Автор: Денис Аветисян
Систематический обзор исследует, как большие языковые модели меняют парадигму взаимодействия человека и робота.
Обзор посвящен анализу текущего состояния исследований в области взаимодействия человека и робота с использованием больших языковых моделей, а также определению ключевых проблем и перспектив развития.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"Несмотря на стремительное развитие робототехники и искусственного интеллекта, интеграция больших языковых моделей (LLM) в системы взаимодействия человека и робота (HRI) порождает новые вызовы и требует систематизации накопленного опыта. Данное систематическое исследование, озаглавленное ‘How Do We Research Human-Robot Interaction in the Age of Large Language Models? A Systematic Review’, анализирует текущее состояние исследований в этой области, выявляя ключевые направления развития и ограничения. Полученные результаты демонстрируют, что LLM трансформируют принципы HRI, влияя на восприятие контекста, генерацию социальных взаимодействий и адаптацию роботов к потребностям человека, однако исследования остаются разрозненными в плане методологии и метрик оценки. Какие перспективные подходы и стандарты необходимы для создания более эффективных и ориентированных на человека систем HRI на основе LLM?
Предчувствие новой эры: от невнятной речи к осмысленному диалогу
Традиционные подходы к взаимодействию человека и робота (HRI) часто сталкиваются с трудностями в понимании тонкостей человеческой речи и адаптации к меняющимся ситуациям. Это приводит к тому, что пользователи испытывают разочарование и неудобство при общении с роботами, поскольку те не способны адекватно реагировать на неоднозначные запросы или учитывать контекст разговора. Неспособность роботов понимать неявные намерения или эмоциональную окраску высказываний существенно ограничивает их применимость в сложных сценариях, где требуется гибкость и эмпатия. В результате, взаимодействие становится неестественным и утомительным, подрывая доверие и эффективность совместной работы человека и машины.
Интеграция больших языковых моделей (LLM) открывает принципиально новые возможности для создания более естественного и интуитивно понятного взаимодействия человека с роботами. Рост научных публикаций в этой области демонстрирует взрывной интерес: если в 2015 году было опубликовано всего одно исследование, то к 2025 году их число достигло впечатляющей отметки в 268. Этот экспоненциальный рост свидетельствует о признании потенциала LLM в преодолении ограничений традиционных подходов к человеко-роботному взаимодействию и формировании нового поколения роботов, способных к более гибкому и осмысленному общению.
Внедрение больших языковых моделей (LLM) коренным образом меняет взаимодействие человека и робота, позволяя машинам выйти за рамки жестко запрограммированных сценариев. Ранее роботы полагались на заранее определенные реакции, что ограничивало их способность адаптироваться к непредсказуемым ситуациям и понимать нюансы человеческой речи. Теперь, благодаря LLM, роботы способны понимать естественный язык, вести полноценные диалоги и учитывать контекст беседы, что открывает возможности для более интуитивного и эффективного взаимодействия. Такой подход позволяет машинам не просто выполнять команды, но и понимать намерения пользователя, задавать уточняющие вопросы и предлагать решения, приближая взаимодействие к общению с человеком.
Разумный каркас: от хаоса к согласованному взаимодействию
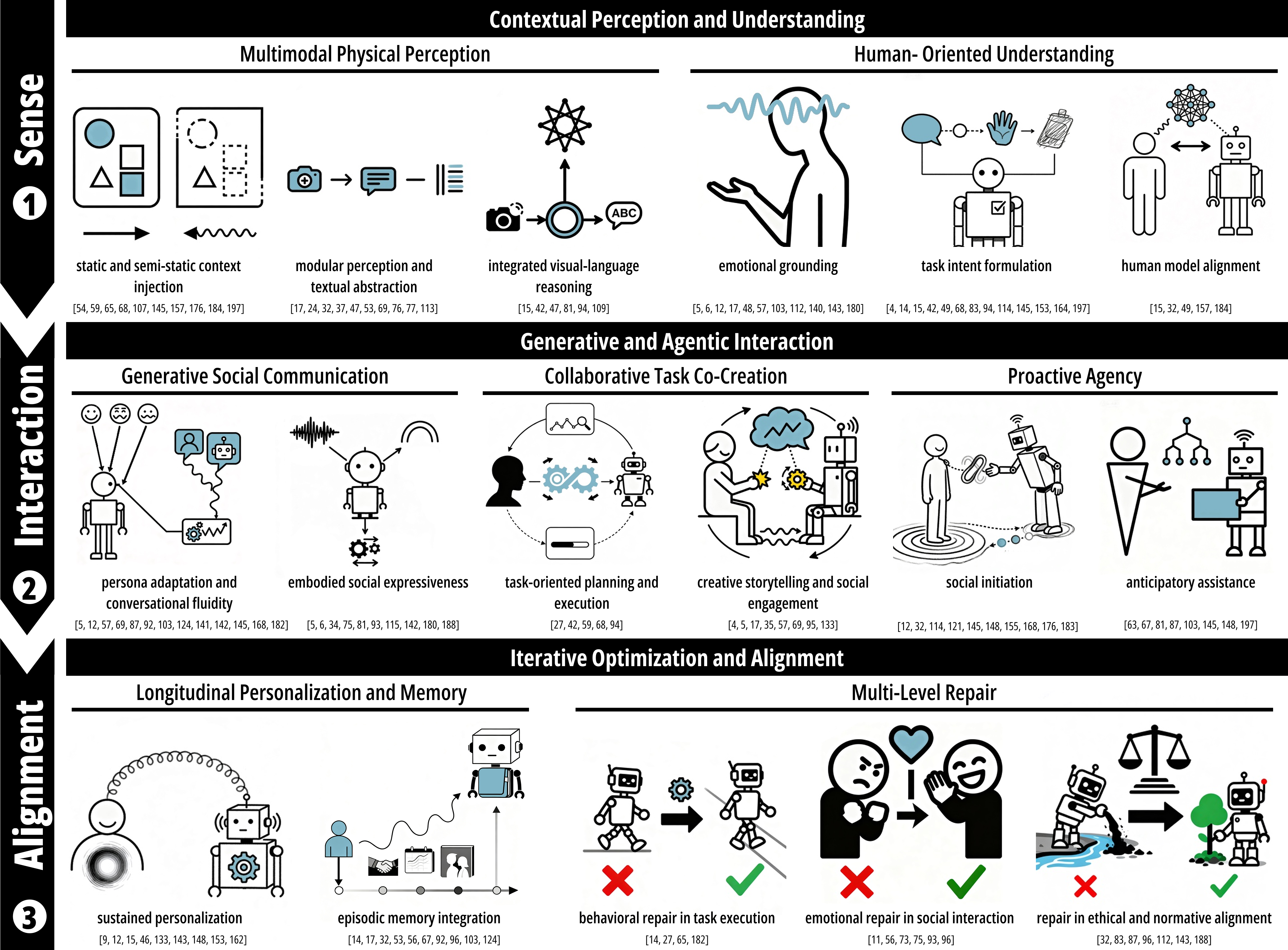
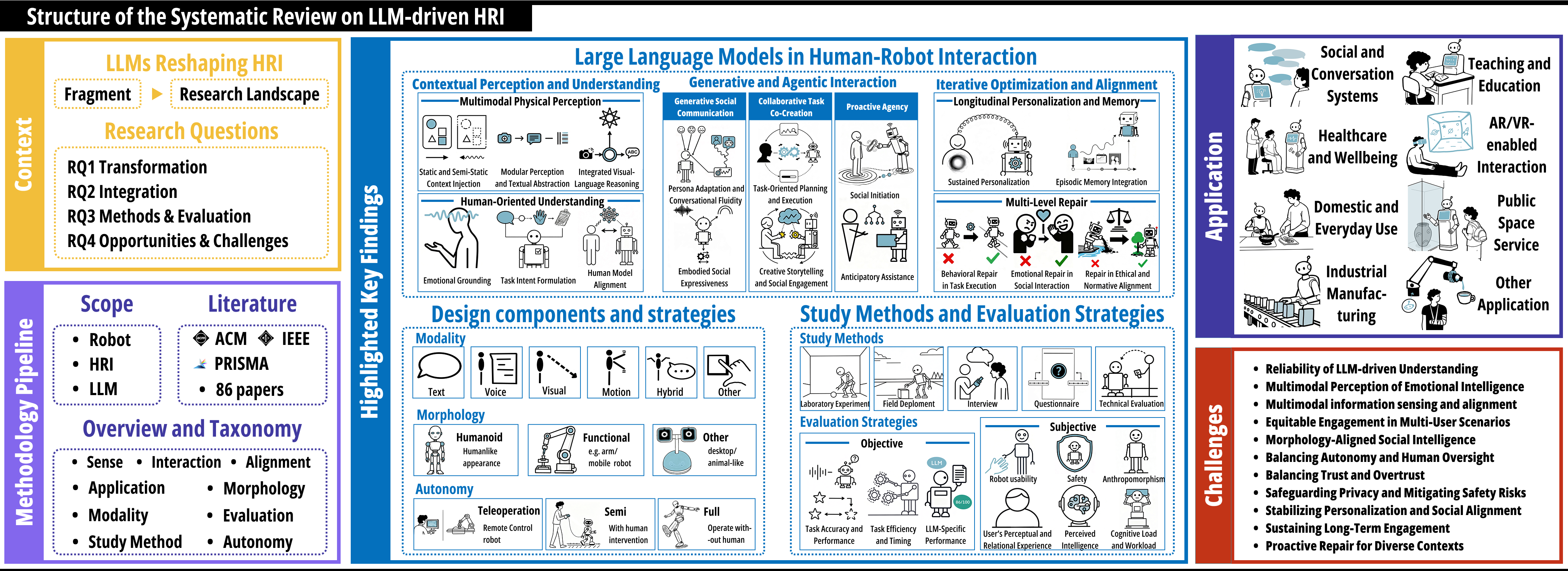
Фреймворк “Восприятие-Взаимодействие-Согласование” (Sense-Interaction-Alignment) представляет собой структурированный подход к интеграции больших языковых моделей (LLM) в системы взаимодействия человека и робота (HRI). Этот фреймворк определяет последовательность этапов: сбор данных о среде и пользователе посредством сенсоров (Восприятие), генерация реакций и ответов на основе обработанной информации (Взаимодействие), и обеспечение соответствия действий робота намерениям пользователя и контексту ситуации (Согласование). Использование данного фреймворка позволяет создавать более надежные, адаптивные и интуитивно понятные HRI-системы, упрощая процесс разработки и развертывания LLM в робототехнике.
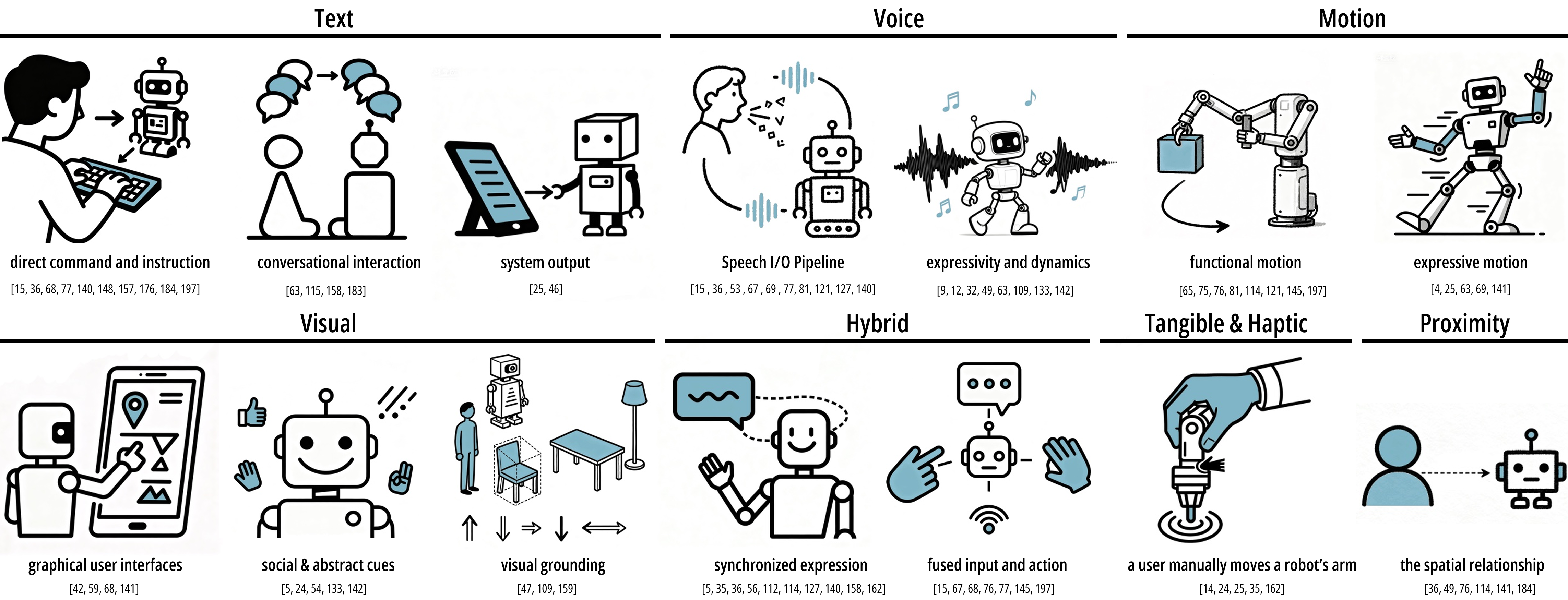
Мультимодальное восприятие позволяет роботам собирать богатый комплекс сенсорных данных, включающий визуальную информацию, аудиосигналы и лингвистические данные. Этот объединенный поток данных служит основой для формирования контекста, предоставляемого большим языковым моделям (LLM). В отличие от систем, полагающихся на единый тип входных данных, мультимодальный подход значительно расширяет возможности LLM по интерпретации ситуации и генерации релевантных ответов, поскольку LLM получает не только текстовые инструкции, но и информацию об окружающей среде, полученную непосредственно от сенсоров робота. Интеграция различных модальностей данных повышает точность и надежность работы робота в сложных и динамичных условиях.
Генеративное взаимодействие позволяет роботам формировать ответы на естественном языке, что обеспечивает более плавное и динамичное общение по сравнению с использованием заранее заданных скриптов. Вместо воспроизведения предопределенных фраз, робот способен генерировать уникальные и контекстуально релевантные реплики, адаптируясь к ходу беседы и запросам пользователя. Это достигается за счет интеграции больших языковых моделей (LLM), которые анализируют входные данные и синтезируют ответы, имитирующие человеческую речь. Такой подход позволяет создавать более реалистичные и эффективные взаимодействия, повышая удобство и интуитивность работы с роботом.
Реальные применения: от индивидуальной помощи к расширению возможностей
Адаптивное планирование задач позволяет роботам динамически корректировать свои планы в соответствии с потребностями пользователя и изменениями в окружающей среде. Данная функциональность достигается за счет использования сенсорных данных, алгоритмов машинного обучения и моделей прогнозирования, позволяющих роботу оценивать текущую ситуацию и выбирать оптимальную последовательность действий. Это приводит к повышению эффективности выполнения задач, снижению риска возникновения аварийных ситуаций и увеличению безопасности взаимодействия робота с человеком и окружающей средой. Например, робот, выполняющий уборку, может изменить маршрут в зависимости от обнаруженных препятствий или потребностей пользователя в уборке конкретной зоны.
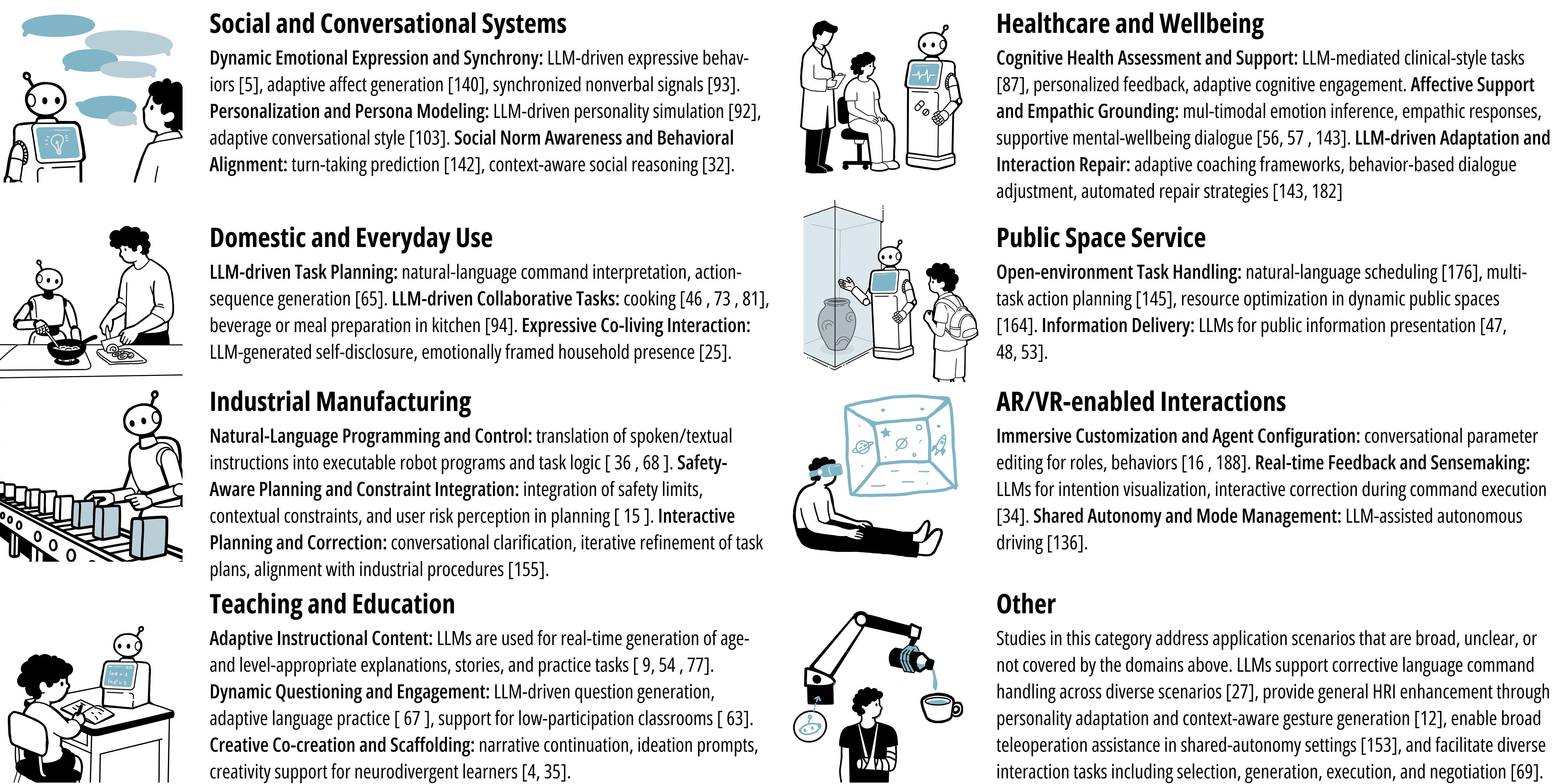
Большие языковые модели (LLM) демонстрируют высокую эффективность в контекстно-зависимом обучении, адаптируя учебный процесс к индивидуальным потребностям каждого учащегося. Основываясь на анализе текущего прогресса, стиля обучения и пробелов в знаниях, LLM способны генерировать персонализированные учебные материалы, предлагать индивидуальные задания и обеспечивать обратную связь в режиме реального времени. Такой подход позволяет оптимизировать темп обучения, фокусироваться на сложных темах и, как показывают исследования, значительно повышает уровень запоминания и усвоения материала по сравнению со стандартными методами обучения. Эффективность LLM в данной области обусловлена их способностью понимать естественный язык, извлекать релевантную информацию и генерировать осмысленные ответы, что делает процесс обучения более интерактивным и продуктивным.
Персонализированный уход с использованием роботов, управляемых большими языковыми моделями (LLM), представляет собой перспективное направление в сфере здравоохранения. Такие системы способны предоставлять не только индивидуально подобранные планы лечения и напоминания о приеме лекарств, но и оказывать эмоциональную поддержку пациентам, особенно в случаях одиночества или депрессии. LLM анализируют данные о пациенте — медицинскую историю, предпочтения, эмоциональное состояние, определяемое по голосу и выражению лица — для адаптации взаимодействия и обеспечения более эффективной и комфортной помощи. Помимо поддержки пациентов с хроническими заболеваниями и пожилых людей, данные системы могут использоваться для мониторинга состояния здоровья, выявления ранних признаков ухудшения и своевременного оповещения медицинского персонала.
Оценка и совершенствование: прокладывая путь к осмысленному взаимодействию
Для оценки удобства использования и эффективности систем взаимодействия человека и робота (HRI) широко применяется шкала системной пригодности (System Usability Scale, SUS). Этот стандартизированный метод позволяет количественно оценить восприятие пользователем простоты использования, эффективности и удовлетворенности системой. SUS представляет собой короткий опросник, состоящий из десяти утверждений, по которым респонденты оценивают свое согласие или несогласие по шкале Ликерта. Полученный балл SUS позволяет исследователям сравнивать различные HRI-системы и выявлять области для улучшения, обеспечивая объективную метрику для оценки качества взаимодействия и повышения пользовательского опыта. Использование SUS способствует созданию более интуитивно понятных и эффективных HRI-систем, отвечающих потребностям пользователей.
Метод «Волшебника за занавесом» предоставляет исследователям уникальную возможность предварительного тестирования и усовершенствования систем взаимодействия человека и робота, имитируя продвинутые функциональные возможности робототехники до их фактической реализации. Вместо того чтобы сразу создавать сложного робота, исследователи вручную управляют некоторыми аспектами поведения системы, создавая иллюзию автономности для участников эксперимента. Это позволяет оценить восприятие пользователей, выявить проблемные места в дизайне и интерфейсе, и собрать ценные данные для дальнейшей разработки, не тратя ресурсы на создание неоптимизированного аппаратного обеспечения. Такой подход обеспечивает гибкость и экономичность на ранних стадиях разработки, позволяя оперативно вносить изменения и улучшения на основе обратной связи от пользователей, прежде чем приступать к дорогостоящему и ресурсоемкому процессу полной реализации.
Для обеспечения научной обоснованности и прозрачности анализа исследований в области взаимодействия человека и робота (HRI) применялись принципы PRISMA — общепринятого стандарта для систематических обзоров. В ходе тщательного отбора из общего числа 814 публикаций по HRI и 5498 работ, посвященных большим языковым моделям (LLM) за 2025 год, в окончательный обзор вошли 86 исследований, соответствующих строгим критериям включения. Такой подход позволил выделить наиболее релевантные и качественные работы, обеспечивая надежную основу для синтеза полученных знаний и выявления ключевых тенденций в развитии LLM-управляемого HRI.
К справедливому и адаптивному взаимодействию: предвидеть будущее
Разработка человеко-роботических взаимодействий (HRI) требует особого внимания к справедливому и инклюзивному дизайну. Необходимо учитывать, что различные пользователи, особенно представители уязвимых групп населения, могут иметь разный уровень доступа к технологиям, различный опыт взаимодействия с роботами и различные потребности. Справедливое взаимодействие предполагает не только отсутствие предвзятости в алгоритмах и интерфейсах, но и активное проектирование систем, которые учитывают культурные особенности, когнитивные способности и физические ограничения пользователей. Игнорирование этих факторов может привести к усилению социального неравенства и дискриминации, в то время как продуманный подход к справедливому взаимодействию позволит создать роботов, которые действительно служат всем слоям населения, повышая качество жизни и способствуя социальной интеграции.
Интерфейсы управления роботами на естественном языке открывают новую эру в человеко-роботном взаимодействии, позволяя пользователям отдавать команды и программировать роботов, используя привычные фразы и выражения. Вместо сложных кодов или специализированных знаний, взаимодействие становится интуитивно понятным и доступным для широкой аудитории, включая людей с ограниченными техническими навыками или опытом. Это значительно расширяет возможности применения робототехники, делая её полезной и эффективной для большего числа людей в различных сферах жизни — от помощи по дому и ухода за пожилыми людьми до образовательных целей и профессиональной деятельности. Благодаря такому подходу, роботы перестают быть инструментом для экспертов и становятся доступными помощниками для каждого, демократизируя доступ к преимуществам роботизированной помощи.
В конечном итоге, стремлением к созданию действительно полезных роботов является их способность к долгосрочной адаптации. Исследования показывают, что роботы, способные непрерывно обучаться и совершенствовать взаимодействие с пользователем на протяжении длительного времени, становятся не просто инструментами, а полноценными партнерами. Этот процесс включает в себя не только запоминание предпочтений и привычек, но и умение предвидеть потребности, корректировать поведение в зависимости от меняющихся обстоятельств и даже предлагать новые решения, основанные на накопленном опыте. Такая способность к адаптации требует разработки сложных алгоритмов машинного обучения, позволяющих роботам эффективно анализировать данные, извлекать закономерности и строить прогностические модели, обеспечивая тем самым более естественное, интуитивное и продуктивное взаимодействие с человеком.

Исследование взаимодействия человека и робота в эпоху больших языковых моделей выявляет закономерность, знакомую из истории технологий: новые инструменты лишь усложняют старые проблемы. Подобно тому, как алхимики стремились к философскому камню, современные исследователи пытаются создать совершенного робота-компаньона. Однако, как справедливо заметил Пол Эрдёш: «Математика — это искусство невидимого». Точно так же и взаимодействие человека с роботом — это не просто набор алгоритмов, а сложное плетение ожиданий, интерпретаций и, неизбежно, разочарований. Эта систематическая проверка подчеркивает, что развитие LLM-управляемых систем — это не столько создание интеллекта, сколько построение иллюзии его наличия, и архитектура такой системы обречена на компромиссы, застывшие во времени.
Куда же это всё ведёт?
Представленный анализ взаимодействия человека и робота в эпоху больших языковых моделей обнажает не столько прогресс, сколько экспоненциальный рост неопределенности. Каждая новая архитектура, каждое добавление “интеллекта” — это, по сути, пророчество о будущей поломке, тщательно замаскированное под инновацию. Мы наблюдаем не создание систем, а взращивание экосистем, чьи непредсказуемые взаимодействия сложно поддаются контролю. Идея “понимающего” робота оказывается призрачной, заменяясь иллюзией эмпатии, созданной статистическими моделями.
Ключевой вопрос, который остаётся без ответа, — это не “как научить робота говорить”, а “зачем?”. Каждое развертывание — маленький апокалипсис, открывающий новые векторы для ошибок и непредвиденных последствий. Исследования сосредоточены на симптомах, игнорируя глубинные причины — нашу потребность в создании искусственных двойников, наделенных иллюзорным разумом.
И, конечно, документация… Кто пишет пророчества после их исполнения? Этот анализ — лишь моментальный снимок ускользающей реальности, напоминание о том, что наиболее сложные системы всегда оказываются более хрупкими, чем мы предполагаем. Будущее взаимодействия человека и робота предсказуемо лишь в своей непредсказуемости.
Оригинал статьи: https://arxiv.org/pdf/2602.15063.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в июне 2026.
- Oppo K14 Turbo Pro ОБЗОР: скоростная зарядка, большой аккумулятор, объёмный накопитель
- Неважно, на что вы фотографируете!
- Что купить фотографу. Рекомендации
- Российский рынок в штопоре: дефицит бюджета, геополитика и падение индекса Мосбиржи (06.06.2026 01:32)
- Российский рынок: консолидация, рубль и секторные тренды – анализ ключевых событий недели (04.06.2026 11:32)
- Realme 16T ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, высокая автономность
- Xiaomi Redmi R70m ОБЗОР: большой аккумулятор, плавный интерфейс
- Motorola Moto G47 ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, большой аккумулятор
- Обзор OnePlus Nord Buds 3 Pro
2026-02-18 07:37