Робофутбол: Обучение гуманоидных роботов сложным навыкам
![Разработана комплексная система [latex]PAiD[/latex], позволяющая гуманоидному роботу освоить навыки футбола посредством последовательного обучения: от адаптации движений человека и отслеживания мяча без учета помех, через обобщение навыков удара по неподвижным и катящимся мячам с использованием визуального восприятия, до преодоления разрыва между симуляцией и реальностью за счет согласования динамики контакта и учета физически обоснованного шума, что в конечном итоге позволило успешно развернуть систему на платформе Unitree G1.](https://arxiv.org/html/2602.05310v1/x1.png)
В новой работе представлена прогрессивная система, позволяющая роботам осваивать навыки игры в футбол, от точного движения до адаптации к реальным условиям.
В новой работе представлена прогрессивная система, позволяющая роботам осваивать навыки игры в футбол, от точного движения до адаптации к реальным условиям.
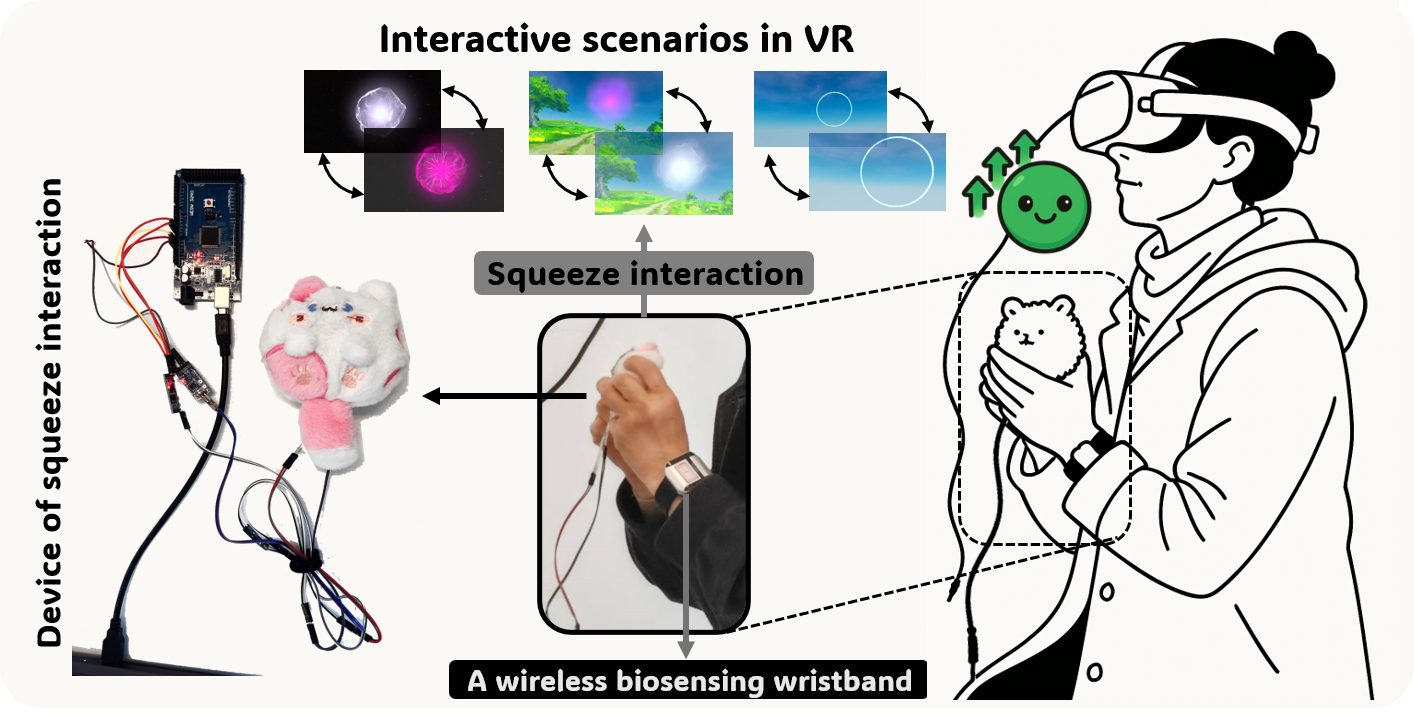
Новое исследование показывает, как сочетание виртуальной реальности и тактильных взаимодействий может эффективно снижать уровень стресса и улучшать эмоциональное состояние.

Исследование показывает, как разговорный ИИ может стать ключевым элементом интерактивных выставок под открытым небом, улучшая впечатления посетителей и углубляя погружение в контент.
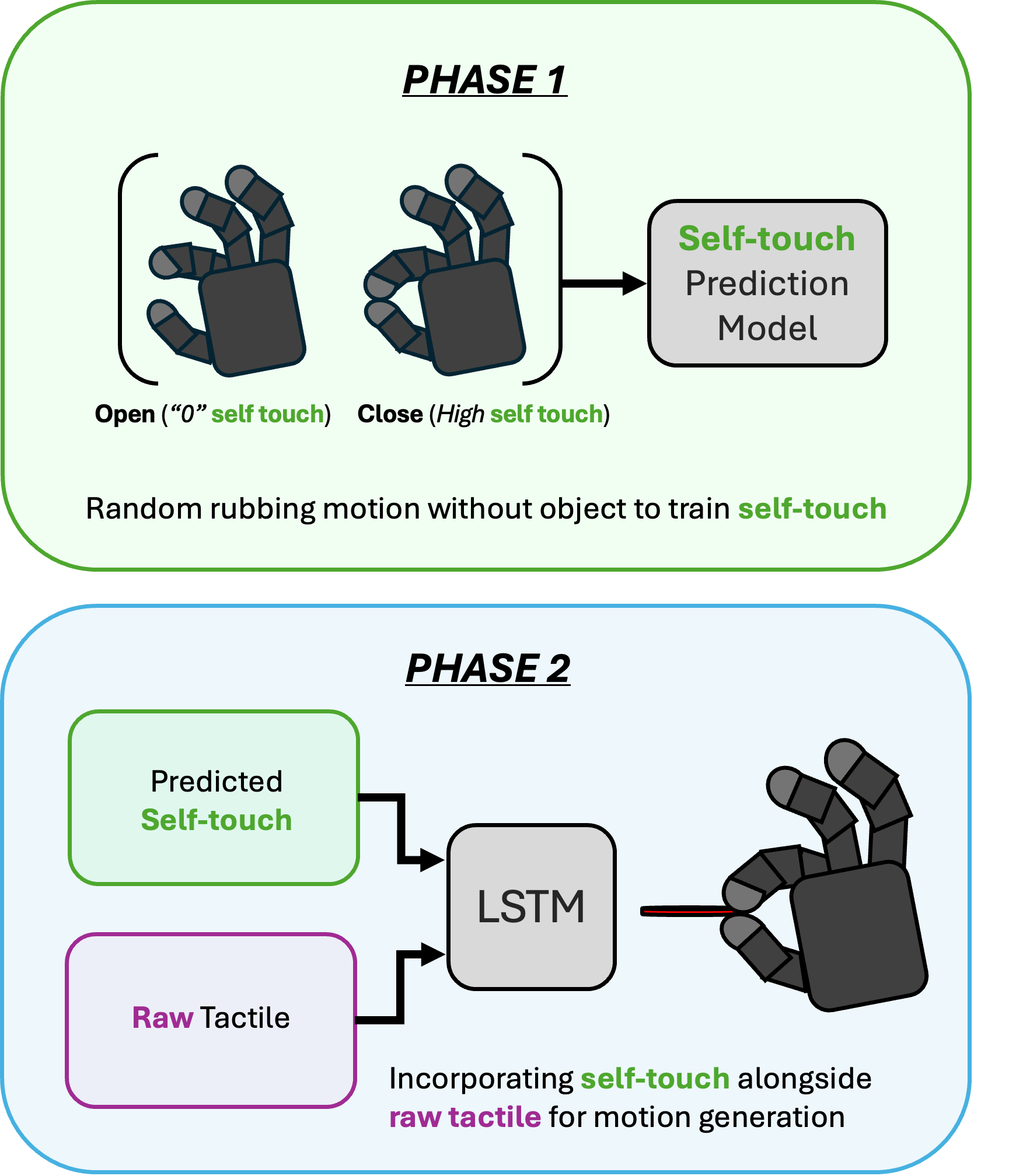
Новая система глубокого обучения позволяет роботам точнее манипулировать предметами, фильтруя собственные тактильные ощущения и распознавая внешние контакты.
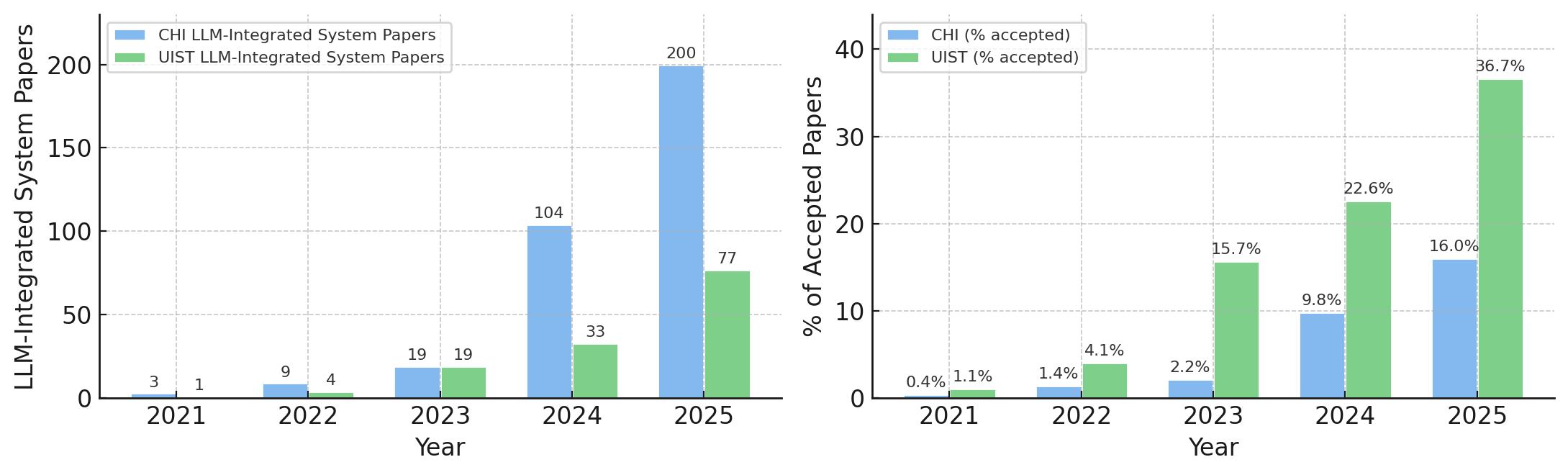
Новое поколение систем взаимодействия с человеком, основанных на больших языковых моделях, ставит перед исследователями вопросы надёжности и стандартов отчётности.
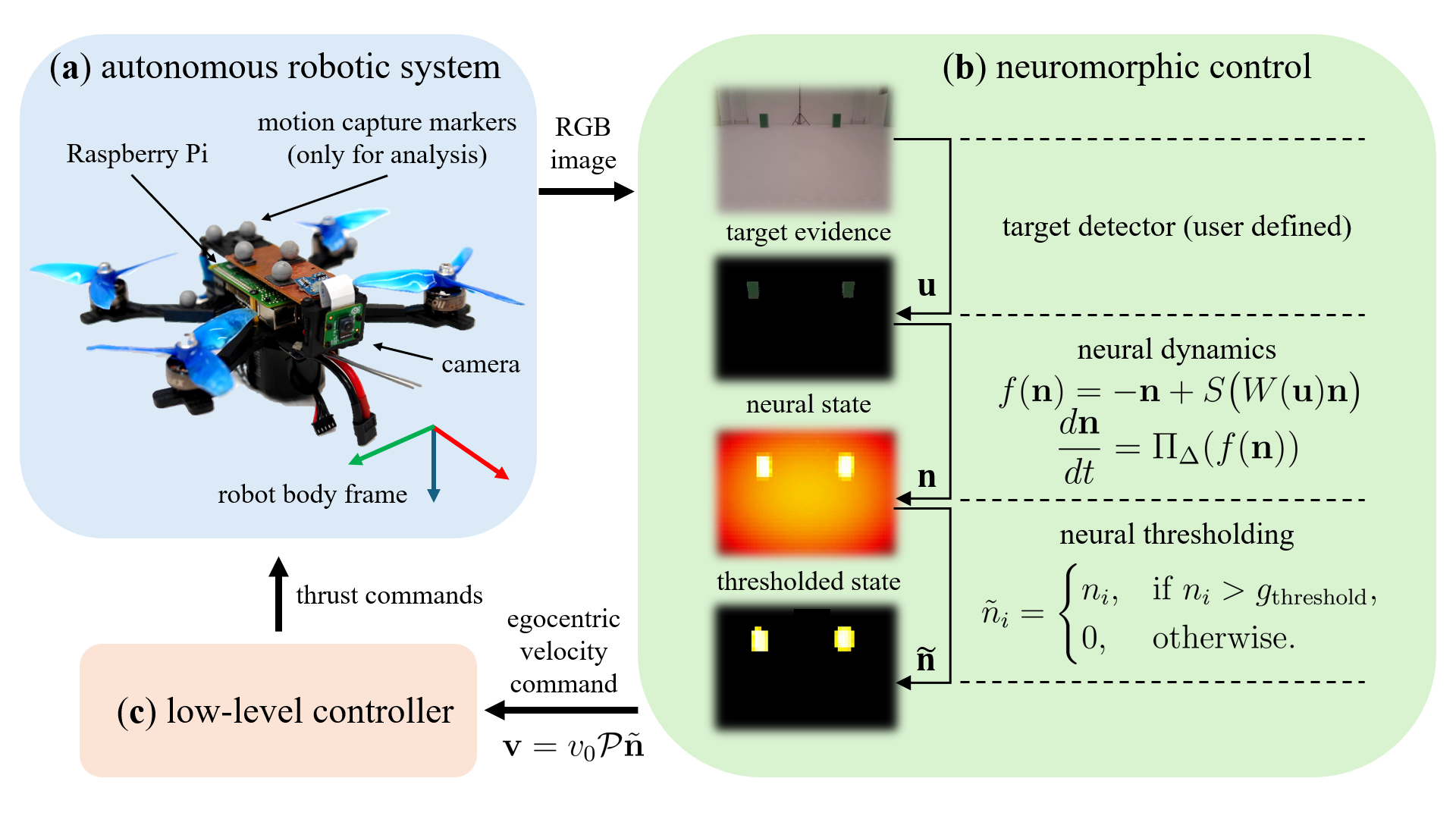
Новый подход к управлению роботами объединяет реактивные и рациональные стратегии, позволяя достичь надежной и интерпретируемой автономной навигации.
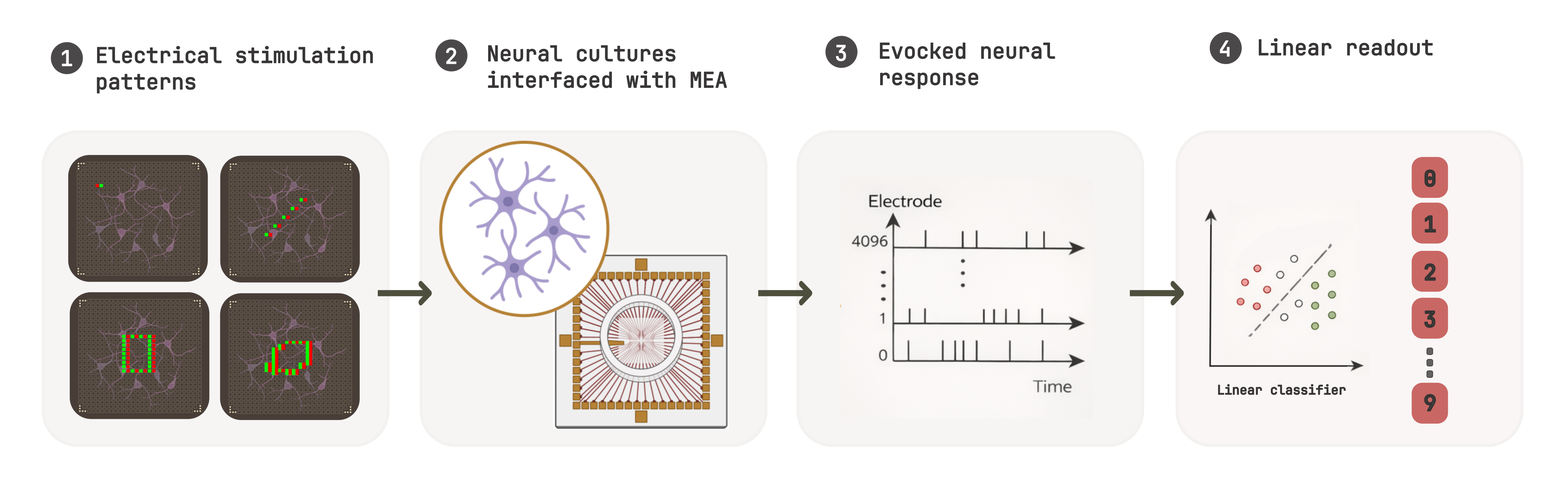
Исследование демонстрирует принципиально новый подход к распознаванию визуальных паттернов, вдохновленный работой биологических нейронных сетей и реализованный на основе резервуарного вычисления.
![Визуально-тактильная модель мира прогнозирует траектории движения, согласующиеся с заданными командами вдоль основных осей координат ([latex] \pm x, \pm y, \pm z [/latex]) и для команд открытия/закрытия захвата, демонстрируя способность к предсказанию динамики взаимодействия с окружением.](https://arxiv.org/html/2602.06001v1/x9.png)
Новое исследование объединяет зрение и осязание, позволяя роботам лучше понимать и взаимодействовать с окружающим миром.
![Единая модель InterPrior, обученная на наборе данных OMOMO[28], демонстрирует способность к обобщению на ранее не встречавшиеся объекты и взаимодействия из наборов данных BEHAVE[3] и HODome[96], подтверждая её потенциал в задачах переноса обучения.](https://arxiv.org/html/2602.06035v1/x3.png)
Исследователи разработали систему, позволяющую создавать более естественные и универсальные взаимодействия человека с окружающими предметами в виртуальной среде.
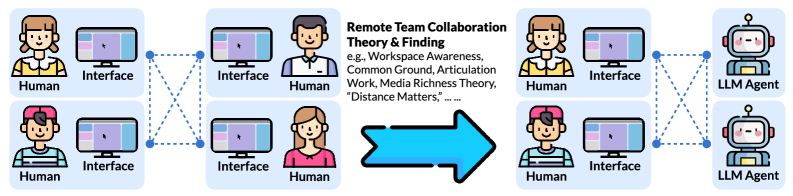
В статье предлагается концепция взаимодействия с большими языковыми моделями как с удаленными коллегами, что открывает новые перспективы для эффективного сотрудничества.