Автор: Денис Аветисян
Новая система позволяет человеку интуитивно управлять гибридным жестко-мягким роботом, используя возможности дополненной реальности и точную калибровку параметров.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"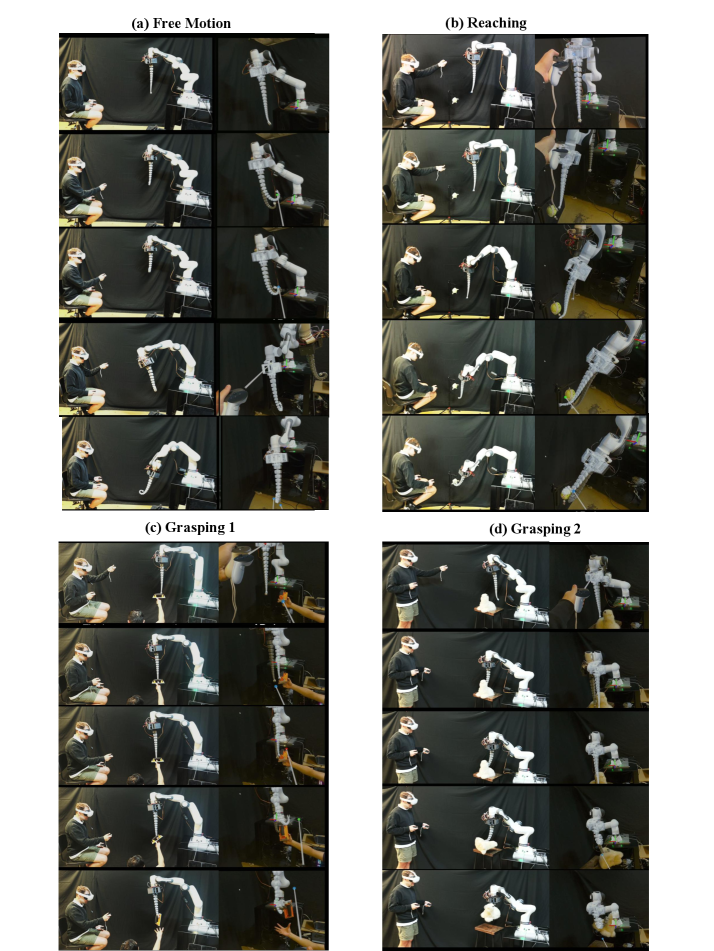
Исследование представляет собой комплексный подход к телеуправлению, основанный на синергии жестких и мягких роботизированных элементов, дополненной реальностью и идентификации параметров с использованием симуляции.
Несмотря на очевидные преимущества гибридных жестко-мягких роботов в адаптации к неструктурированной среде, их эффективное управление и координация остаются сложной задачей. В данной работе, посвященной теме ‘Physical Human-Robot Interaction for Grasping in Augmented Reality via Rigid-Soft Robot Synergy’, предлагается новый подход к телеуправлению такими роботами с использованием дополненной реальности. Разработанная система позволяет оператору взаимодействовать с виртуальной моделью робота, интегрированной в физический движок, что обеспечивает предварительное выполнение операций перед реальным воздействием. Для обеспечения согласованности между виртуальным и физическим мирами предложен метод идентификации параметров, учитывающий геометрические особенности мягких элементов робота, и позволяющий повысить точность моделирования и реалистичность взаимодействия. Какие перспективы открывает данная технология для создания интуитивно понятных и эффективных систем управления сложными роботизированными комплексами?
Вызов мягкой робототехники
Традиционная робототехника, ориентированная на жесткие тела и прецизионное управление, сталкивается с серьезными трудностями при переходе к мягким, континуальным роботам. В отличие от жестких конструкций, где положение и ориентация каждого элемента четко определены, мягкие роботы обладают бесконечным числом степеней свободы, что делает предсказание их поведения и точное управление крайне сложной задачей. Неопределенность, возникающая из-за деформации материалов и сложности моделирования их поведения, требует принципиально новых подходов к управлению, выходящих за рамки традиционных алгоритмов и систем обратной связи. По сути, управление мягким роботом — это не просто задание желаемого положения, а скорее, управление сложной, динамически изменяющейся системой, требующей учета множества факторов и адаптации к непредсказуемым условиям.
Мягкие роботы, обладая беспрецедентной ловкостью и способностью адаптироваться к сложным условиям, сталкиваются с существенными трудностями в обеспечении точного и интуитивно понятного управления. Причина кроется в их бесконечном количестве степеней свободы — в отличие от традиционных роботов с ограниченным числом шарниров, мягкие роботы могут изгибаться и деформироваться практически любым образом. Это делает прогнозирование их движения и разработку эффективных алгоритмов управления крайне сложной задачей, требующей принципиально новых подходов, учитывающих непрерывную природу их деформаций и сложность математического описания их кинематики. Фактически, для управления такими роботами необходимо переосмыслить существующие методы, стремясь к созданию систем, способных учитывать и использовать эту уникальную гибкость, а не бороться с ней.
Для эффективного управления мягкими роботами требуется отход от традиционных методов, ориентированных на жесткие конструкции. Обычные алгоритмы управления, основанные на точной модели динамики и обратной связи по положению, оказываются неэффективными из-за бесконечного числа степеней свободы и высокой податливости мягких систем. Вместо этого, исследователи разрабатывают новые подходы, такие как управление на основе моделирования, адаптивное управление и обучение с подкреплением, которые позволяют роботу «учиться» контролировать свою форму и движение, учитывая его уникальные физические свойства. Особое внимание уделяется разработке сенсоров, способных точно измерять деформацию мягких материалов, и алгоритмов, которые могут интерпретировать эти данные для реализации требуемых действий. Такой переход к адаптивным и обучаемым системам управления является ключевым для раскрытия всего потенциала мягких роботов в различных областях, от медицины до промышленности.
Моделирование и симуляция: мост к управлению
Точное моделирование является критически важным для управления мягкими роботами, однако их сложная деформируемость представляет значительные трудности. Традиционные методы моделирования, требующие вычислений для каждой степени свободы, становятся вычислительно неподъемными. В качестве эффективного подхода используется псевдо-жесткотелая модель (Pseudo-Rigid-Body Model), которая аппроксимирует деформируемую структуру дискретным набором жестких тел, соединенных шарнирами. Это значительно снижает вычислительную сложность, позволяя осуществлять моделирование в реальном времени и эффективно разрабатывать стратегии управления для мягких роботов, сохраняя при этом приемлемую точность представления их поведения.
Высокоточное моделирование, реализуемое с помощью физических движков, таких как MuJoCo, позволяет проводить офлайн-тестирование и оптимизацию стратегий управления мягкими роботами до их развертывания на физическом оборудовании. Это существенно снижает риски, связанные с тестированием непосредственно на роботе, и позволяет быстро итерировать различные алгоритмы управления в виртуальной среде. Использование MuJoCo обеспечивает реалистичную симуляцию динамики мягких роботов, учитывая их деформации и взаимодействия с окружающей средой, что необходимо для разработки эффективных и надежных систем управления. Возможность проведения большого количества испытаний в симуляции позволяет выявить и устранить потенциальные проблемы до их проявления на реальном оборудовании, экономя время и ресурсы.
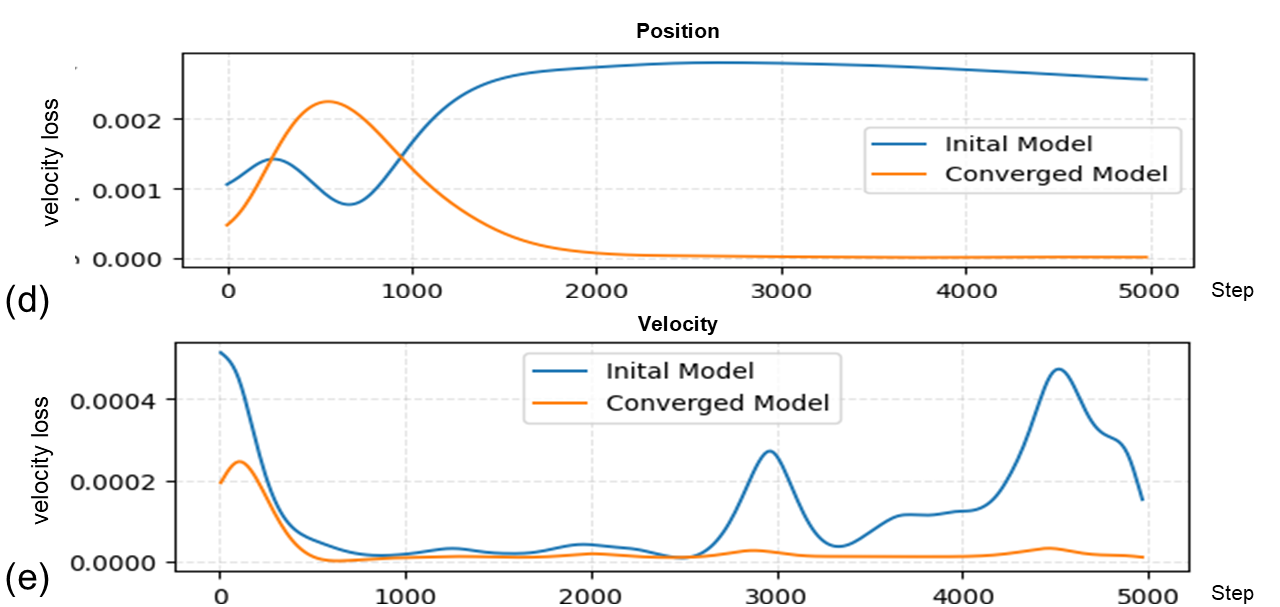
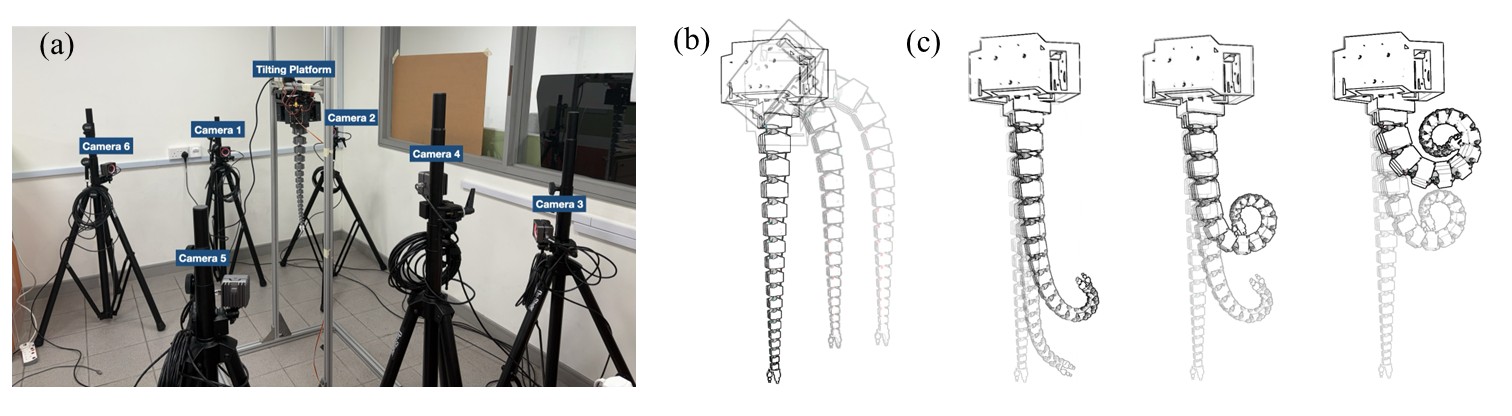
Для обеспечения высокой точности симуляций мягких роботов и успешного переноса стратегий управления с виртуальной среды на физическое устройство, критически важны методы переноса из реального мира в симуляцию (Real-to-Sim Transfer). Эти методы базируются на идентификации параметров модели симуляции, сопоставляя её поведение с данными, полученными из систем захвата движения (Motion Capture Systems). Для оптимизации параметров часто используются алгоритмы, такие как дифференциальная эволюция (Differential Evolution), позволяющие автоматически настраивать параметры симуляции таким образом, чтобы она максимально точно воспроизводила динамику реального робота. Точность идентификации параметров напрямую влияет на эффективность переноса управления и снижает необходимость в повторной настройке на физическом устройстве.
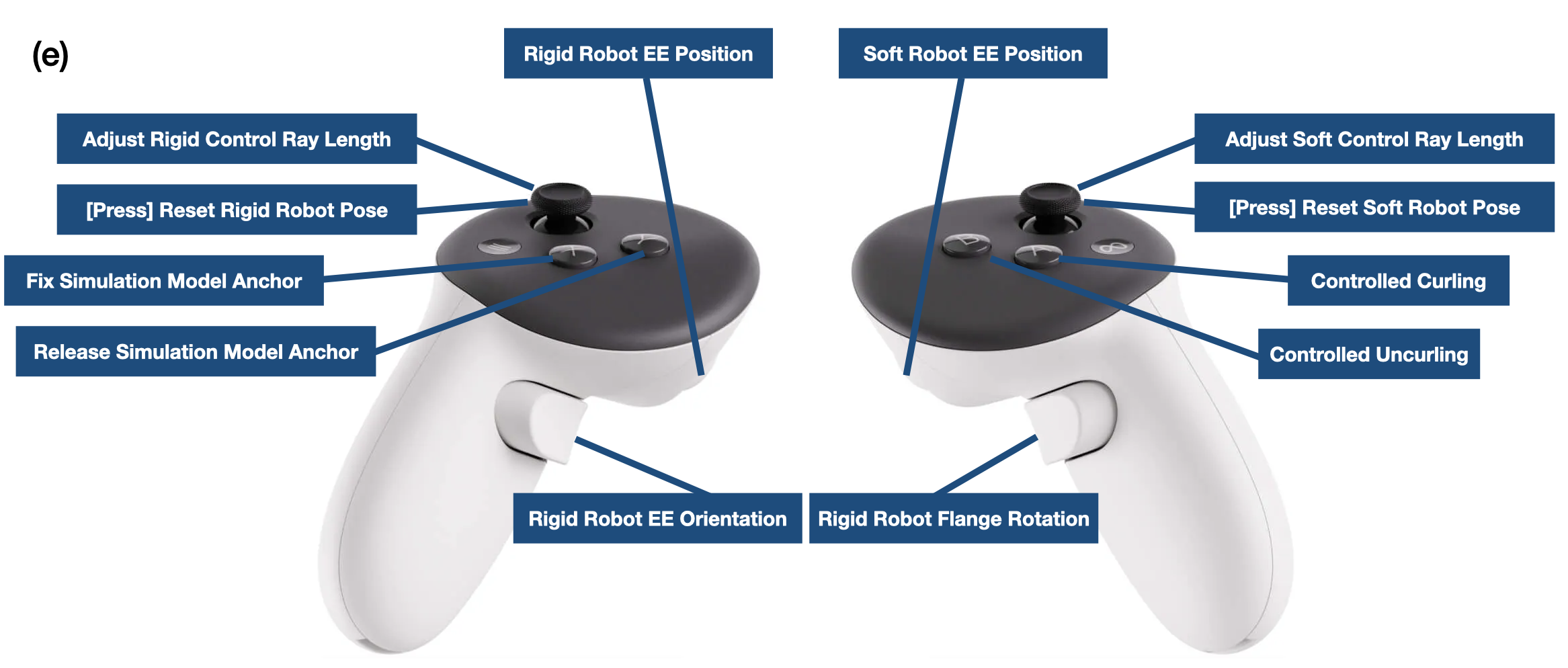
Интуитивное телеуправление и расширенный контроль
Дистанционное управление (телеоперация) обеспечивает непосредственную связь между оператором и роботом, однако управление сложными системами требует методов масштабирования контроля. Архитектура гибридного жестко-мягкого робота (Hybrid Rigid-Soft Robot) выигрывает от этого подхода, поскольку сочетание жестких и мягких элементов позволяет упростить управление, повысить адаптивность и снизить вычислительную нагрузку, необходимую для точного контроля каждого элемента робота. Это особенно важно в задачах, требующих взаимодействия с неструктурированной средой или выполнения деликатных манипуляций, где традиционные методы управления могут оказаться недостаточно эффективными или приводящими к повреждениям.
Использование дополненной реальности (AR) значительно улучшает опыт дистанционного управления роботом, предоставляя оператору визуальную обратную связь в реальном времени и упрощая интерфейс управления. AR-системы накладывают виртуальные элементы, такие как отображение текущего положения робота, планируемые траектории движения и данные сенсоров, непосредственно на изображение реального мира, воспринимаемое оператором. Это позволяет оператору интуитивно понимать состояние робота и более эффективно контролировать его действия, снижая когнитивную нагрузку и повышая точность управления. В результате, AR-интерфейсы позволяют оператору более эффективно взаимодействовать со сложными роботизированными системами, даже в условиях ограниченной видимости или сложной окружающей среды.
Механизм виртуального предпросмотра, использующий дополненную реальность (AR), позволяет оператору визуализировать и корректировать команды в симуляции перед их выполнением на физическом роботе. Данный подход повышает точность управления за счет возможности предварительной оценки траектории и избежания потенциальных столкновений. В процессе телеоперации оператор наблюдает виртуальную модель робота и планируемых действий в реальном времени, что снижает риск ошибок и повреждений, а также сокращает время, необходимое для выполнения задачи. В ходе тестирования системы, использование виртуального предпросмотра способствовало снижению внутренней ошибки формы робота с 8.98 см до 1.58 см за 437 кадров, подтверждая стабильность и эффективность AR-основанного телеуправления.
Продвинутые стратегии управления, такие как управление концевым эффектором и управление формой, значительно расширяют возможности оператора, обеспечивая как точное позиционирование, так и интуитивное манипулирование роботом. В ходе испытаний данная система позволила снизить внутреннюю ошибку формы с 8.98 см до 1.58 см в течение 437 кадров, что демонстрирует стабильность телеоперации на основе дополненной реальности. Такое снижение ошибки подтверждает эффективность предложенного подхода к управлению и обеспечивает более высокую точность и надежность при выполнении сложных задач.
Расширяя горизонты мягкой робототехники
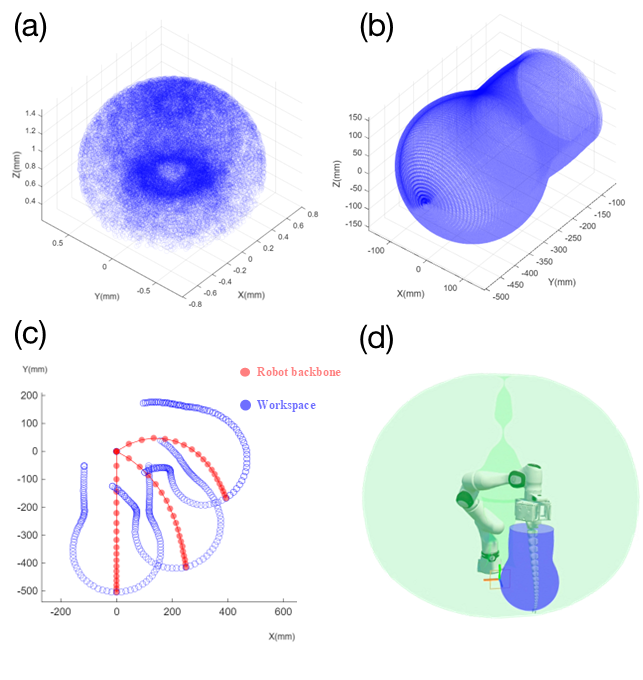
Возможность точного управления мягкими континуальными роботами, в особенности манипуляторами с тросовым приводом, значительно расширяет горизонты их применения. Эти системы демонстрируют потенциал в деликатных областях, таких как малоинвазивная хирургия, где требуется высокая точность и гибкость для доступа к труднодоступным местам. В сфере поисково-спасательных операций, роботы подобного типа способны проникать в завалы и обследовать опасные зоны, минимизируя риски для спасателей. Кроме того, мягкие манипуляторы перспективны для освоения космического пространства, где их гибкость и адаптивность позволяют проводить исследования и ремонтные работы в условиях ограниченного доступа и непредсказуемой среды. Развитие технологий управления такими роботами открывает новые возможности для автоматизации задач в экстремальных и сложных условиях, ранее недоступных для традиционной робототехники.
Системы мягкой робототехники, обеспечивающие операторам интуитивно понятное управление и обратную связь в реальном времени, открывают новые возможности для выполнения сложных задач в ограниченных и непредсказуемых условиях. Такой подход позволяет роботу адаптироваться к изменяющейся обстановке и препятствиям, что критически важно при проведении операций в труднодоступных местах, например, при спасательных операциях или исследовании космического пространства. Предоставление оператору непосредственного ощущения взаимодействия с окружающей средой, через тактильную или визуальную обратную связь, значительно повышает точность и эффективность работы, позволяя манипулировать объектами с высокой степенью деликатности и контроля, даже в условиях ограниченной видимости или отсутствия прямой видимости.
Сочетание точного математического моделирования, высокоточной симуляции и интуитивно понятных интерфейсов формирует надежную и масштабируемую платформу для дальнейшего развития и внедрения технологий мягкой робототехники. Такой комплексный подход позволяет не только предсказывать поведение гибких манипуляторов в различных условиях, но и оптимизировать их конструкцию и алгоритмы управления. Благодаря возможности детального моделирования и тестирования в виртуальной среде, разработчики могут значительно сократить время и затраты на создание прототипов, а также повысить надежность и безопасность роботизированных систем. Интуитивные интерфейсы, в свою очередь, обеспечивают удобство и эффективность взаимодействия человека с роботом, открывая новые возможности для применения мягких роботов в сложных и труднодоступных средах, таких как медицина, освоение космоса и ликвидация последствий чрезвычайных ситуаций.
Понимание карты досягаемости мягких континуальных роботов имеет решающее значение для планирования задач и обеспечения безопасной работы в сложных рабочих пространствах. Исследования показали, что точное определение границ, в пределах которых робот может эффективно функционировать, позволяет оптимизировать траектории движения и избегать столкновений с препятствиями. Ключевым достижением стало значительное снижение внутренней ошибки формирования — на 83.3%, что открывает возможности для более надежной и точной работы в ограниченных и непредсказуемых условиях. Уменьшение этой ошибки обеспечивает стабильность и предсказуемость движений робота, что особенно важно при выполнении деликатных задач, например, в медицинской робототехнике или при исследовании труднодоступных мест.
Исследование, представленное в данной работе, демонстрирует, как симбиоз жестких и мягких робототехнических систем может значительно улучшить взаимодействие человека и робота в условиях дополненной реальности. Особое внимание уделяется точности идентификации параметров, что критически важно для реалистичной симуляции и успешного переноса управления из виртуальной среды в реальную. Как однажды заметил Алан Тьюринг: «Искусственный интеллект — это не замена человеческого разума, а его усиление». В контексте данной работы, это означает, что создаваемая система не стремится заменить навыки человека в манипулировании объектами, а скорее предоставляет инструменты для их расширения и повышения эффективности. Этот подход позволяет создавать более интуитивные и надежные системы взаимодействия, способные адаптироваться к сложным и непредсказуемым условиям.
Куда же дальше?
Представленная работа, исследуя симбиоз жестких и мягких роботов в дополненной реальности, лишь аккуратно приоткрывает дверь в пространство, где взаимодействие человека и машины становится менее инструментом, а больше формой диалога. Точность идентификации параметров, безусловно, важна, но куда более интересным представляется вопрос о том, как система учится адаптироваться к неточностям, к неизбежному разрыву между симуляцией и реальностью. Системы, как и люди, со временем учатся не спешить, и, возможно, главная ценность подобных исследований — не в достижении идеальной симуляции, а в создании платформы для наблюдения за процессом обучения.
Очевидным ограничением остается зависимость от четко определенных моделей поведения. В реальном мире, особенно при работе с деликатными объектами, хаос и непредсказуемость — скорее правило, чем исключение. Вместо того, чтобы пытаться его подавить, возможно, стоит исследовать способы, с помощью которых система может использовать его в своих интересах, научиться «дышать» вместе с энтропией. Иногда наблюдение — единственная форма участия.
Следующим шагом представляется переход от телеоператорского управления к более автономным системам, способным самостоятельно адаптироваться к меняющимся условиям и непредсказуемым взаимодействиям. Однако, прежде чем стремиться к полной автономии, необходимо понять, что потеря контроля над процессом — это не провал, а возможность для появления чего-то нового. Все системы стареют — вопрос лишь в том, делают ли они это достойно.
Оригинал статьи: https://arxiv.org/pdf/2602.17128.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Обзор Motorola Razr 50 Ultra
- Фотографируем муравьёв с Андреем Павловым
- Warhammer 40,000: Space Marine 2 — Список всех врагов и боссов на данный момент
- Преодолевая границы масштабируемости рекомендательных систем
- Nikon D7200
- vivo S50 Pro mini ОБЗОР: чёткое изображение, беспроводная зарядка, скоростная зарядка
- Лучшие ноутбуки с матовым экраном. Что купить в мае 2026.
- vivo iQOO Z7 ОБЗОР: тонкий корпус, скоростная зарядка, чёткое изображение
- Что купить фотографу. Рекомендации
- Tecno Pova 7 ОБЗОР: беспроводная зарядка, плавный интерфейс, большой аккумулятор
2026-02-20 06:31