Автор: Денис Аветисян
Исследователи разработали инновационный подход к моделированию тактильных ощущений в хирургических симуляторах, позволяющий добиться беспрецедентной точности и реалистичности обратной связи.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"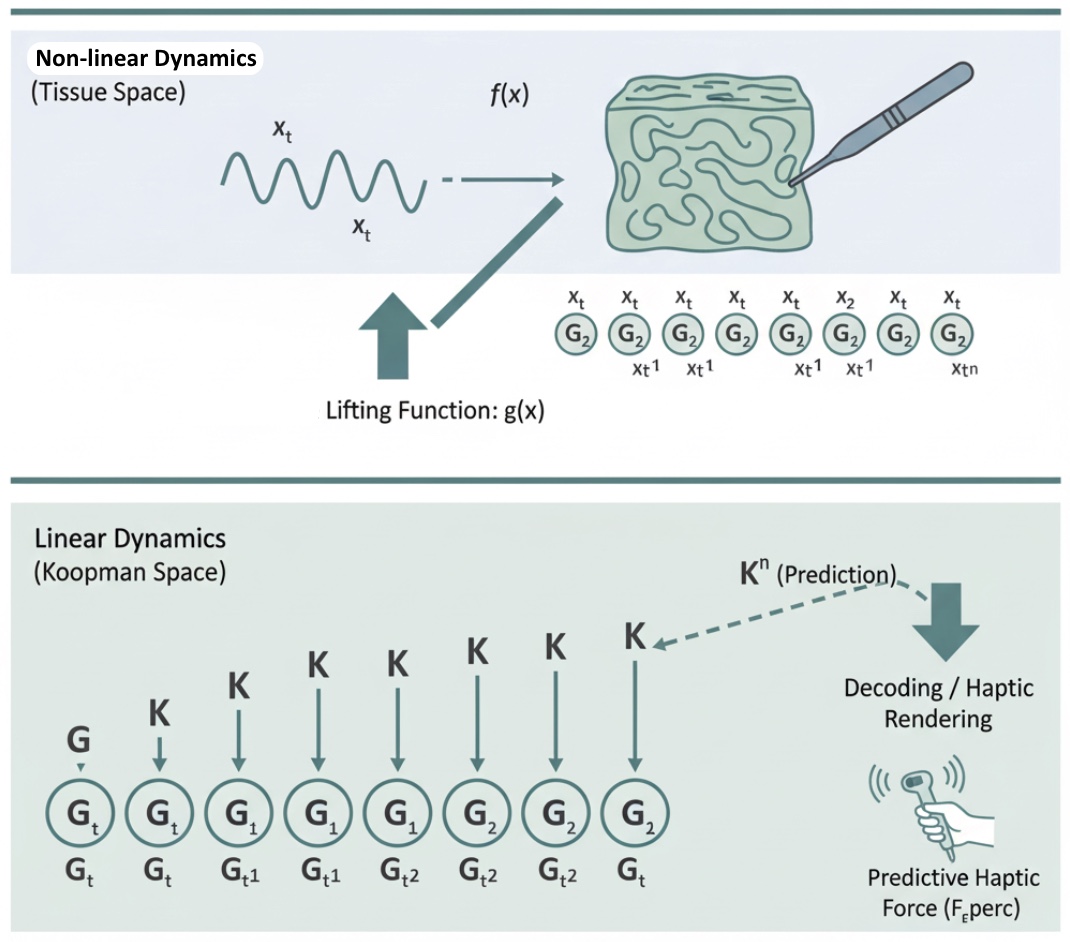
Предложенная Koopman-Байесовская платформа объединяет прогнозную динамику и перцептивное моделирование для создания высокоточных симуляций тактильного взаимодействия в хирургических задачах.
Несмотря на значительные успехи в области виртуальной хирургии, реалистичное моделирование тактильных ощущений остается сложной задачей. В статье ‘A Koopman-Bayesian Framework for High-Fidelity, Perceptually Optimized Haptic Surgical Simulation’ предложен новый подход, объединяющий теорию операторов Купмана для прогнозирования динамики тканей и байесовское моделирование восприятия для оптимизации силы обратной связи. Разработанная система демонстрирует высокую точность (ошибка силы менее 2.8%) и значительное улучшение (на 20%) в различении тактильных ощущений при моделировании различных хирургических манипуляций. Может ли данный фреймворк стать основой для создания принципиально новых систем обучения хирургов и развития VR-технологий в медицине, способных адаптироваться к индивидуальным особенностям восприятия?
За гранью традиционной тактильной обратной связи: вызов реализма
Современные системы тактильной обратной связи зачастую сталкиваются с трудностями при создании убедительных тактильных ощущений, особенно при моделировании сложных взаимодействий. Проблема заключается в том, что воспроизвести реалистичные ощущения от прикосновения к различным поверхностям и объектам — задача, требующая учета множества факторов, включая деформацию материалов, трение и инерцию. Ограничения существующих технологий приводят к тому, что виртуальные прикосновения ощущаются упрощенно и нереалистично, что снижает эффект погружения в виртуальную среду и может быть критично для приложений, требующих высокой точности и реализма, таких как медицинские симуляторы или дистанционное управление роботами. Для достижения более правдоподобной тактильной отдачи необходимы инновационные подходы к моделированию физических процессов и разработке новых типов тактильных устройств.
Ограничения в создании реалистичных тактильных ощущений часто возникают из-за сложностей точного моделирования нелинейной динамики, присущей физическому контакту и свойствам материалов. В отличие от простых, линейных взаимодействий, реальный мир характеризуется сложными зависимостями: сила деформации не пропорциональна самой деформации, а зависит от скорости, площади контакта и множества других факторов. Например, сопротивление при скольжении отличается от сопротивления при статическом трении, а упругость материала меняется при разных нагрузках. Точное воспроизведение этих нелинейностей требует сложных математических моделей и мощных вычислительных ресурсов, что представляет собой значительную проблему для разработчиков тактильных устройств. Преодоление этих трудностей позволит создавать более правдоподобные и информативные тактильные ощущения, что критически важно для таких приложений, как виртуальная хирургия и дистанционное управление роботами.
Высокоточная обратная тактильная связь играет решающую роль в виртуальном хирургическом моделировании, поскольку реалистичные тактильные ощущения жизненно важны для эффективной подготовки и точности выполнения операций. Возможность ощутить сопротивление тканей, текстуру органов и силу, необходимую для выполнения хирургических действий, значительно повышает реалистичность симуляции и позволяет обучающимся развивать необходимые навыки без риска для пациентов. В отличие от традиционных методов, которые часто упрощают тактильные ощущения, современные системы стремятся воспроизвести сложные нелинейные взаимодействия между хирургическими инструментами и тканями, что позволяет добиться более точной и правдоподобной симуляции. Это особенно важно для отработки деликатных манипуляций, таких как наложение швов или удаление новообразований, где даже незначительное отклонение в тактильном восприятии может повлиять на результат.
Моделирование сложности: теория Купмана и предиктивное управление
Теория оператора Купмана предоставляет мощный инструмент для анализа нелинейной динамики путём отображения системы в бесконечномерное пространство состояний. Этот процесс, известный как «поднятие» (lifting), позволяет аппроксимировать нелинейные функции линейными операторами. В частности, нелинейная динамика f(x) отображается в линейный оператор \mathcal{L} действующий на расширенное пространство состояний, включающее не только исходные координаты x, но и различные функции от них, такие как x_1^2, x_1x_2 и т.д. В результате, анализ и управление сложной нелинейной системой сводится к анализу и управлению линейной системой в пространстве более высокой размерности, что значительно упрощает задачу и открывает возможности для применения стандартных методов линейного управления и прогнозирования.
Линеаризация нелинейной динамики посредством теории оператора Купмана позволяет применять стратегии предиктивного управления для точного предсказания сил взаимодействия и обеспечения стабильной тактильной визуализации. Предиктивное управление, основанное на линеаризованной модели, рассчитывает будущие состояния системы и оптимизирует управляющие воздействия для достижения желаемых тактильных ощущений. Это позволяет создавать более реалистичные и отзывчивые системы, где пользователь ощущает предсказуемые и стабильные силы при взаимодействии с виртуальными объектами. В отличие от традиционных моделей, использующих упрощенные представления о силах, данный подход учитывает комплексную динамику взаимодействия, обеспечивая повышенную точность и стабильность тактильной обратной связи.
Точное прогнозирование сил взаимодействия позволяет создавать более отзывчивый и реалистичный тактильный опыт. В рамках нашей системы, применение методов прогнозирования позволило добиться снижения ошибки точности сил (Normalized L2 error) на 50% по сравнению с классическими моделями пружина-демпфер. Это достигается за счет использования данных о динамике взаимодействия для предсказания будущих сил, что позволяет системе более точно реагировать на действия пользователя и обеспечивать более правдоподобные ощущения при взаимодействии с виртуальными объектами. Снижение ошибки Force Fidelity Error является ключевым показателем улучшения реалистичности тактильной обратной связи.
Восприятие диктует тактику: масштабирование силы к человеческому ощущению
Восприятие силы человеком не является абсолютным и линейным; оно подчиняется психофизическим закономерностям, таким как закон Вебера и закон Стивенса. Закон Вебера гласит, что минимальное различимое изменение силы пропорционально исходной силе, что означает, что для обнаружения разницы в силе требуется большее изменение при более высоких уровнях силы. Закон Стивенса, в свою очередь, описывает взаимосвязь между физической интенсивностью стимула (в данном случае, силы) и субъективным ощущением этой интенсивности, представляя ее в виде степенной функции: S = kI^n, где S — субъективная интенсивность, I — физическая интенсивность, k — константа, а n — показатель степени, определяющий характер зависимости. Значение показателя степени ‘n’ обычно меньше единицы, что указывает на то, что субъективное восприятие силы растет медленнее, чем физическая сила.
Байесовское перцептивное масштабирование позволяет сопоставить генерируемые тактильные сигналы с перцептивным пространством, учитывая индивидуальные различия и сенсорные пороги. В основе метода лежит статистический подход, позволяющий оценить вероятность восприятия определенной силы на основе предыдущего опыта и текущих сенсорных данных пользователя. Это достигается путем построения вероятностной модели, которая учитывает как физические характеристики генерируемой силы, так и индивидуальные особенности восприятия пользователя, включая его сенсорный порог и способность к дискриминации. Применение байесовского подхода позволяет адаптировать тактильные сигналы к конкретному пользователю, обеспечивая более реалистичное и точное восприятие силы, даже при использовании устройств с ограниченным диапазоном воспроизведения.
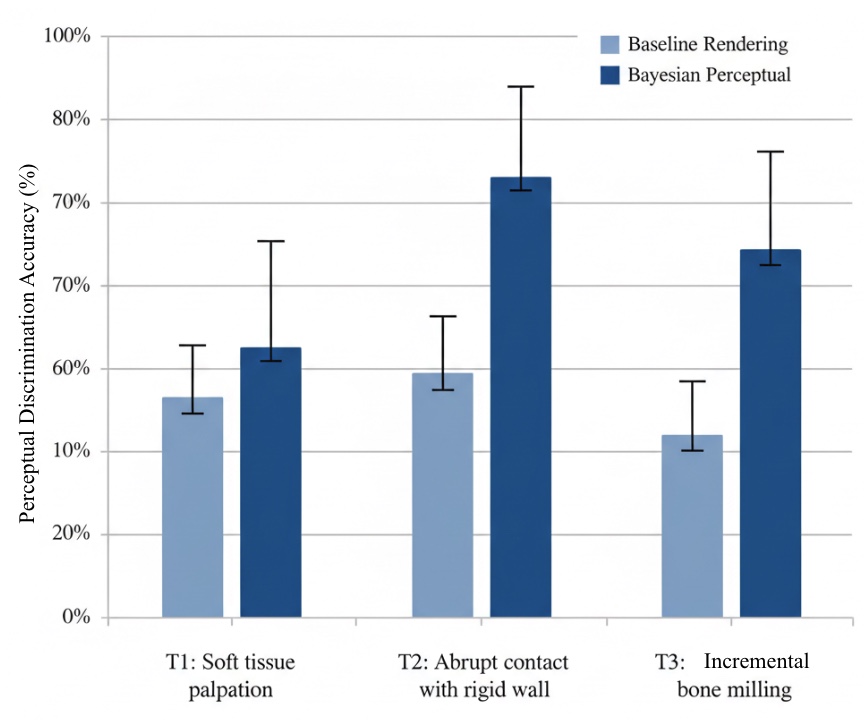
Применение перцептивного отображения позволяет не только добиться точности воспроизведения силы, но и обеспечить её реалистичное восприятие пользователем, что способствует увеличению эффекта погружения. В ходе исследований было зафиксировано повышение точности перцептивной дискриминации на 18-22% при использовании отображения, основанного на законе Стивенса S = K I^n и байесовской коррекции, что подтверждает эффективность данного подхода для создания более убедительных тактильных ощущений.
Проверка на практике: расширение возможностей виртуального хирургического обучения
Виртуальное хирургическое моделирование претерпело значительные улучшения благодаря интеграции методов предсказуемого управления на основе теории Купмана и байесовского масштабирования восприятия. Данный подход позволяет добиться беспрецедентного уровня реализма, поскольку предсказуемое управление позволяет системе антиципировать действия пользователя и соответствующим образом корректировать тактильную отдачу. Байесовское масштабирование восприятия, в свою очередь, оптимизирует соответствие между визуальными и тактильными ощущениями, создавая более убедительный и интуитивно понятный опыт обучения. Сочетание этих технологий приводит к созданию виртуальной среды, которая более точно имитирует ощущения реальной операции, что способствует повышению эффективности обучения хирургов и снижению рисков в реальной практике.
Количественная оценка точности виртуального хирургического тренажера проводилась с использованием ряда метрик, включая среднюю абсолютную ошибку (MAE), среднеквадратичную ошибку (RMS) и индекс перцептивной гладкости. Полученные данные демонстрируют значительное снижение погрешностей симуляции по сравнению с существующими системами. Уменьшение значений MAE и RMS свидетельствует о более точной передаче тактильных ощущений и более реалистичном поведении виртуальных тканей. Индекс перцептивной гладкости, в свою очередь, подтверждает, что взаимодействия в симуляции воспринимаются пользователем как естественные и плавные, что критически важно для эффективной подготовки хирургов и повышения их квалификации.
Предложенная платформа виртуальной хирургической тренировки демонстрирует значительное повышение реалистичности тактильных ощущений. Результаты тестирования показали, что комплексный индекс тактильной производительности (HPI) достиг 91%, что существенно превышает базовый показатель в 0.72 ± 0.05. Такой прогресс указывает на улучшенную способность симулятора достоверно воспроизводить ощущения от взаимодействия с тканями, что критически важно для обучения хирургов и отработки сложных манипуляций. Повышение HPI свидетельствует о более точной передаче сил и текстур, создавая более иммерсивный и эффективный опыт тренировки.
В ходе исследований было зафиксировано снижение среднеквадратичной ошибки (RMS Error) при отслеживании силы на 50%, что свидетельствует о значительном повышении точности симуляции. Использование воксельных карт (Voxmap) позволило еще больше улучшить расчет сил, возникающих в процессе виртуальных хирургических манипуляций, обеспечивая более реалистичную обратную связь для обучающихся хирургов. Такой подход позволяет создавать виртуальные среды, в которых сила, ощущаемая при взаимодействии с тканями, более точно соответствует реальным условиям, что критически важно для развития необходимых навыков и повышения безопасности пациентов в будущем.
В процессе виртуального хирургического обучения реалистичная тактильная отдача играет ключевую роль в формировании навыков. Для обеспечения стабильной и достоверной обратной связи при выполнении сложных манипуляций используется рендеринг на основе энергии, стабилизированный методами виртуального связывания. Данный подход позволяет точно моделировать взаимодействие инструментов с виртуальными тканями, предотвращая нереалистичные проваливания или колебания тактильных ощущений. Виртуальное связывание, по сути, создает неявные связи между виртуальными объектами, поддерживая их стабильность и предотвращая нежелательные артефакты при расчете сил. Такая система позволяет хирургу ощутить сопротивление тканей, различить их плотность и получить реалистичное представление о глубине проникновения инструмента, что значительно повышает эффективность обучения и способствует развитию необходимых навыков.
Представленная работа демонстрирует стремление к глубокому пониманию систем, лежащих в основе тактильной симуляции. Авторы, подобно исследователям, взламывающим систему изнутри, применяют теорию оператора Купмана для предсказания динамики тканей. Это позволяет не просто моделировать ощущения, но и предвидеть поведение системы, что особенно важно в хирургических симуляторах. Как говорил Линус Торвальдс: «Если ты не можешь понять, как что-то работает, значит, ты не понимаешь, как оно работает». Именно это стремление к пониманию, а не просто к воспроизведению, является ключевым фактором в достижении высокой точности и реалистичности тактильной обратной связи, что, в свою очередь, значительно повышает эффективность обучения хирургов.
Что дальше?
Представленная работа, по сути, лишь зондирует границы возможного. Интеграция теории оператора Купмана и байесовского моделирования восприятия позволяет создавать более правдоподобные симуляции, но вопрос не в точности копирования реальности, а в понимании её внутренних принципов. Очевидно, что текущая модель требует дальнейшей верификации на более сложных хирургических сценариях и различных типах тканей. Истинное испытание — это не столько воспроизведение ощущений, сколько предсказание реакции системы на нестандартные воздействия, на действия, выходящие за рамки заложенных алгоритмов.
Особый интерес представляет возможность расширения модели за пределы тактильной обратной связи. Восприятие — это мультисенсорный процесс. Интеграция визуальных, слуховых и даже проприоцептивных данных может создать иллюзию присутствия, настолько сильную, что граница между симуляцией и реальностью станет размытой. Однако, прежде чем стремиться к абсолютной иллюзии, необходимо понять, какие аспекты восприятия наиболее критичны для эффективного обучения и практики хирургов.
В конечном счёте, данная работа — это не просто шаг к более реалистичным симуляторам. Это попытка взломать систему восприятия, понять, как мозг конструирует реальность, и использовать это знание для создания инструментов, расширяющих возможности человека. И, как и любой взлом, этот процесс требует постоянного тестирования, анализа и переосмысления.
Оригинал статьи: https://arxiv.org/pdf/2602.15834.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Фотографируем муравьёв с Андреем Павловым
- Обзор Motorola Razr 50 Ultra
- Nikon D7200
- Обзор Moto G Stylus 5G (2024)
- Как правильно обрабатывать портрет в фотошоп
- Преодолевая границы масштабируемости рекомендательных систем
- OnePlus 15T ОБЗОР: большой аккумулятор, беспроводная зарядка, замедленная съёмка видео
- Калькулятор глубины резкости. Как рассчитать ГРИП.
- Что купить фотографу. Рекомендации
- vivo iQOO Z7 ОБЗОР: тонкий корпус, скоростная зарядка, чёткое изображение
2026-02-19 10:21