Автор: Денис Аветисян
Исследователи предлагают инновационный метод, повышающий точность и надежность предсказания оптимальных точек захвата тканей при роботизированных операциях.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"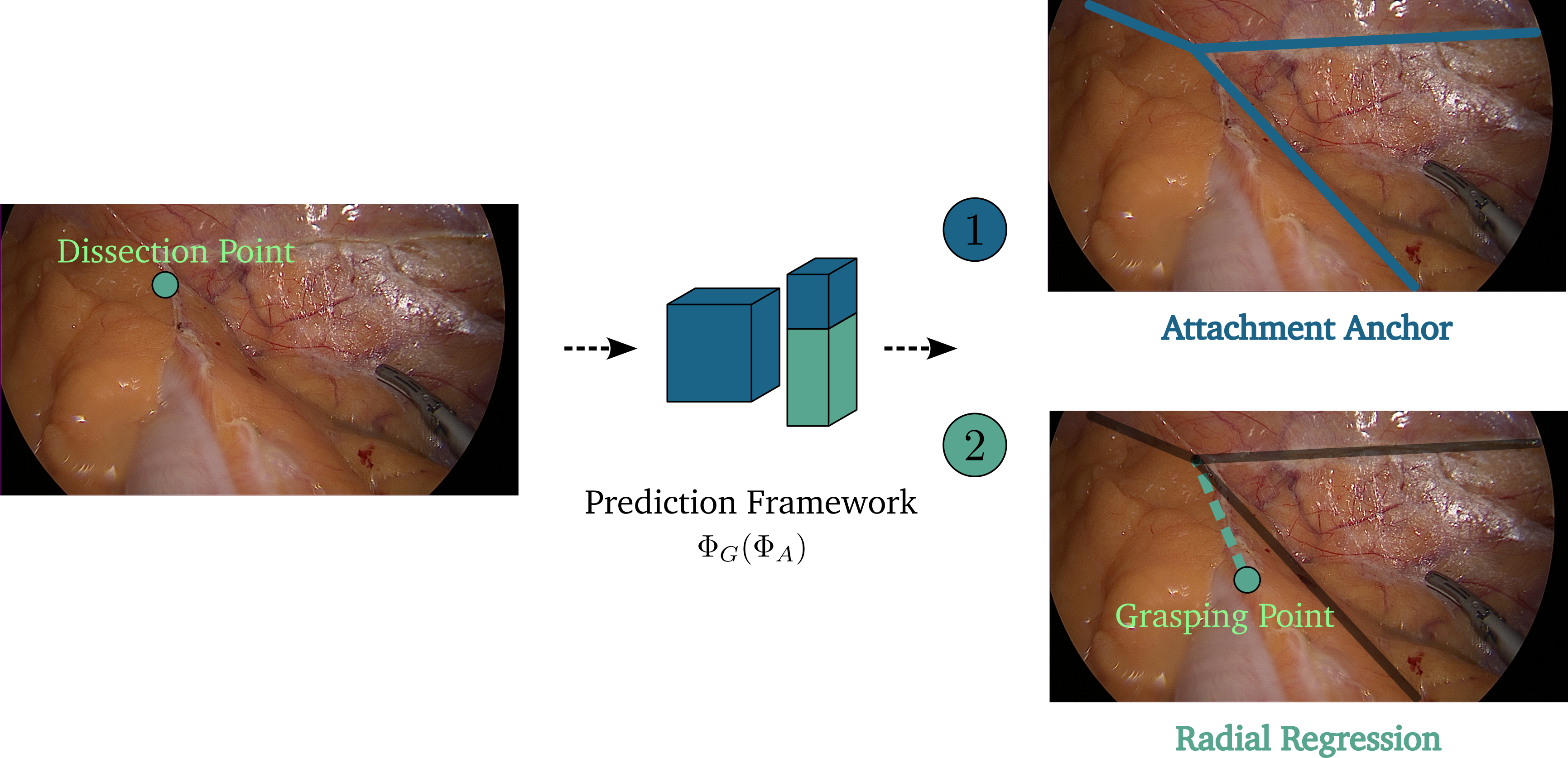
Представленная концепция ‘якорей прикрепления’ улучшает представление хирургической сцены и позволяет более эффективно планировать манипуляции с тканями при колоректальных операциях.
Несмотря на значительный прогресс в области роботизированной хирургии, точное предсказание точек захвата тканей остается сложной задачей, особенно в вариативных процедурах, таких как колоректальная хирургия. В данной работе, представленной в статье ‘Attachment Anchors: A Novel Framework for Laparoscopic Grasping Point Prediction in Colorectal Surgery’, предлагается новый подход, использующий концепцию «якорей прикрепления» — структурированное представление, кодирующее локальную геометрию и механические связи тканей с анатомическими структурами. Показано, что эта репрезентация повышает точность предсказания точек захвата, нормализуя хирургическую сцену относительно согласованной локальной системы координат, и обеспечивает улучшенные результаты, особенно в условиях, отличающихся от обучающих данных. Может ли данное представление стать основой для создания полностью автономных систем манипулирования тканями в сложных хирургических вмешательствах?
Анатомическая Неопределённость: Вызов Точной Хирургии
Колоректальная хирургия, несмотря на свою распространенность, сопряжена со значительными трудностями, обусловленными индивидуальными анатомическими особенностями каждого пациента. Вариабельность строения кишечника, а также такие критически важные этапы, как мобилизация толстой кишки, требуют от хирурга высокой квалификации и точного понимания анатомии. Каждый случай уникален, и стандартные хирургические подходы могут оказаться недостаточно эффективными при выраженных анатомических отклонениях. Непредсказуемость анатомии может существенно усложнить операцию, увеличивая риск осложнений и продолжительность вмешательства, что подчеркивает необходимость разработки более адаптивных и точных хирургических инструментов и методик.
Успешное формирование анастомоза — соединения двух отделов кишки — в колоректальной хирургии напрямую зависит от предельной точности манипуляций с тканями и безошибочной идентификации хирургических ориентиров. Этот этап требует от хирурга высокого уровня мастерства и опыта, поскольку анатомическая изменчивость и индивидуальные особенности пациентов могут существенно влиять на ход операции. Тщательное выделение и сопоставление сосудистых и нервных образований, а также понимание сложной архитектуры брыжейки кишки, критически важны для предотвращения ишемии и последующих осложнений. Хирург, опираясь на свои знания и навыки, должен уметь адаптироваться к различным анатомическим вариантам и обеспечивать надежное и безопасное соединение отделов кишки, что является залогом благоприятного исхода операции.
Современные системы хирургической навигации, несмотря на значительный прогресс, зачастую демонстрируют недостаточную адаптивность к анатомическим вариациям, встречающимся при колоректальных операциях. Это проявляется в неспособности корректно отображать изменения в структуре тканей, возникающие из-за индивидуальных особенностей пациента или непредсказуемых хирургических условий. Как следствие, хирургам приходится тратить дополнительное время на визуальную оценку и ручную корректировку данных навигации, что удлиняет продолжительность операции и повышает риск возникновения осложнений, таких как несостоятельность анастомоза или повреждение соседних органов. Недостаточная надежность существующих систем подчеркивает необходимость разработки более гибких и интеллектуальных инструментов, способных учитывать индивидуальные анатомические особенности и обеспечивать точную навигацию в динамически меняющейся операционной среде.

Якоря Прикрепления: Новый Взгляд на Визуальное Представление
Предлагаемое представление “Якоря Прикрепления” (Attachment Anchors) кодирует механическую, визуальную и семантическую информацию, релевантную для хирургического захвата. Данная визуальная репрезентация объединяет данные о форме, текстуре и расположении тканей, а также информацию о механических свойствах и функциональном назначении анатомических структур. В отличие от анализа только визуальных признаков, “Якоря Прикрепления” предоставляют комплексное описание сцены, необходимое для точного и безопасного манипулирования тканями роботизированными системами во время хирургических операций.
Предлагаемое представление выходит за рамки анализа простых признаков изображения, интегрируя ключевые хирургические элементы, такие как тип ткани, ориентация инструментов и анатомические ориентиры. Это позволяет создать более устойчивый и информативный входной сигнал для роботизированных систем, поскольку учитывается не только визуальная информация, но и контекст хирургической манипуляции. В отличие от методов, основанных исключительно на пиксельных данных, представление обеспечивает более надежное распознавание объектов и их функционального назначения в хирургическом поле, что критически важно для точного и безопасного выполнения роботизированных операций.
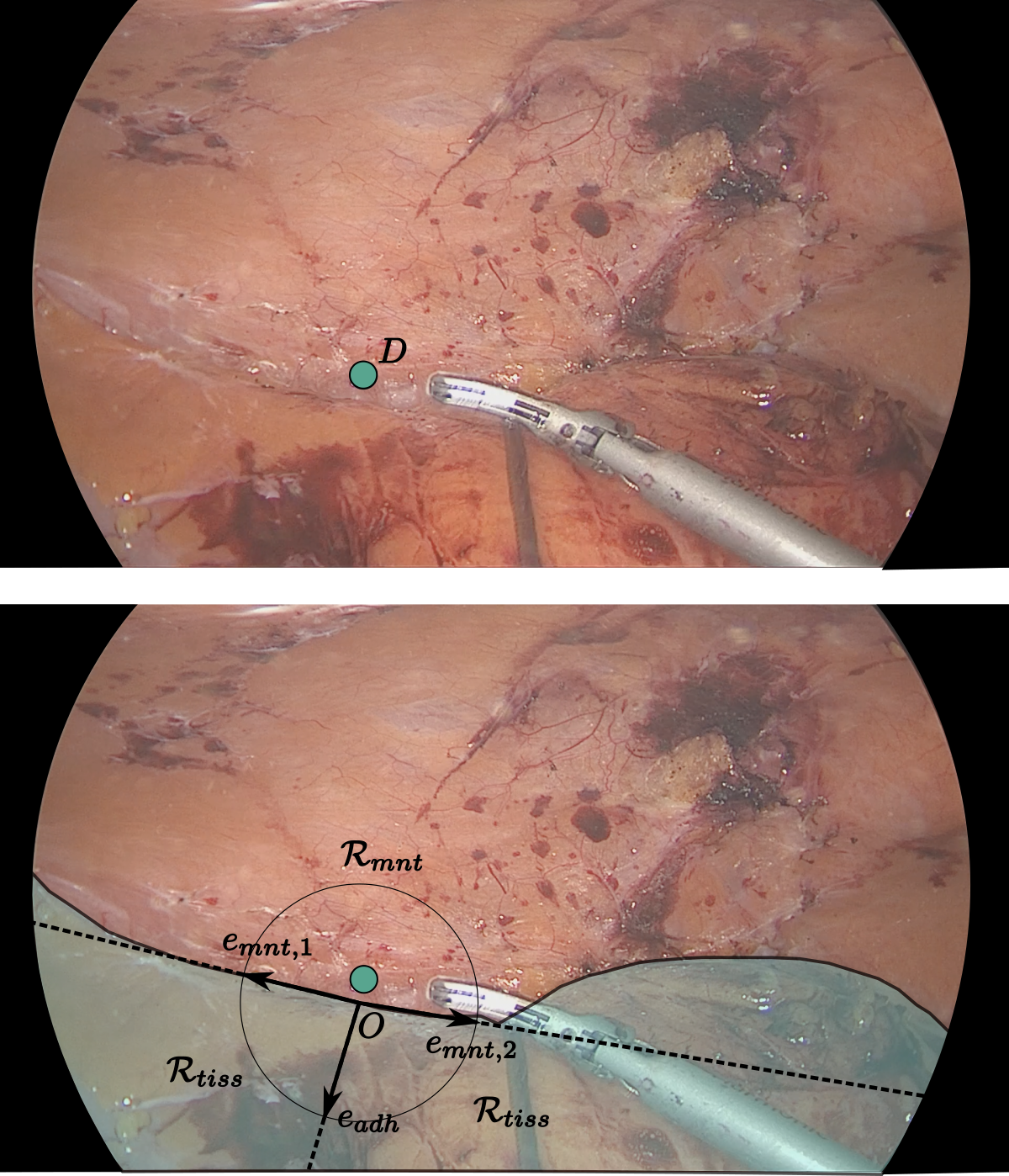
Представление “якорей прикрепления” формируется на основе анализа хирургических изображений и точек диссекции, что позволяет создать контекстуальное понимание хирургической сцены. Процесс обучения включает в себя извлечение признаков из изображений, соответствующих анатомическим структурам и областям манипуляций, а также сопоставление их с точками диссекции, определяющими границы и взаимосвязи тканей. Это позволяет системе не только идентифицировать объекты, но и понимать их пространственное расположение и функциональное значение в контексте выполняемой операции, обеспечивая более надежное и информативное представление для роботизированных систем.
Обучение Надежным Представлениям: Методы и Валидация
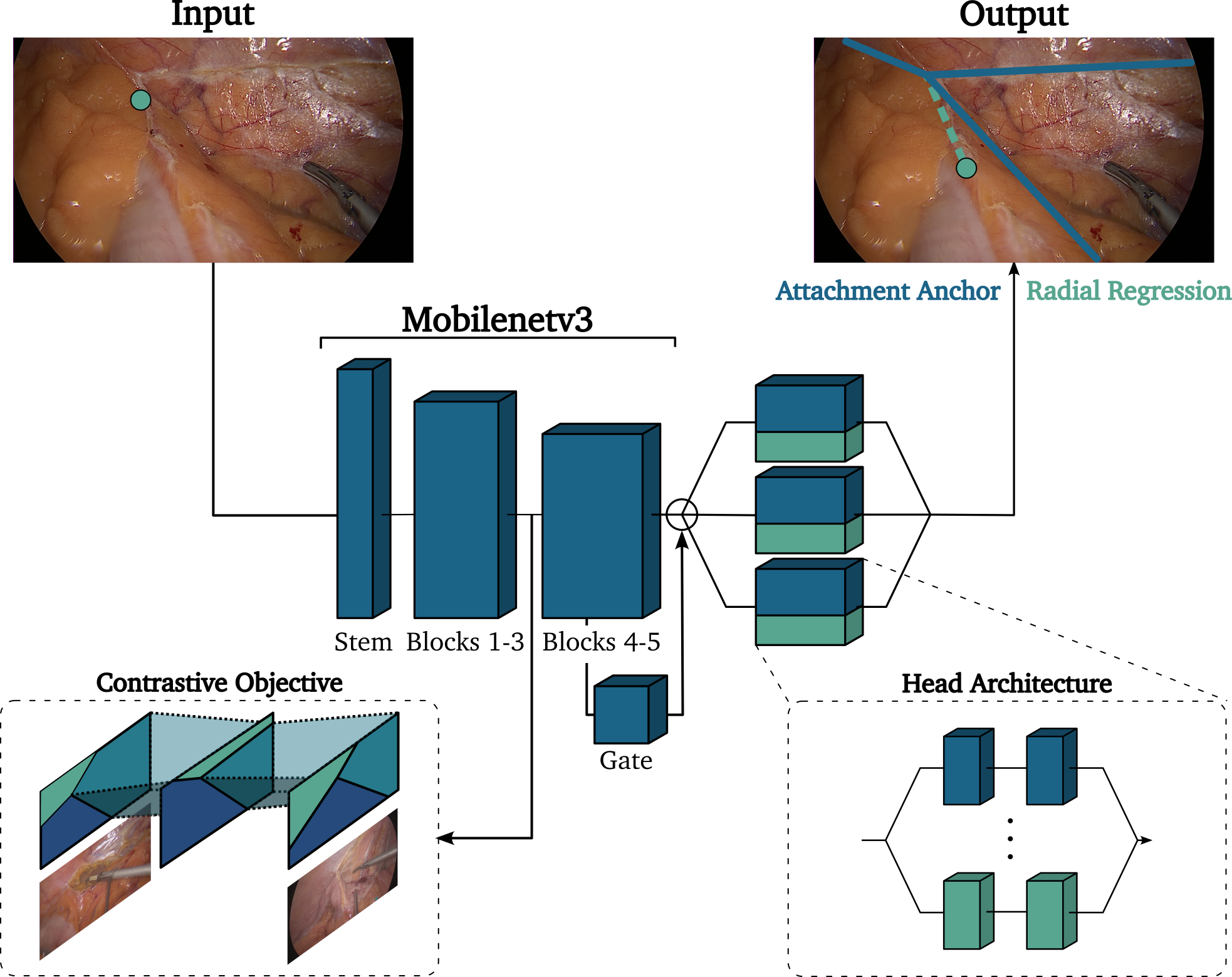
В нашей системе для начального определения точек привязки (attachment anchors) используется архитектура YOLOv8, обеспечивающая высокую скорость и точность обнаружения объектов. Для обучения надежных представлений признаков применяется функция потерь InfoNCE (Noise Contrastive Estimation), которая максимизирует сходство между эмбеддингами признаков, соответствующих одним и тем же точкам привязки, и минимизирует сходство между эмбеддингами разных точек. InfoNCE Loss способствует формированию компактного и дискриминативного пространства признаков, что улучшает обобщающую способность модели и повышает устойчивость к вариациям в данных. Эффективность InfoNCE достигается путем сравнения положительных пар (одинаковые точки привязки) с отрицательными (разные точки), что позволяет модели различать важные признаки и игнорировать шум.
Для повышения устойчивости и обобщающей способности модели применяются методы варьирования тренировочных данных, включающие в себя хирургическое искажение сцен (surgical scene warping) и стандартные техники аугментации данных. Хирургическое искажение сцен предполагает контролируемые деформации изображений, имитирующие изменения в положении инструментов и тканей во время операции. Дополнительно используются стандартные методы аугментации, такие как случайные повороты, масштабирование, изменения яркости и контрастности, а также добавление шума. Комбинация этих подходов позволяет модели обучаться на более разнообразном наборе данных, что улучшает её способность к обобщению и повышает устойчивость к вариациям в реальных хирургических сценариях.
Представление точек привязки, полученное в процессе обучения, используется для предсказания точек захвата посредством декодера, основанного на радиальной регрессии. Этот декодер преобразует векторное представление точки привязки в координаты точки захвата, используя радиальную функцию для определения смещения от центральной точки. Регрессия осуществляется по радиальным компонентам, что позволяет точно определять положение точки захвата относительно точки привязки. Выход декодера представляет собой координаты (x, y) точки захвата, которые используются для планирования траектории захвата объекта.

Точность и Эффективность: Подтверждение Точности Захвата
Декодер точек захвата демонстрирует высокую точность, достигающую 50.14% по метрике Precision@6%, что значительно превосходит показатель в 37.76%, полученный без использования точек привязки. Данный результат указывает на существенное улучшение способности системы определять оптимальные точки для захвата хирургическими инструментами. Повышенная точность, обусловленная интеграцией точек привязки, позволяет более надежно направлять робота-хирурга, минимизируя риск ошибок и повышая эффективность проведения операций. Эффективность предложенного подхода подтверждается количественным улучшением, подчеркивающим важность использования дополнительных ориентиров для точного определения точек захвата.
Исследования показали, что использование так называемых “якорных точек прикрепления” значительно повышает надежность управления роботизированными хирургическими инструментами. Предварительное обучение модели с использованием данных о расположении этих якорных точек привело к улучшению точности на 12.10%. Это свидетельствует о том, что интеграция информации о стабильных точках в операционном поле позволяет более эффективно направлять инструменты, обеспечивая более предсказуемое и контролируемое выполнение хирургических манипуляций. Полученные результаты указывают на перспективность применения данной технологии для повышения безопасности и эффективности роботизированной хирургии.
В ходе анализа неиспользованных ранее операций по правосторонней гемиколэктомии было зафиксировано повышение эффективности на 16.44% при использовании точек привязки. Данный результат демонстрирует способность разработанной системы к обобщению и адаптации к новым хирургическим сценариям, что позволяет значительно повысить точность манипуляций. Применение точек привязки обеспечивает надежную направляющую для роботизированных хирургических инструментов, позволяя им выполнять сложные задачи с большей уверенностью и контролем, даже в незнакомой операционной среде. Это свидетельствует о перспективности подхода для широкого спектра хирургических процедур, требующих высокой степени точности и минимальной инвазивности.
Работа посвящена поиску надежных точек захвата при роботизированных операциях, а именно в колоректальной хирургии. Авторы предлагают концепцию ‘якорей привязки’ — своеобразную карту сцены, позволяющую модели точнее предсказывать оптимальные точки для манипуляции с тканями. Это напоминает попытку уловить ускользающий образ в тумане — чем детальнее карта, тем выше шанс успешного захвата. Как однажды заметил Эндрю Ын: «Искусственный интеллект — это не замена человеческого интеллекта, а его усиление». В данном случае, ‘якоря привязки’ — это как дополнительный набор рук для хирурга, позволяющий ему действовать точнее и увереннее, даже в самых сложных ситуациях. Ведь любая модель, как заклинание, работает до первого столкновения с реальным, непредсказуемым пациентом.
Куда же дальше?
Предложенное представление о «точках привязки» — это, безусловно, ещё один способ уговорить хаос хирургической сцены. Модель предсказывает, куда робот должен схватить ткань, но, как известно, любое предсказание — это лишь способ обмануть будущее, а не увидеть его. Точность, конечно, впечатляет, но стоит помнить: данные не врут, они просто помнят избирательно, и всегда найдется аномалия, способная разрушить самое элегантное заклинание.
Следующим шагом, вероятно, станет попытка обобщения. Текущая работа сосредоточена на конкретной процедуре — колоректальной хирургии. Но хирургический ландшафт огромен и разнообразен. Попытка создать универсальную модель, способную адаптироваться к различным анатомическим особенностям и типам тканей, — это акт веры, требующий огромного количества данных и, вероятно, ещё большего количества упрощений.
Истинный прогресс, возможно, лежит не в улучшении точности предсказаний, а в создании систем, способных учиться в процессе операции. Системы, которые не просто «видят» точки привязки, но и понимают контекст, предвидят возможные осложнения и адаптируются к меняющимся условиям. Метрики, конечно, успокаивают, но подлинное мастерство проявляется в способности к импровизации.
Оригинал статьи: https://arxiv.org/pdf/2602.17310.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок в зоне турбулентности: рубль, ставки и новые риски (10.04.2026 01:32)
- Искусственный интеллект, ориентированный на человека: новый подход
- Proton только что запустил альтернативу Google Workspace и Microsoft 365, ориентированную на конфиденциальность.
- Canon EOS 80D
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
- МосБиржа под давлением: windfall tax и ИИ-стимулы – что ждет инвесторов? (11.04.2026 10:32)
- Microsoft запускает Mixed Reality Link для Windows 11 — подключите свой компьютер к гарнитуре Meta Quest!
- IdeaPad Slim 3 15IRH10R ОБЗОР
- Как использовать режимы съёмки P, S, A, M на фотоаппарате?
- Пермэнергосбыт акции прогноз. Цена PMSB
2026-02-22 03:53