия. В сфере поисково-спасательных операций, адаптивное управление радаром позволит обнаруживать пострадавших в труднодоступных местах, например, под завалами или в густой растительности. Не менее значимо применение в мониторинге инфраструктуры, где точное и детальное сканирование позволит выявлять дефекты и повреждения мостов, зданий и других объектов, обеспечивая их безопасность и долговечность. Возможность динамически настраивать радиолокационный сигнал в соответствии с окружающей средой делает данную технологию незаменимой для решения широкого круга задач, требующих высокой точности и надежности.
Дальнейшие исследования в области материалов для реконфигурируемых интеллектуальных поверхностей (РИП), а также оптимизация конструкции элементарных ячеек и алгоритмов управления, представляют собой ключевые направления для раскрытия полного потенциала интеллектуальных радиолокационных систем. Усовершенствование материалов позволит создавать РИП с более высокой эффективностью отражения и более широким диапазоном рабочих частот. Совершенствование конструкции элементарных ячеек, включая их миниатюризацию и повышение гибкости, откроет возможности для интеграции РИП в различные среды и приложения. Разработка продвинутых алгоритмов управления, способных к адаптации в реальном времени к изменяющимся условиям и оптимизации характеристик радиолокационного сигнала, позволит значительно повысить точность обнаружения целей и устойчивость к помехам, расширяя возможности применения в автономной навигации, поисково-спасательных операциях и мониторинге инфраструктуры.
Исследование демонстрирует, что применение конфигурируемых интеллектуальных поверхностей (RIS) открывает новые возможности для радиолокационного зондирования за углом, преодолевая ограничения прямой видимости. Эта работа подчеркивает, что порядок возникает не из централизованного контроля, а из локальных правил взаимодействия сигнала с RIS, создавая благоприятные условия для обнаружения целей. Как заметил Ральф Уолдо Эмерсон: «Не подражайте, не повторяйте, но будьте причиной». Подобно тому, как RIS изменяет распространение сигнала, создавая новые пути, так и инновационный подход к зондированию, представленный в статье, требует отхода от традиционных методов и поиска новых путей для достижения более надежного обнаружения целей в сложных условиях распространения, используя многолучевое распространение.
Куда же дальше?
Представленная работа демонстрирует возможность обхода ограничения прямой видимости при радиолокации посредством использования конфигурируемой интеллектуальной поверхности (КИП). Однако, следует признать, что усиление сигнала — лишь один аспект сложной картины. Настоящая проблема заключается не в том, чтобы «увидеть» за углом, а в интерпретации полученной информации. Микродоплеровские сигналы, искаженные многолучевым распространением, требуют всё более изощренных алгоритмов обработки, чтобы отделить полезный сигнал от шума, порождаемого самой же системой управления отражением.
Попытки «контроля» распространения радиоволн неизбежно сталкиваются с энтропией среды. Вместо стремления к идеальному формированию луча, представляется более перспективным изучение самоорганизующихся систем, где локальные правила взаимодействия между КИП и окружением приводят к возникновению желаемого эффекта. Порядок не нуждается в архитекторе; он возникает из взаимодействия. Влияние на процесс, а не управление им — вот где кроется истинный потенциал.
Будущие исследования должны сосредоточиться не только на оптимизации характеристик КИП, но и на разработке адаптивных алгоритмов обучения, способных учитывать динамические изменения в окружающей среде и компенсировать неизбежные искажения сигнала. Иначе, все усилия по «управлению» радиолокационным каналом рискуют обернуться лишь иллюзией контроля над хаотичным миром отражений.
Оригинал статьи: https://arxiv.org/pdf/2602.11471.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Как правильно закрепить ремень на фотокамере
- Realme 12 Pro+ ОБЗОР: большой аккумулятор, плавный интерфейс, современный дизайн
- 20 основных команд командной строки Windows 11, которые должен знать каждый пользователь
- vivo iQOO Z11x ОБЗОР: яркий экран, плавный интерфейс, большой аккумулятор
- Honor 600 ОБЗОР: лёгкий, плавный интерфейс, скоростная зарядка
- Фотографируем муравьёв с Андреем Павловым
- Преодолевая границы масштабируемости рекомендательных систем
- Cooler Master запускает комплект вертикального крепления видеокарты PCIe 5.0 за около 70 долларов в Китае.
- Oppo K14 ОБЗОР: яркий экран, удобный сенсор отпечатков, плавный интерфейс
2026-02-14 17:26