Автор: Денис Аветисян
Новый подход к объединению визуальной и тактильной информации позволяет роботам выполнять сложные манипуляции с высокой точностью и надежностью.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"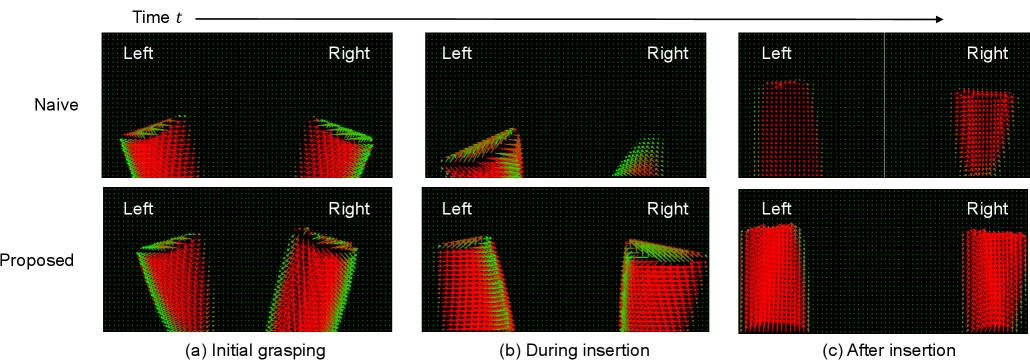
В статье представлена методика симметрической интеграции визуальных и тактильных данных с использованием двусторонних оценок силы для повышения эффективности роботизированных операций вставки.
Несмотря на прогресс в области робототехники, точное выполнение задач манипулирования, требующих тактильного взаимодействия, остается сложной проблемой. В работе ‘Symmetry-Aware Fusion of Vision and Tactile Sensing via Bilateral Force Priors for Robotic Manipulation’ предложен новый подход к объединению визуальной и тактильной информации, основанный на архитектуре Cross-Modal Transformer и регуляризации, учитывающей принцип баланса двусторонних сил. Эксперименты на бенчмарке TacSL показали, что предложенный метод обеспечивает высокую точность выполнения задач вставки, приближаясь к результатам, достигнутым с использованием данных о контактных усилиях. Позволит ли дальнейшее развитие принципов физически обоснованного мультимодального обучения создать действительно «чувствительных» роботов, способных к адаптивному и надежному манипулированию в реальных условиях?
Сложность манипулирования с обратной связью
Роботизированные операции, связанные с физическим контактом, такие как сборка или введение одного объекта в другой, предъявляют значительно более высокие требования к точности восприятия и управления, чем те, которые могут быть удовлетворены исключительно визуальным контролем. В то время как зрение позволяет определить общую картину и приблизительное положение объектов, успешное выполнение операций, требующих контакта, нуждается в детальной информации о силах соприкосновения, геометрии поверхности и микроскопических изменениях положения. Визуальные системы зачастую не способны уловить эти нюансы, особенно в условиях неидеального освещения или при наличии препятствий, что приводит к неустойчивости и ошибкам в процессе манипулирования. Таким образом, для надежного и точного выполнения контактных задач требуется интеграция дополнительных сенсорных модальностей, способных предоставить информацию, недоступную для зрения.
Традиционные подходы к управлению роботами, особенно в задачах, требующих физического контакта, часто сталкиваются с трудностями при одновременной обработке тактильной и визуальной информации. Несмотря на значительные успехи в каждой из этих областей по отдельности, их интеграция оказывается сложной проблемой. Например, робот может «видеть» отверстие для сборки, но не ощущать, когда деталь правильно вставлена или когда возникает сопротивление. Это приводит к хрупкости системы — небольшие отклонения в освещении, геометрии детали или силе трения могут вызвать сбой. Неспособность эффективно объединить данные от различных сенсоров делает роботов уязвимыми к неопределенности окружающей среды и ограничивает их способность к надежному выполнению задач, требующих точного манипулирования и адаптации к изменяющимся условиям.
Для успешного решения задач манипулирования с частыми контактами необходимы надежные методы объединения информации, поступающей из различных источников, и адаптации к неопределенным условиям окружающей среды. Использование лишь визуальных данных часто оказывается недостаточным, поэтому интеграция тактильной информации становится критически важной. Эффективное слияние этих модальностей позволяет роботу формировать более полное представление о взаимодействии с объектами, компенсируя неточности визуального восприятия и позволяя корректировать действия в реальном времени. Разработка алгоритмов, способных учитывать неопределенность, вызванную неидеальным сенсорным восприятием и изменчивостью окружающей среды, является ключевым фактором для достижения надежной и гибкой роботизированной манипуляции, позволяющей выполнять сложные задачи даже в непредсказуемых условиях.

Слияние зрения и осязания: преодоление сенсорного разрыва
Визуально-тактильное слияние (visuo-tactile fusion) представляет собой процесс интеграции визуальных данных, получаемых с помощью камер и других оптических сенсоров, с тактильной информацией, получаемой от сенсоров силы и касания. Целью данного объединения является формирование более полной и точной картины окружающей среды для робота, что позволяет ему эффективно взаимодействовать с объектами и ориентироваться в пространстве. В отличие от использования только одного типа сенсорной информации, комбинирование визуальных и тактильных данных повышает надежность распознавания объектов, улучшает оценку их свойств (таких как форма, текстура и жесткость) и позволяет роботу адаптироваться к различным условиям окружающей среды и неопределенностям.
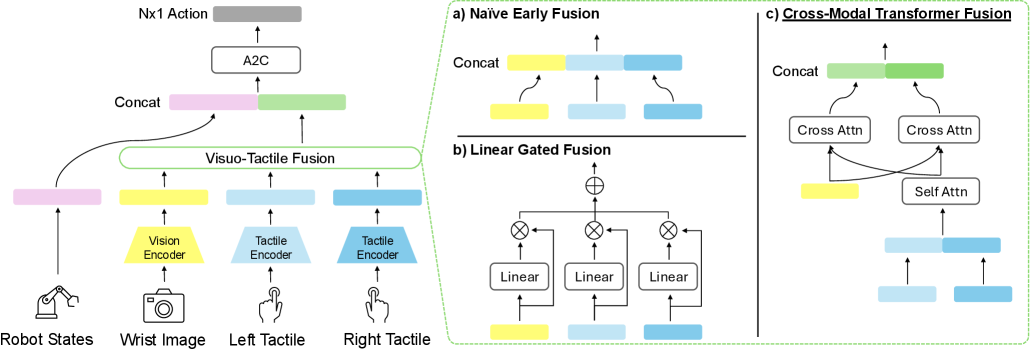
Первые подходы к слиянию визуальной и тактильной информации, такие как простое объединение (Naïve Concatenation), оказались неэффективными при моделировании сложных взаимодействий с окружающей средой. Вместо простого объединения признаков, более продвинутые методы, в частности, Gated Fusion, используют механизмы взвешивания и фильтрации входных данных. Это позволяет системе динамически определять, какие сенсорные модальности наиболее релевантны для текущей задачи и, соответственно, усиливать их вклад в процесс принятия решений, что значительно повышает точность и надежность работы робота в сложных условиях.
Метод “Force-Guided Attention” усовершенствует процесс слияния визуальной и тактильной информации, динамически взвешивая входящие сенсорные данные на основе величины приложенных контактных сил. Это позволяет системе сосредотачивать внимание на тех областях, где происходит непосредственное взаимодействие с объектами, эффективно отфильтровывая менее релевантную информацию. В частности, сенсорные данные, полученные из областей с высокой контактной силой, получают больший вес при формировании общего представления об окружающей среде, что повышает точность и эффективность робота при манипулировании объектами и навигации в сложных условиях. Такой подход позволяет более эффективно использовать вычислительные ресурсы, обрабатывая только наиболее важную информацию и игнорируя избыточную.
Кросс-модальные трансформеры: иерархический подход
Архитектура Cross-Modal Transformer (CMT) использует иерархические механизмы внимания для эффективного объединения визуальных и тактильных данных. В основе лежит применение многоуровневого внимания, позволяющего модели обрабатывать информацию с различных модальностей на разных уровнях абстракции. Само-внимание (Self-Attention) применяется для выявления взаимосвязей внутри каждой модальности (визуальной и тактильной), в то время как перекрестное внимание (Cross-Attention) устанавливает соответствия между визуальными и тактильными признаками. Такая иерархическая структура позволяет CMT эффективно фильтровать шум и выделять наиболее релевантные признаки для решения задач, требующих мультимодального восприятия и управления.
Архитектура Cross-Modal Transformer (CMT) использует механизмы самовнимания (Self-Attention) и перекрестного внимания (Cross-Attention) для выявления соответствий внутри модальностей данных (например, внутри визуальных данных) и между ними (например, между визуальными и тактильными данными). Само-внимание позволяет модели устанавливать зависимости между различными элементами внутри одной модальности, а перекрестное внимание — устанавливать связи между элементами различных модальностей. Это обеспечивает более эффективное слияние визуальной и тактильной информации, что, в свою очередь, способствует созданию надежной системы восприятия и управления, способной адаптироваться к различным условиям и шумам.
Архитектура CMT использует остаточное тактильное кодирование и регуляризацию двусторонней силы для повышения точности оценки контактных усилий и поддержания симметрии при манипуляциях. Остаточное тактильное кодирование позволяет сети эффективно обрабатывать и использовать информацию о тактильных ощущениях, дополняя визуальные данные. Регуляризация двусторонней силы, в свою очередь, способствует стабильности и точности манипуляций за счет штрафования асимметричных усилий, что особенно важно для задач, требующих точного контроля контакта и предотвращения перекосов, например, при сборке или вставке деталей.
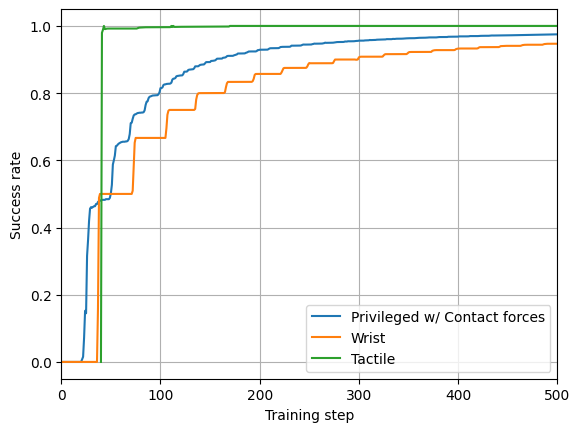
Обучение архитектуры CMT в реалистичных симуляционных средах, таких как IsaacGymEnvs, и на стандартных бенчмарках RoboNet и RLBench, продемонстрировало высокую эффективность в решении сложных задач робототехники. В частности, при выполнении задачи вставки, CMT достиг показателя успешности 96.59%, что сопоставимо с результатом, полученным при использовании конфигурации с привилегированным управлением запястьем и датчиками силы (96.09%). Данные результаты подтверждают способность архитектуры к эффективному обучению и обобщению в условиях, приближенных к реальным.
В ходе экспериментов было установлено, что архитектура Cross-Modal Transformer (CMT) в среднем требует 108.48 шагов для успешного выполнения задачи, что демонстрирует снижение количества шагов по сравнению с наивными методами объединения модальностей, где этот показатель составлял 111.63 шага. Данное уменьшение количества шагов указывает на повышение эффективности планирования и управления при использовании CMT, позволяя роботу быстрее достигать поставленной цели и оптимизировать процесс выполнения задачи.
В ходе экспериментов было установлено, что добавление данных о силе контакта к компактному представлению состояния улучшило показатель успешности операций вставки на 2.22%. Использование силы контакта в политике, основанной на визуальной информации, привело к увеличению успешности на 2.86%. Эти результаты демонстрируют значительное влияние информации о силе контакта на повышение эффективности роботов при выполнении задач манипулирования, особенно в контексте операций вставки, и подчеркивают важность интеграции мультимодальных данных для улучшения производительности.

Влияние на надёжность и адаптивность робототехники
Успешная интеграция зрительного и тактильного восприятия посредством архитектуры CMT позволяет создавать более надежные и адаптивные роботизированные системы. Данный подход обеспечивает роботам возможность эффективно функционировать в условиях неопределенности и изменчивости реального мира, что критически важно для выполнения сложных задач. Благодаря одновременной обработке визуальной информации и данных о тактильном контакте, роботы способны корректировать свои действия в режиме реального времени, избегая ошибок и обеспечивая стабильную работу даже при наличии помех или изменений в окружающей среде. В результате, системы, использующие CMT, демонстрируют повышенную устойчивость и гибкость, что открывает новые возможности для их применения в различных областях, от промышленной автоматизации до помощи человеку.
Благодаря интеграции зрения и осязания, робототехнические системы демонстрируют повышенную надежность в условиях реального мира, характеризующихся неопределенностью и изменчивостью. Способность адаптироваться к непредвиденным обстоятельствам, таким как неровные поверхности, неожиданные препятствия или изменение свойств объекта, существенно повышает эффективность работы робота. В отличие от систем, полагающихся исключительно на визуальную информацию или предопределенные траектории, данная архитектура позволяет роботу динамически корректировать свои действия, основываясь на текущих тактильных ощущениях и визуальном восприятии, что приводит к более стабильной и успешной работе даже в сложных и непредсказуемых ситуациях. Такая адаптивность особенно важна для операций, требующих высокой точности и аккуратности, а также для работы в динамически меняющейся среде.
Точное восприятие и контроль контактных усиль являются ключевым фактором для успешного функционирования роботов в широком спектре приложений. В сборке, например, это позволяет деликатно соединять детали, избегая повреждений и обеспечивая надежное соединение. В хирургии, контроль силы важен для точных манипуляций с тканями, повышая безопасность и эффективность операций. В задачах исследования, будь то подводные или космические миссии, способность ощущать и реагировать на контакт с поверхностью позволяет роботам безопасно перемещаться и собирать данные в сложных и непредсказуемых условиях. Таким образом, развитие технологий, обеспечивающих точный контроль силы, открывает новые возможности для робототехники, позволяя создавать более универсальные и надежные системы, способные успешно решать широкий круг задач в различных сферах деятельности.
Разработанная система CMT демонстрирует впечатляющую производительность, достигая скорости обработки 153 кадра в секунду при задержке всего 6.52 миллисекунды. Такая высокая пропускная способность и минимальная задержка позволяют роботу оперативно реагировать на изменения в окружающей среде и точно контролировать взаимодействие с объектами. Этот показатель имеет решающее значение для задач, требующих высокой точности и скорости, например, при сборке сложных механизмов или проведении деликатных операций, где даже незначительная задержка может привести к ошибке. Благодаря этим характеристикам система обеспечивает надежное и стабильное функционирование робота в динамичных и непредсказуемых условиях.
Дальнейшие исследования направлены на расширение возможностей данной методологии для решения более сложных задач, выходящих за рамки текущих экспериментов. Планируется интеграция с передовыми алгоритмами планирования и машинного обучения, что позволит роботам не просто реагировать на изменения в окружающей среде, но и предвидеть их, адаптируя свои действия для достижения поставленных целей. Особое внимание будет уделено разработке систем, способных к самостоятельному обучению и оптимизации стратегий взаимодействия с объектами, что откроет перспективы для создания полностью автономных роботов, способных к эффективной работе в непредсказуемых условиях. Развитие этих направлений позволит значительно повысить надежность и универсальность робототехнических систем, расширив спектр их применения в различных областях, от промышленности до медицины и освоения космоса.
Наблюдая за увлечением кросс-вниманием и физически обоснованной регуляризацией симметрии, представленными в данной работе, становится очевидно, что стремление к «близкой к эксперту» производительности — это вечная гонка. Как будто каждый новый метод визуо-тактильного слияния лишь откладывает неизбежное столкновение с суровой реальностью производственной среды. Г.Х. Харди однажды заметил: «Математика — это наука о том, что нельзя доказать». Похоже, что и в робототехнике существует некий предел, после которого даже самые изящные алгоритмы столкнутся с хаосом реального мира, где сила трения и неточность датчиков никуда не денутся. Эта работа, несомненно, продвигает границу возможного, но, как и любая «революционная» технология, рано или поздно превратится в обычный техдолг.
Что дальше?
Представленная работа, безусловно, демонстрирует элегантный способ объединения визуальной и тактильной информации. Однако, не стоит забывать, что любая «экспертная» производительность в лабораторных условиях неизбежно встретит суровую реальность производственного цеха. Симметрия, как регуляризация, — это красиво, но реальные объекты редко бывают идеально симметричными, а пыль и грязь — всегда. Вопрос не в том, что можно улучшить, а в том, что сломается первым, когда робот попытается вставить тысячу деталей в час.
Следующим шагом видится не столько усложнение архитектуры, сколько фокусировка на устойчивости к шуму и вариативности. Вместо того чтобы гнаться за «близостью к эксперту», стоит подумать о минимальном достаточном уровне производительности, который можно поддерживать стабильно. Иначе, симпатичный фреймворк станет ещё одной строкой в списке «техдолгов», которые предстоит расхлёбывать.
В конечном итоге, успех этой области будет определяться не столько количеством используемых слоёв внимания, сколько способностью системы адаптироваться к непредвиденным обстоятельствам. Если код выглядит идеально — значит, его ещё никто не запустил в реальном мире. Поэтому, вместо публикации очередного «революционного» алгоритма, было бы разумнее потратить время на создание надежной системы сбора данных о сбоях и ошибках.
Оригинал статьи: https://arxiv.org/pdf/2602.13689.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в июне 2026.
- Lenovo Legion Y70 (2026) ОБЗОР: скоростная зарядка, чёткое изображение, много памяти
- Фотографируем муравьёв с Андреем Павловым
- Обзор объектива Tokina 11-16mm f/2.8 AF
- Что купить фотографу. Рекомендации
- Honor Play 80 Pro ОБЗОР: плавный интерфейс, большой аккумулятор, удобный сенсор отпечатков
- Blackview Oscal Tiger 12 ОБЗОР: большой аккумулятор, плавный интерфейс, быстрый сенсор отпечатков
- Неважно, на что вы фотографируете!
- Honor Magic8 RSR Porsche Design ОБЗОР: замедленная съёмка видео, беспроводная зарядка, чёткое изображение
- Motorola Moto G47 ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, большой аккумулятор
2026-02-17 19:36