Автор: Денис Аветисян
Исследование показывает, как совместное использование социального робота и носимого устройства может улучшить ориентирование в пространстве и снизить когнитивную нагрузку.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"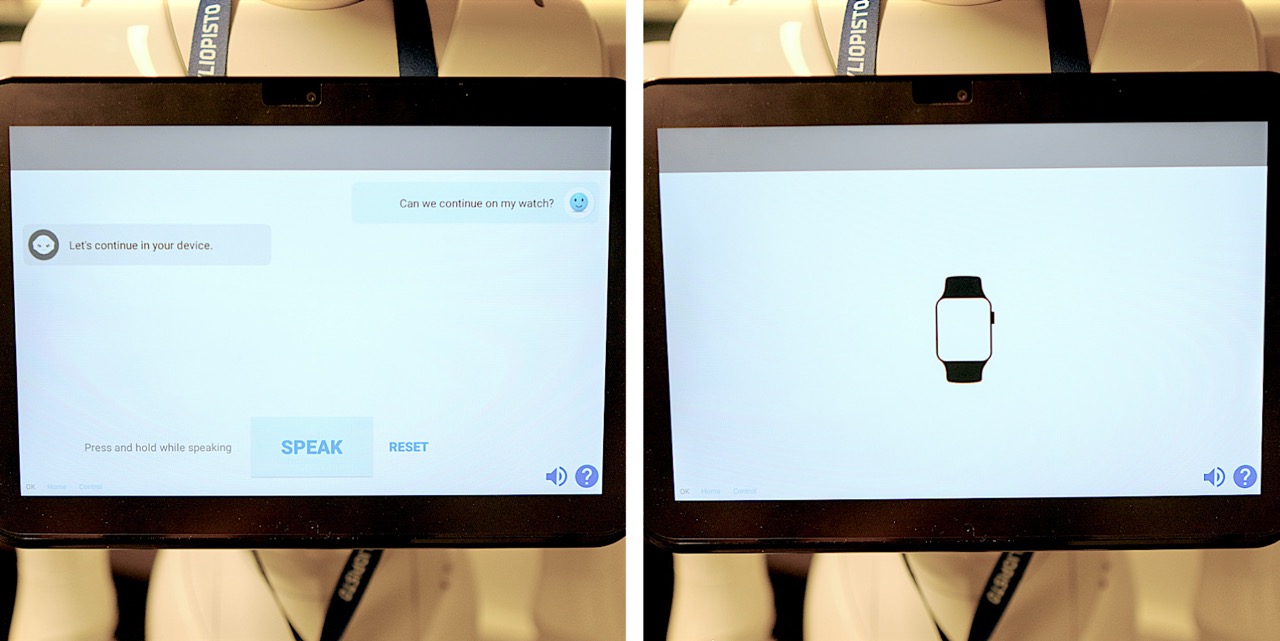
В статье рассматривается возможность передачи управления диалогом между роботом и смарт-часами для обеспечения интуитивной навигации в помещениях.
Навигация в сложных внутренних пространствах, таких как университеты или больницы, требует значительных когнитивных усилий и отвлекает пользователя. В данной работе, посвященной теме ‘Robot-Wearable Conversation Hand-off for Navigation’, исследуется возможность передачи управления навигацией между социальным роботом и носимым устройством посредством диалогового взаимодействия. Полученные результаты, основанные на исследовании с участием \mathcal{N}=24 испытуемых, показали, что хотя предпочтение отдается использованию только носимого устройства, передача диалога может эффективно распределять когнитивную нагрузку. Каким образом можно оптимизировать стратегии ре-воплощения искусственного интеллекта для создания более интуитивных и полезных систем поддержки навигации в будущем?
Избегая избыточности: вызовы внутренней навигации
Традиционные системы внутренней навигации, как правило, требуют предварительного создания подробных карт помещения, что является трудоемким и дорогостоящим процессом. Необходимость постоянного обновления этих карт при малейших изменениях в планировке — например, при перестановке мебели или временном строительстве — значительно усложняет обслуживание и поддержку системы. По сути, каждая новая или модифицированная локация требует повторной, кропотливой работы по картографированию, что делает подобные решения непрактичными для динамичных сред, таких как торговые центры, больницы или офисные пространства с часто меняющейся конфигурацией. В результате, существующие технологии часто оказываются негибкими и неспособными адаптироваться к реальным условиям, ограничивая их применимость и вызывая необходимость в более эффективных и экономичных подходах к внутренней навигации.
Исследования показывают, что современные системы навигации внутри помещений часто создают значительную когнитивную нагрузку у пользователей. Сложные визуальные инструкции, абстрактные карты и необходимость постоянного отслеживания маршрута приводят к перегрузке внимания и снижению способности ориентироваться в пространстве. Это, в свою очередь, порождает недоверие к системе: пользователь, испытывающий затруднения при следовании инструкциям, начинает сомневаться в их точности и надежности, что снижает готовность к дальнейшему использованию технологии. Неспособность системы учитывать индивидуальные особенности восприятия и предпочтения пользователя усугубляет проблему, приводя к ощущению дезориентации и фрустрации.
Эффективная навигация в помещениях требует разработки решений, которые минимизируют когнитивную нагрузку на пользователя и одновременно обеспечивают высокую надежность и способность к адаптации. Традиционные системы часто перегружают человека сложными инструкциями и требуют постоянного внимания к карте, что снижает удобство использования. Поэтому, современные исследования направлены на создание интуитивно понятных интерфейсов, использующих контекстную информацию и машинное обучение для предсказания потребностей пользователя. Такие системы способны динамически подстраиваться под изменения в окружающей среде — например, перестановку мебели или временные препятствия — и предлагать оптимальные маршруты, не требуя предварительного картирования пространства. В результате, навигация становится более плавной, естественной и доступной для широкого круга пользователей, включая людей с ограниченными возможностями.

Разговорный интерфейс: преодолевая разрыв с помощью искусственного интеллекта
В основе системы взаимодействия с пользователем лежит разговорный агент (CA), выступающий в роли основного интерфейса. CA обеспечивает интуитивно понятное и естественное взаимодействие, позволяя пользователю получать инструкции и навигационные подсказки в форме диалога. Реализация CA позволяет отказаться от сложных меню или графических интерфейсов, делая процесс ориентации в пространстве более доступным и удобным. Алгоритмы обработки естественного языка (NLP) позволяют агенту понимать запросы пользователя, сформулированные в свободной форме, и предоставлять релевантные ответы и указания.
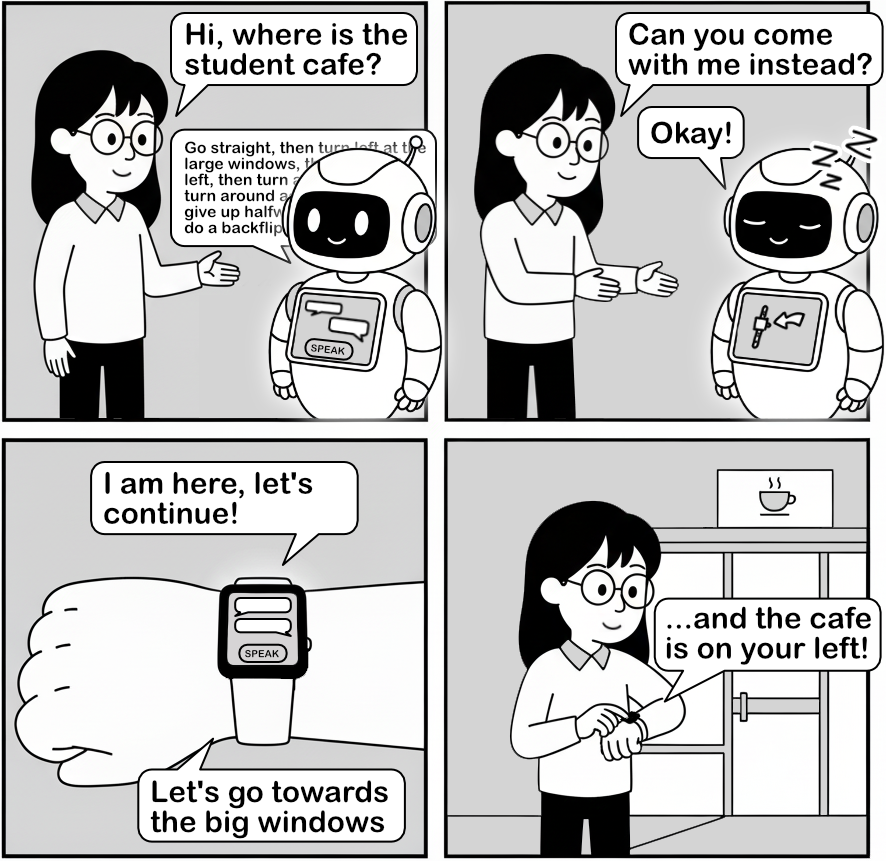
В системе используется стационарный Социальный Робот в качестве первоначальной платформы для размещения Конверсационного Агента (CA). Это позволяет установить контекст навигации для пользователя и предоставить начальные инструкции в фиксированной, легко идентифицируемой точке. Робот служит отправной точкой взаимодействия, обеспечивая визуальную и аудиальную информацию, необходимую для понимания задач и целей навигации, прежде чем управление перейдет на носимое устройство. Использование стационарной платформы гарантирует, что пользователь получит четкие и однозначные начальные указания в начале сеанса.
Для обеспечения непрерывной поддержки пользователей, управление системой переносится с неподвижного социального робота на носимое устройство. Этот процесс передачи осуществляется бесшовно, что позволяет избежать прерывания взаимодействия и обеспечивает постоянное сопровождение пользователя в процессе навигации и выполнения задач в окружающей среде. Передача контроля гарантирует, что функциональность Conversational Agent (CA) остается доступной независимо от местоположения или мобильности пользователя, что повышает эффективность и удобство использования системы.
Плавные переходы и адаптивное сопровождение
Процесс передачи диалога разработан для обеспечения плавного и незаметного перехода между устройствами, что минимизирует прерывания взаимодействия с пользователем и поддерживает его вовлеченность. Это достигается за счет синхронизации контекста разговора и непрерывной передачи релевантной информации между социальным роботом и носимым устройством. Система отслеживает текущую тему обсуждения, историю команд и предпочтения пользователя, чтобы обеспечить последовательное и логичное продолжение диалога вне зависимости от того, какое устройство в данный момент осуществляет взаимодействие. Эффективная передача контекста позволяет избежать повторения вопросов или необходимости переформулировать запросы, что значительно улучшает пользовательский опыт.
Передача управления между социальным роботом и носимым устройством напрямую поддерживает проксемическое взаимодействие, позволяя системе адаптироваться к физическому пространству и социальному контексту пользователя. Это достигается за счет постоянного обмена данными о местоположении, ориентации и активности пользователя между устройствами. Например, если пользователь покидает зону действия робота, управление автоматически переходит на носимое устройство, обеспечивая непрерывность взаимодействия. Система также учитывает социальный контекст, определяя, находится ли пользователь в общественном месте или в приватной обстановке, и соответствующим образом регулирует громкость и тип предоставляемой информации. Такая адаптация позволяет избежать нарушения личного пространства и обеспечить комфортное взаимодействие в различных ситуациях.
Как социальный робот, так и носимое устройство используют технологии распознавания речи для точной интерпретации пользовательских команд и предоставления соответствующей помощи. Данная функциональность критически важна для обеспечения бесперебойного взаимодействия, поскольку позволяет системе понимать естественную речь пользователя, даже в условиях фонового шума или различных акцентов. Реализация включает в себя алгоритмы обработки аудиосигнала, фонетическое моделирование и языковое моделирование, обеспечивающие высокую точность распознавания и минимизацию ошибок. Для повышения надежности применяются методы адаптации к голосу конкретного пользователя и контексту взаимодействия.

Подтверждение эффективности: снижение нагрузки и повышение надежности
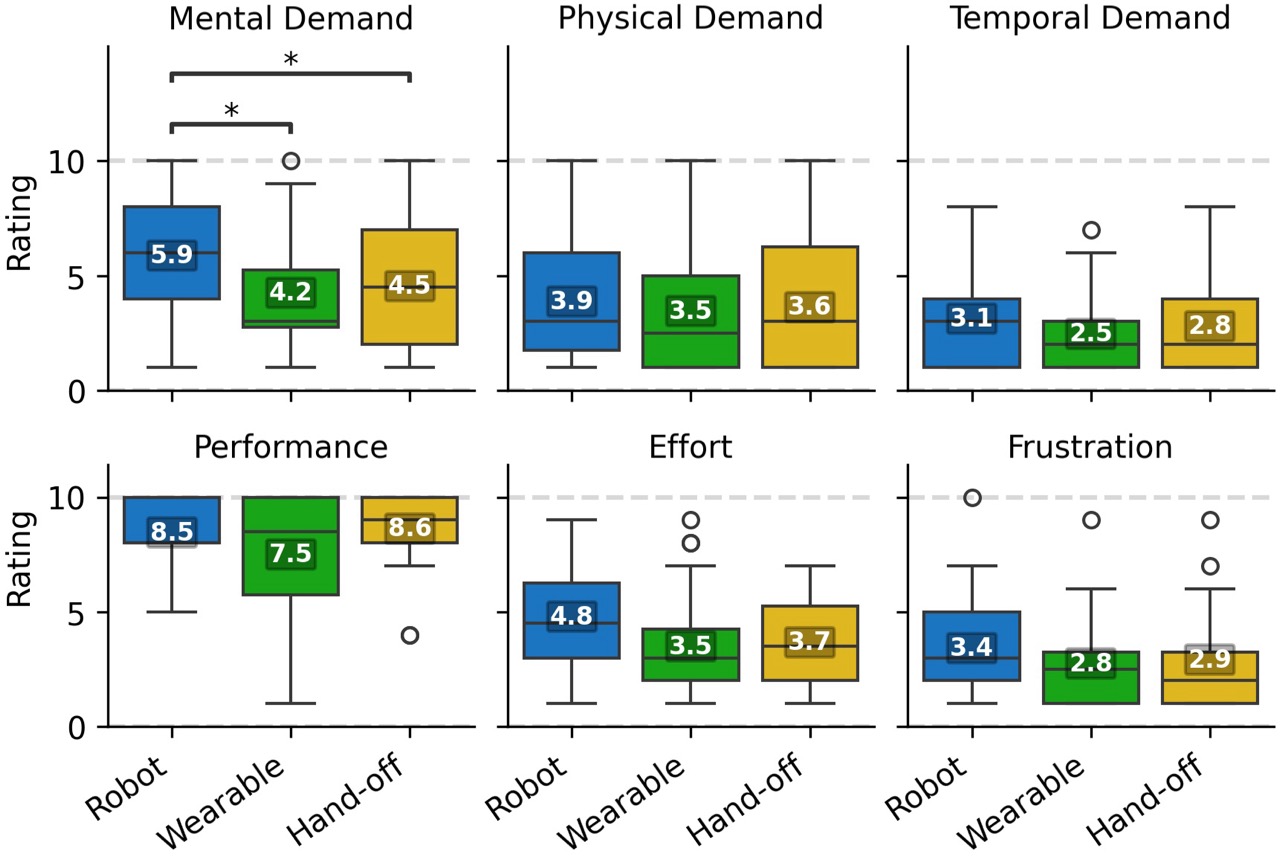
Исследование, проведенное с использованием опросника NASA-RTLX, не выявило статистически значимых различий во времени выполнения задач, количестве ошибок или числе взаимодействий между системой передачи управления посредством диалога и решениями, использующими одно устройство. Это говорит о том, что предложенная система не уступает по эффективности традиционным методам с точки зрения производительности и точности выполнения действий. Полученные данные свидетельствуют о том, что пользователи способны одинаково быстро и безошибочно справляться с задачами, вне зависимости от способа управления — будь то использование одного устройства или передача управления между ними посредством голосового взаимодействия.
Исследование, использующее опросник NASA-RTLX, выявило, что взаимодействие с роботизированной системой требовало значительно больших когнитивных усилий от участников, чем использование носимых устройств или системы передачи управления. Статистически значимая разница в показателях “Mental Demand” (p < 0.01) указывает на то, что выполнение задач с помощью робота требовало от испытуемых большей концентрации внимания и умственной обработки информации. Это может быть связано с необходимостью более активного отслеживания действий робота и адаптации к его поведению, что, в свою очередь, увеличивает нагрузку на когнитивные ресурсы человека.
Исследование выявило, что использование робота в качестве посредника в задачах требовало от испытуемых больше усилий, согласно данным NASA-RTLX. Хотя первоначальный анализ показал тенденцию к увеличению когнитивной нагрузки в условиях с роботом, дальнейшие статистические тесты, а именно пост-хок анализ, не подтвердили эту разницу как статистически значимую. Это указывает на то, что, несмотря на субъективное ощущение большей нагрузки при взаимодействии с роботом, фактическое влияние на производительность и количество ошибок оказалось незначительным. Таким образом, в то время как робот может потребовать немного больше концентрации, он не приводит к заметному снижению эффективности выполнения задач по сравнению с другими системами.
Исследование показывает, что стремление к многообразию воплощений — робота и носимого устройства — не всегда приводит к оптимальному результату. Пользователи, как правило, предпочитают простоту носимого гаджета для навигации. Однако, предложенный способ передачи управления между роботом и часами представляет собой интересный компромисс, позволяющий распределить когнитивную нагрузку и улучшить пространственное мышление. Блез Паскаль заметил: «Все великие вещи просты, и в этом их величие». Эта простота, к которой стремится исследование, проявляется в поиске баланса между удобством и функциональностью, что особенно важно в контексте взаимодействия человека и робота. Ученые, кажется, осознают, что усложнение ради усложнения — путь в никуда, и ищут элегантные решения, облегчающие жизнь человека.
Что дальше?
Исследование, представленное в данной работе, лишь аккуратно прикоснулось к поверхности вопроса о распределённом взаимодействии человека с робототехникой. Очевидно, что предпочтение носимых систем навигации не является абсолютным. Напротив, само наличие выбора — передача управления между социальным роботом и носимым устройством — представляет интерес как способ снижения когнитивной нагрузки, хотя и не всегда достигающий оптимального результата. Важно признать, что истинная сложность заключается не в самих технологиях, а в понимании того, когда и как перераспределять внимание человека.
Будущие исследования должны сместить акцент с поиска «идеального» интерфейса на разработку систем, способных динамически адаптироваться к когнитивному состоянию пользователя и контексту окружающей среды. Простое измерение производительности навигации — недостаточно. Необходимо оценить, как подобные системы влияют на общее ощущение присутствия, на чувство контроля и, возможно, даже на спонтанные социальные взаимодействия. Иначе говоря, стоит задуматься о том, чтобы не просто «помогать» человеку ориентироваться в пространстве, а создавать условия для более осмысленного и гармоничного взаимодействия с ним.
Ясность — это минимальная форма любви. И в данном контексте, ясность заключается в признании ограниченности наших текущих методов оценки. Пока мы стремимся к техническому совершенству, стоит помнить, что истинное мастерство заключается в умении отбросить всё лишнее, оставив лишь суть.
Оригинал статьи: https://arxiv.org/pdf/2602.14831.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Lenovo Legion Y70 (2026) ОБЗОР: скоростная зарядка, чёткое изображение, много памяти
- Лучшие смартфоны. Что купить в июне 2026.
- Фотографируем муравьёв с Андреем Павловым
- Что купить фотографу. Рекомендации
- Обзор объектива Tokina 11-16mm f/2.8 AF
- Неважно, на что вы фотографируете!
- Blackview Oscal Tiger 12 ОБЗОР: большой аккумулятор, плавный интерфейс, быстрый сенсор отпечатков
- Honor Play 80 Pro ОБЗОР: плавный интерфейс, большой аккумулятор, удобный сенсор отпечатков
- Motorola Moto G47 ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, большой аккумулятор
- Honor 600 ОБЗОР: лёгкий, плавный интерфейс, скоростная зарядка
2026-02-17 11:07