Автор: Денис Аветисян
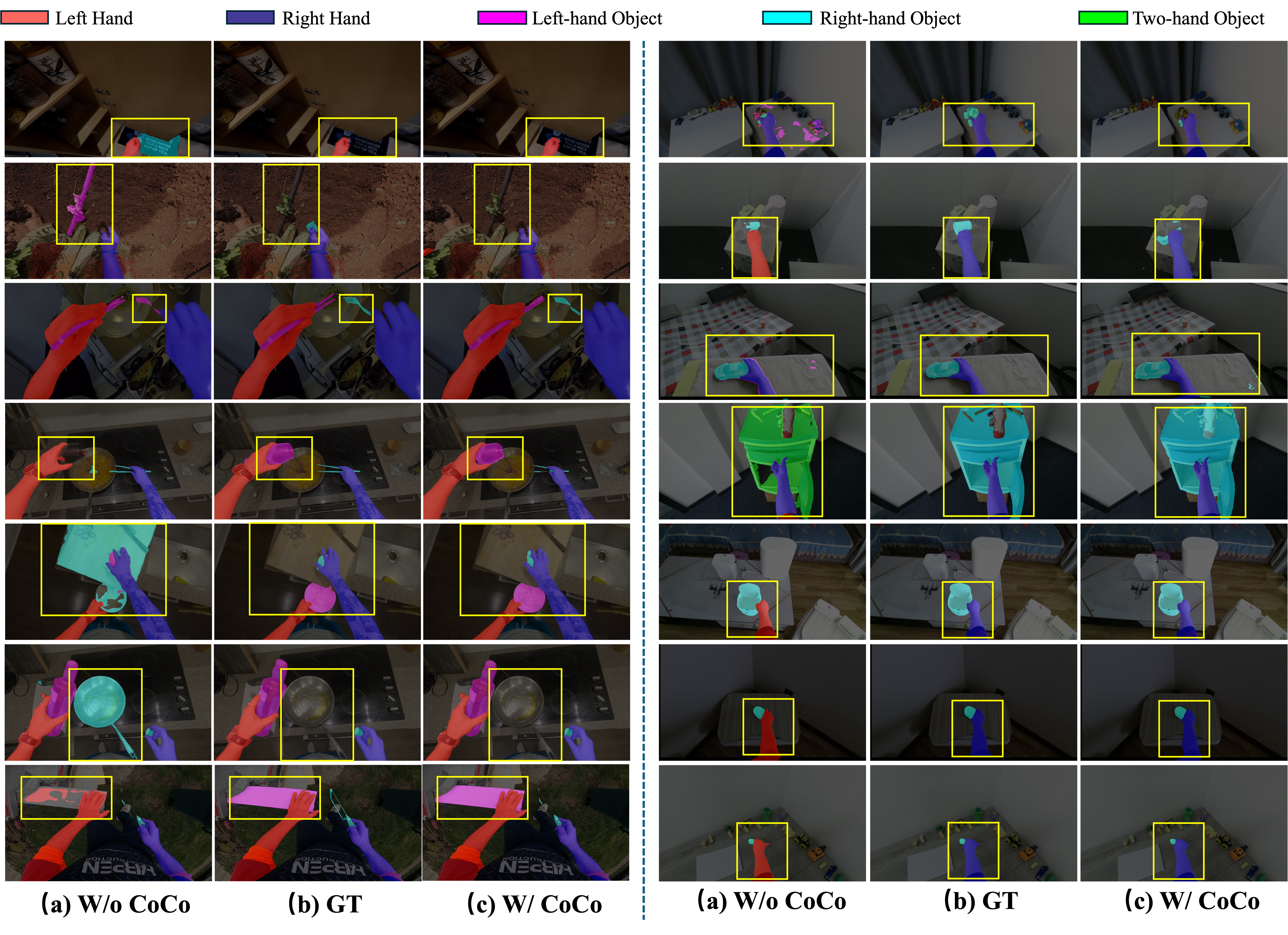
Новый подход позволяет более точно сегментировать руки и взаимодействующие с ними объекты на видео от первого лица, улучшая понимание контекста и правдоподобность изображения.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
В статье представлена модель InterFormer, использующая взаимодействие между рукой и объектом, градиентные признаки и функцию потерь CoCo для повышения точности семантической сегментации.
Несмотря на значительный прогресс в области компьютерного зрения, точное понимание взаимодействия человека и окружающей среды в эгоцентричных изображениях остается сложной задачей. В данной работе, посвященной ‘Interaction-aware Representation Modeling with Co-occurrence Consistency for Egocentric Hand-Object Parsing’, предложен новый подход к анализу взаимодействия рук и объектов, основанный на модели InterFormer, использующей динамическое формирование запросов и механизм обучения с учетом согласованности совместной встречаемости. Предложенный метод позволяет добиться существенного улучшения точности сегментации рук и активно используемых объектов, а также повысить физическую правдоподобность предсказаний. Сможет ли InterFormer стать основой для создания более эффективных и адаптивных систем восприятия в задачах, требующих понимания взаимодействия человека и окружающей среды?
Точность как Основа: Вызовы Сегментации Взаимодействий Руки и Объекта
Точное распознавание взаимодействий рук с объектами в перспективе от первого лица (EgoHOS) становится ключевым фактором для развития передовых технологий, таких как дополненная реальность и роботизированная помощь. В контексте дополненной реальности, EgoHOS позволяет виртуальным объектам реалистично взаимодействовать с руками пользователя, создавая эффект полного погружения. В свою очередь, для роботизированных систем, способных оказывать помощь человеку, понимание этих взаимодействий необходимо для безопасного и эффективного выполнения задач, например, при совместной сборке или манипулировании предметами. Развитие EgoHOS открывает новые возможности для создания интуитивно понятных интерфейсов и адаптивных роботизированных помощников, расширяя границы взаимодействия человека и машины.
Первые попытки сегментации взаимодействий руки и объекта в первом лице (EgoHOS) опирались на сверточные модели, однако эти модели демонстрировали ограниченные возможности в улавливании долгосрочных зависимостей, критически важных для понимания сложных взаимодействий. Сверточные сети, по своей природе, ориентированы на локальные признаки и испытывают трудности при анализе информации, разнесенной в пространстве и времени. Это приводило к неточностям в определении границ объектов и их взаимосвязи с рукой, особенно в динамичных сценах, где объекты частично или полностью перекрываются. В результате, эффективность таких моделей существенно снижалась при обработке реальных видеоданных, где присутствуют сложные взаимодействия и окклюзии.
Ограничения существующих методов сегментации рук и объектов в первом лице особенно ярко проявляются при частичной или полной окклюзии. В реальных условиях, когда объекты часто перекрывают друг друга или частично скрыты руками, стандартные алгоритмы испытывают значительные трудности с точным определением границ между рукой и объектом. Это приводит к снижению надежности и точности сегментации, что критически важно для приложений, требующих стабильной работы в динамичной среде, таких как системы дополненной реальности или роботизированные помощники. Проблема усугубляется тем, что существующие модели часто не способны эффективно учитывать контекстную информацию, необходимую для «восстановления» скрытых частей объекта или руки, что делает их уязвимыми к ошибкам в сложных ситуациях.

Трансформеры в EgoHOS: Новая Эра Моделирования Взаимодействий
Трансформерные подходы демонстрируют перспективность в задачах EgoHOS благодаря их способности моделировать долгосрочные зависимости между признаками руки и объекта. Традиционные методы часто испытывают трудности с улавливанием сложных взаимосвязей, возникающих в процессе взаимодействия, особенно когда объекты находятся на значительном расстоянии друг от друга или частично скрыты. Механизмы внимания, ключевой компонент трансформеров, позволяют эффективно учитывать контекст всей сцены, выделяя наиболее релевантные признаки для определения текущего действия и прогнозирования дальнейших взаимодействий. Это позволяет более точно оценивать позы рук, сегментировать объекты и понимать намерения человека, значительно повышая производительность систем EgoHOS по сравнению с подходами, основанными на рекуррентных или сверточных нейронных сетях.
Модель DETR, основанная на архитектуре Transformer, предоставляет надежную основу для многих систем EgoHOS, обеспечивая более точную локализацию и сегментацию объектов. В отличие от традиционных методов обнаружения объектов, основанных на anchor boxes и non-maximum suppression (NMS), DETR использует подход, основанный на прямом прогнозировании набора объектов с помощью небольшого фиксированного количества learnable object queries. Это позволяет избежать ручной настройки гиперпараметров, связанных с anchor boxes, и упрощает процесс обнаружения. Использование attention mechanism в архитектуре Transformer позволяет модели эффективно учитывать глобальный контекст изображения и устанавливать взаимосвязи между различными объектами, что повышает точность локализации и сегментации, особенно в сложных сценах с перекрывающимися объектами.
Простое применение существующих архитектур трансформаторов к задачам EgoHOS часто приводит к увеличению вычислительной сложности. Это связано с тем, что стандартные трансформаторы, разработанные для задач общего назначения, не оптимизированы для обработки специфических характеристик взаимодействия руки и объекта, таких как временные зависимости и пространственная близость. Необходима адаптация архитектуры, учитывающая эти нюансы, что требует дополнительных вычислительных ресурсов и усложняет процесс обучения модели. В результате, существующие подходы могут демонстрировать ограниченную эффективность при работе с реальными видеопотоками и требовать значительных аппаратных ресурсов для обеспечения приемлемой производительности.

InterFormer: Архитектура для Точного Моделирования Взаимодействий Руки и Объекта
ИнтерФормер (InterFormer) представляет собой новую структуру, разработанную для повышения точности и обобщающей способности EgoHOS за счет эффективного моделирования взаимодействий между рукой и объектом. В отличие от существующих подходов, ИнтерФормер фокусируется на прямом моделировании этих взаимодействий, что позволяет более точно сегментировать объекты в сложных сценариях, включая частичную видимость и перекрытия. Ключевым аспектом является способность системы к обобщению, что подтверждается результатами тестов на различных наборах данных, включая как внутренние, так и внешние тестовые наборы EgoHOS и mini-HOI4D. Это достигается за счет использования инновационных методов обработки признаков и обучения, направленных на улучшение понимания контекста взаимодействия рука-объект.
Инновационная архитектура InterFormer объединяет несколько ключевых методов для повышения качества представления признаков и точности сегментации. Метод IPP (Instance-aware Pooling Pyramid) обеспечивает эффективное агрегирование признаков на различных масштабах, учитывая индивидуальные экземпляры объектов. DQG (Dynamic Graph Query) позволяет динамически адаптировать процесс извлечения признаков в зависимости от контекста взаимодействия. DFS (Deep Feature Supervision) усиливает обучение за счет использования глубоких признаков для более точной сегментации. Внедрение функции потерь CoCo (Compositional Consistency) направлено на снижение количества иллюзий взаимодействия, что приводит к более реалистичной и точной сегментации объектов и их взаимодействий.
Фреймворк InterFormer демонстрирует высокую производительность в задачах EgoHOS, достигая среднего значения Intersection over Union (mIoU) в 73.22% на тестовом наборе данных EgoHOS. Особенно заметны улучшения в ситуациях, когда происходит перекрытие объектов (окклюзия). На тестовом наборе EgoHOS, не входящем в область обучения (out-of-domain), InterFormer опережает второй по результатам метод на 7.46%, а на датасете mini-HOI4D — на 3.20%. Эти результаты подтверждают эффективность InterFormer в обобщении и адаптации к новым, ранее не встречавшимся данным.
Внедрение функции потерь CoCo позволило снизить количество иллюзорных взаимодействий (некорректно определенных связей между рукой и объектом) на 0.64%. Данное снижение было достигнуто за счет более точной оценки и корректировки процесса сегментации, что привело к улучшению качества выделения объектов и рук в кадре. Использование CoCo loss способствует уменьшению ложных срабатываний и повышению надежности определения реальных взаимодействий, что критически важно для задач распознавания и анализа взаимодействий рука-объект.
Влияние и Перспективы: От Дополненной Реальности к Роботизированной Помощи
Повышенная точность InterFormer открывает новые перспективы для технологий дополненной реальности, позволяя создавать более плавное и реалистичное взаимодействие с виртуальными объектами. Благодаря способности более точно сегментировать руку и объекты, система способна корректно накладывать виртуальные элементы на реальный мир, обеспечивая убедительную иллюзию их физического присутствия. Это особенно важно для приложений, требующих высокой степени реализма, таких как виртуальные тренажеры, интерактивные игры и прототипирование дизайна, где точное соответствие виртуальных и реальных объектов критически важно для создания эффекта погружения и обеспечения интуитивно понятного пользовательского опыта. Возможность надежно отслеживать и понимать взаимодействие руки с виртуальными объектами также расширяет границы возможностей для дистанционного управления и совместной работы в виртуальной среде.
Повышенная точность сегментации руки и объекта, обеспечиваемая InterFormer, открывает новые перспективы для робототехники. Теперь роботы способны выполнять сложные манипуляции с повышенной ловкостью и надежностью, что критически важно для задач, требующих деликатности и точности. Например, сборка сложных механизмов, хирургические операции или работа с хрупкими предметами становятся более выполнимыми благодаря улучшенному распознаванию и пониманию взаимодействия между рукой и объектом. Это позволяет роботам адаптироваться к различным формам, размерам и текстурам объектов, обеспечивая более стабильный захват и контроль во время выполнения манипуляций. Улучшенная сегментация также снижает риск ошибок и повреждений, повышая безопасность и эффективность работы роботов в различных сферах применения.
Дальнейшие исследования InterFormer сосредоточены на расширении его возможностей для обработки более сложных сцен, динамически меняющихся условий и разнообразных взаимодействий между рукой и объектами. Предполагается, что это позволит создать системы, способные адаптироваться к новым ситуациям и демонстрировать более высокий уровень интеллекта. Особое внимание будет уделено обработке зашумленных данных и повышению робастности модели в реальных условиях эксплуатации, что критически важно для внедрения InterFormer в такие области, как робототехника и дополненная реальность. Развитие алгоритмов, позволяющих модели предсказывать и учитывать изменения в окружающей среде, откроет путь к созданию по-настоящему автономных и интеллектуальных систем взаимодействия.
Исследование, представленное в данной работе, демонстрирует стремление к математической чистоте в области компьютерного зрения. Авторы предлагают InterFormer, подход, основанный на взаимодействии признаков и когерентности совместного появления, что позволяет достичь большей точности в сегментации рук и объектов. Этот метод, по сути, требует доказательства корректности сегментации, а не просто достижения хороших результатов на тестовых данных. Как отмечал Дэвид Марр: «Вычислительная теория разума должна предложить объяснение того, как физические системы могут выполнять когнитивные задачи». В данном контексте, InterFormer представляет собой попытку воплотить эту идею, создавая алгоритм, который не только сегментирует, но и обеспечивает физическую правдоподобность взаимодействия рук и объектов.
Что Дальше?
Представленная работа, безусловно, демонстрирует прогресс в области сегментации рук и объектов взаимодействия в эгоцентричном зрении. Однако, необходимо признать, что достижение «физической правдоподобности» — это лишь приближение к истине, а не её полное отражение. Проблема заключается не в улучшении метрик, а в фундаментальном понимании того, что такое «взаимодействие» с математической точки зрения. Простое повышение точности сегментации, без формального описания физических ограничений, — это лишь усложнение, а не решение.
Будущие исследования, вероятно, должны быть сосредоточены на интеграции формальных моделей физики и геометрии непосредственно в архитектуру нейронных сетей. Попытки использовать «граничные признаки» и «CoCo loss» — это лишь косвенные меры, направленные на решение проблемы. Необходимо разработать алгоритмы, которые могли бы доказуемо гарантировать физическую согласованность сцены, а не просто статистически приближаться к ней. Иначе, мы лишь усложняем процесс аппроксимации, не приближаясь к элегантности истинного решения.
В конечном счете, задача состоит не в том, чтобы создавать более сложные сети, а в том, чтобы найти минимальное, но достаточное описание взаимодействия, которое могло бы быть формально проверено. До тех пор, пока мы не сможем доказать корректность алгоритма, а не просто продемонстрировать его работу на тестовом наборе данных, прогресс останется иллюзорным.
Оригинал статьи: https://arxiv.org/pdf/2602.20597.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Лучшие смартфоны. Что купить в июне 2026.
- Lenovo Legion Y70 (2026) ОБЗОР: скоростная зарядка, чёткое изображение, много памяти
- Motorola Moto G47 ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, большой аккумулятор
- vivo iQOO 15T ОБЗОР: огромный накопитель, яркий экран, плавный интерфейс
- Что купить фотографу. Рекомендации
- Honor Play 80 Pro ОБЗОР: плавный интерфейс, большой аккумулятор, удобный сенсор отпечатков
- Honor Magic8 RSR Porsche Design ОБЗОР: замедленная съёмка видео, беспроводная зарядка, чёткое изображение
- Фотографируем муравьёв с Андреем Павловым
- Realme 16T ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, высокая автономность
- Обзор объектива Tokina 11-16mm f/2.8 AF
2026-02-25 09:24