Автор: Денис Аветисян
Новый подход позволяет создавать физически достоверные виртуальные копии загроможденных пространств на основе всего лишь одного изображения.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"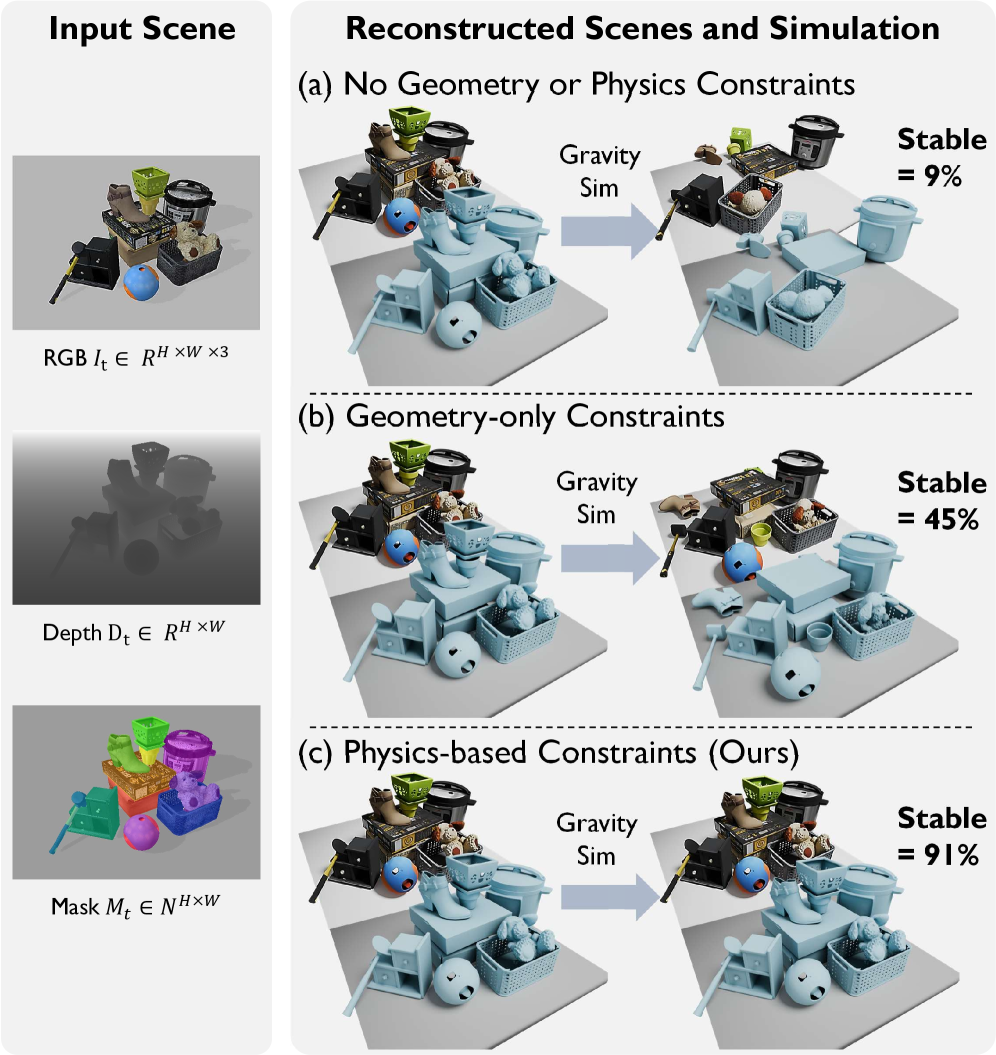
Предложена платформа Real2Sim, использующая дифференцируемую физику и иерархическую оптимизацию для реконструкции сцен и обеспечения физической устойчивости объектов.
Восстановление физически достоверных 3D-сцен по данным одноканального наблюдения является сложной задачей, особенно в условиях высокой загроможденности. В данной работе, ‘Real-to-Sim for Highly Cluttered Environments via Physics-Consistent Inter-Object Reasoning’, предлагается новый конвейер Real-to-Sim, реконструирующий физически согласованные 3D-сцены из RGB-D данных с помощью дифференцируемой оптимизации, моделирующей пространственные зависимости через граф контактов. Предложенный подход позволяет совместно уточнять позы объектов и их физические свойства, обеспечивая высокую физическую достоверность реконструированных сцен и реалистичное воспроизведение динамики контактов в реальном мире. Не откроет ли это путь к более надежным и эффективным алгоритмам роботизированной манипуляции в сложных, загроможденных средах?
Моделирование Реальности: Преодоление Разрыва между Симуляцией и Практикой
Робототехника сталкивается с существенным разрывом между симуляцией и реальным миром, что серьезно затрудняет внедрение разработанных алгоритмов управления в практические приложения. Обучение робота в виртуальной среде часто не позволяет ему успешно адаптироваться к непредсказуемым условиям реальной физической среды, приводя к ошибкам и неудачам при попытке переноса полученных навыков. Этот “разрыв реальности” требует разработки более совершенных методов моделирования, способных учитывать все тонкости взаимодействия робота с окружающим миром, включая неровности поверхности, трение и другие факторы, которые сложно точно воспроизвести в симуляции. Преодоление этой проблемы является ключевым шагом к созданию надежных и автономных робототехнических систем, способных эффективно функционировать в различных условиях.
Традиционное роботизированное моделирование зачастую страдает от недостаточной реалистичности, что приводит к сбоям при переносе разработанных алгоритмов управления на физических роботов. Неточности в симуляции, касающиеся, например, трения, упругости материалов или динамики сложных систем, приводят к расхождениям между виртуальным и реальным поведением. В результате, политика, успешно работающая в симуляции, может оказаться неэффективной или даже опасной при применении к реальному роботу, требуя дополнительных настроек и адаптации, а порой и полного пересмотра стратегии управления. Это несоответствие, известное как «разрыв между реальностью и симуляцией», существенно замедляет процесс разработки и внедрения робототехнических систем в практические приложения.
Точность моделирования контактов и физических взаимодействий играет фундаментальную роль в обеспечении надежной работы роботов при манипулировании объектами и навигации в реальном мире. Недостаточно точное представление сил трения, деформации материалов и столкновений приводит к значительным расхождениям между симуляцией и реальностью, что снижает эффективность и безопасность робототехнических систем. Именно детальное и правдоподобное воспроизведение этих физических явлений позволяет создавать алгоритмы управления, которые успешно адаптируются к непредсказуемости окружающей среды и обеспечивают стабильное выполнение поставленных задач, будь то сборка сложных конструкций или перемещение по пересеченной местности. Разработка передовых методов моделирования, учитывающих сложные динамические процессы, является ключевым направлением в современной робототехнике.
Для успешного преодоления разрыва между симуляцией и реальностью необходимы методы, способные достоверно воспроизводить динамику реального мира в виртуальной среде, однако существующие подходы часто демонстрируют недостаточную стабильность. Проблема заключается в сложности точного моделирования физических взаимодействий, включая контакт, трение и деформацию материалов, что приводит к расхождениям между поведением робота в симуляции и в реальном мире. Нестабильность проявляется в виде непредсказуемых отклонений, приводящих к сбоям в выполнении задач, даже если алгоритм успешно протестирован в симуляторе. Разработка алгоритмов, устойчивых к этим расхождениям, и создание более точных моделей физики взаимодействия являются ключевыми задачами для широкого внедрения робототехники в реальные условия, позволяя создавать системы, способные надежно функционировать в непредсказуемой среде.
Физически Обоснованная Оптимизация: Гарантия Стабильности и Реалистичности
Оптимизация с учетом физических ограничений (Physics-Constrained Optimization) представляет собой методологию, обеспечивающую физическую правдоподобность при реконструкции сцен и манипулировании объектами. Данный подход позволяет создавать и изменять сцены, соблюдая законы физики, что особенно важно для задач, требующих реалистичного моделирования взаимодействия объектов. В основе лежит формирование целевой функции, включающей как задачу реконструкции/манипуляции, так и физические ограничения, обеспечивающие стабильность и предотвращающие нереалистичные ситуации, такие как проникновение объектов друг в друга или нарушение равновесия. Это позволяет получать физически корректные и правдоподобные результаты, необходимые для широкого спектра приложений, включая робототехнику, компьютерную графику и симуляцию.
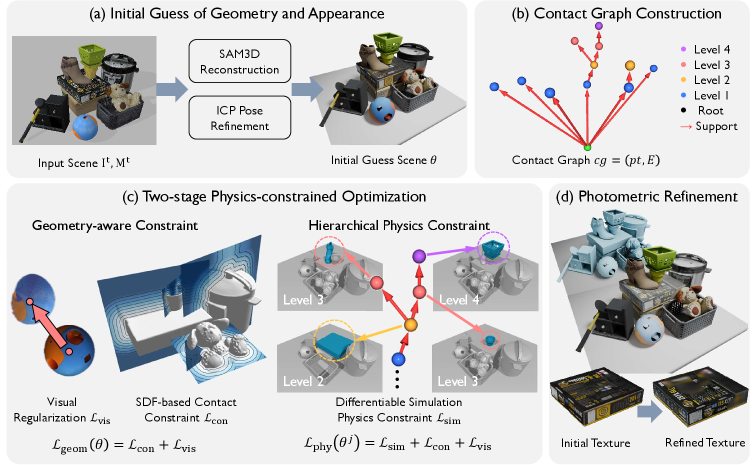
Подход использует дифференцируемое моделирование жестких тел (DiffSDFSim) для расчета сил контакта и обеспечения стабильности. DiffSDFSim позволяет вычислять градиенты сил контакта относительно параметров сцены, что необходимо для оптимизации. В рамках данной системы, контактные силы моделируются как функции от расстояния между поверхностями объектов, что позволяет учитывать как притяжение, так и отталкивание. Дифференцируемость симуляции позволяет использовать градиентный спуск для итеративной оптимизации геометрии сцены и/или параметров управления, направленной на достижение стабильного состояния равновесия и реалистичного поведения объектов при взаимодействии.
Для обеспечения реалистичного поведения в процессе реконструкции и манипулирования сценами, в рамках оптимизации используются ограничения, предотвращающие взаимное проникновение объектов (ограничение непроникновения) и поддерживающие статическое равновесие. Ограничение непроникновения гарантирует, что объекты не пересекаются друг с другом, что соответствует физической реальности. Поддержание статического равновесия подразумевает, что результирующая сила и момент, действующие на объект, равны нулю, обеспечивая его устойчивое положение. Комбинация этих ограничений позволяет моделировать взаимодействия между объектами, которые соответствуют законам физики, что критически важно для достоверного моделирования и симуляции.
Эффективность данного подхода напрямую зависит от точного представления геометрии объектов с использованием Signed Distance Functions (SDF). SDF позволяют однозначно определить расстояние от любой точки пространства до поверхности объекта, что критически важно для корректного моделирования контактов и предотвращения проникновения объектов друг в друга. В ходе симуляций в загроможденных сценах, использование SDF привело к повышению физической стабильности на 38% по сравнению с базовыми методами, что подтверждает значимость точного геометрического представления для реалистичного моделирования физических взаимодействий.
Понимание Сцены Через Сеть Контактов: Формализация Взаимодействий
Граф контактов является ключевым элементом представления взаимосвязей между объектами в сцене, отражая как физический контакт, так и опору между ними. Каждый узел в графе представляет объект, а ребра — точки или поверхности, через которые осуществляется взаимодействие. Этот граф позволяет формализовать поддержку одного объекта другим, что критически важно для моделирования стабильности и предотвращения падений. Использование графа контактов обеспечивает эффективное представление сложных взаимосвязей, необходимых для анализа сцены и планирования манипуляций, поскольку он явно кодирует информацию о физических ограничениях и зависимостях между объектами. Формальное представление контактов в виде графа упрощает алгоритмическую обработку и позволяет использовать методы графового анализа для решения задач, связанных со стабильностью и планированием движения.
Иерархическая оптимизация использует граф контактов для эффективной корректировки состояний объектов и обеспечения стабильности системы. Алгоритм начинает с определения корневого объекта в графе контактов, а затем последовательно оптимизирует состояния всех зависимых объектов, двигаясь вниз по иерархии. Такой подход позволяет уменьшить вычислительную сложность по сравнению с оптимизацией всех объектов одновременно, поскольку ограничения применяются поэтапно, начиная с наиболее важных связей. Применение иерархического подхода значительно повышает скорость сходимости алгоритма и позволяет добиться стабильной конфигурации объектов в сложных сценах.
Система использует модель поддерживающего дерева для систематического решения задач, связанных с ограничениями и неоднозначностями в определении положения объектов. Эта модель позволяет представить иерархию опорных связей между объектами, начиная с объектов, непосредственно контактирующих с опорной поверхностью, и продвигаясь вверх по дереву до объектов, поддерживаемых другими объектами. Применяя алгоритмы к этому дереву, система последовательно разрешает кинематические и динамические ограничения, обеспечивая физически правдоподобные и стабильные конфигурации сцены. В частности, данный подход позволяет однозначно определить положение объектов, которые могли бы быть неоднозначно определены при анализе только отдельных контактов, и эффективно обрабатывать сложные сценарии с множеством взаимосвязанных объектов.
Предложенная система построения понимания сцены и планирования манипуляций демонстрирует высокую точность реконструкции окружения и надежность планирования действий. В ходе реальных экспериментов, использование данной системы позволило достичь коэффициента стабильности в 72%, что подтверждает её эффективность в задачах, требующих точного моделирования физических взаимодействий и поддержания устойчивости объектов.

Надежный Перенос Политик с Real2Sim: Преодоление Разрыва между Виртуальным и Реальным
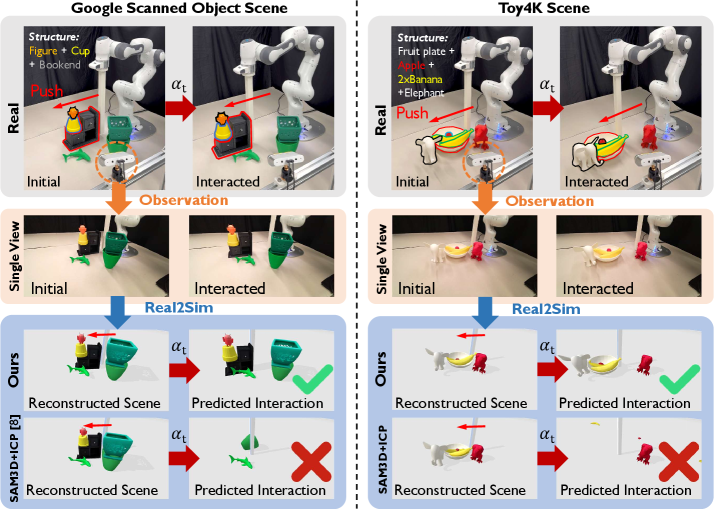
Система Real2Sim успешно преодолевает разрыв между виртуальной симуляцией и реальным миром, используя совокупность ранее описанных методов. Она объединяет точную реконструкцию сцены, достигаемую благодаря алгоритмам SAM3D и ICP, с применением доменной рандомизации, что позволяет обучать роботов манипулированию объектами в условиях, приближенных к реальным. Такой подход не только повышает надежность и эффективность работы роботов, но и обеспечивает устойчивость к различным вариациям, встречающимся в реальной среде, что подтверждается результатами экспериментов с использованием 40-миллиметрового среднего расстояния Унилатерального Чемфера.
Система Real2Sim достигает высокой точности воссоздания окружающей среды и определения положения объектов благодаря применению передовых алгоритмов, таких как SAM3D и ICP. SAM3D, использующий методы трехмерной сегментации, позволяет детально воссоздавать геометрию сцены на основе данных с датчиков. Затем, итеративный ближайший пункт (ICP) применяется для точной регистрации воссозданной модели с реальными данными, корректируя положение объектов и повышая общую точность реконструкции. Такой комбинированный подход обеспечивает надежное определение положения объектов даже в сложных и динамичных условиях, что является ключевым для успешного переноса обученных в симуляции политик в реальный мир.
Система, используя метод доменной рандомизации, способна обучаться политикам, устойчивым к изменениям реальных условий. Этот подход предполагает намеренное внесение разнообразных вариаций в симуляцию — от текстур и освещения до физических параметров объектов и помех в сенсорных данных. В результате, алгоритм не просто запоминает конкретную симуляцию, а обобщает знания, позволяя ему успешно функционировать в непредсказуемой реальной среде. Искусственно создавая широкий спектр сценариев, система приобретает устойчивость к шумам, погрешностям и неожиданным отклонениям, которые неизбежно возникают при переходе от виртуальной среды к практическому применению. Это существенно повышает надежность и эффективность роботизированных манипуляций в реальном мире.
Экспериментальные исследования показали, что предложенный подход значительно повышает эффективность и надежность задач манипулирования роботами в реальных условиях. Оценка точности, произведенная с использованием метрики Unilateral Chamfer Distance, продемонстрировала среднее значение в 40 мм. Этот показатель свидетельствует о высокой степени соответствия между симулированными и реальными данными, а также о способности системы успешно адаптироваться к вариациям, возникающим в процессе взаимодействия с физическим миром. Такая точность открывает новые возможности для автоматизации сложных задач, требующих прецизионного управления и надежной работы роботов в непредсказуемой среде.
Без точного определения задачи любое решение — шум. Данное исследование демонстрирует необходимость строгого подхода к моделированию физически достоверных цифровых двойников сложных сцен. Авторы предлагают иерархическую оптимизацию, учитывающую физические свойства объектов и их взаимодействия. Такой подход позволяет преодолеть ограничения существующих методов Real2Sim, обеспечивая создание виртуальных сред, максимально приближенных к реальности. Как отмечал Роберт Тарьян: «Самое важное в программировании — это умение понимать проблему и находить элегантное решение». Построение физически стабильной и корректной симуляции требует математической чистоты и строгости в определении условий взаимодействия объектов, что полностью соответствует принципам, сформулированным Тарьяном.
Куда Далее?
Представленная работа, безусловно, демонстрирует элегантность подхода к генерации цифровых двойников загроможденных сцен. Однако, стоит признать, что истинная проверка любого алгоритма — это не его успешная работа на ограниченном наборе тестовых данных, а его обобщающая способность. Вопрос о масштабируемости предложенного иерархического оптимизационного процесса до сцен, содержащих сотни или даже тысячи объектов, остается открытым. Асимптотическая сложность, несомненно, потребует дальнейшего анализа и, возможно, разработки принципиально новых методов.
Крайне важно сосредоточиться на проблеме неполноты информации. Одно изображение RGB-D, каким бы качественным оно ни было, содержит лишь проекцию трехмерного мира. Восстановление физических свойств объектов из такой неполной информации неизбежно связано с введением априорных ограничений и предположений. Необходимо исследовать методы, позволяющие оценить степень влияния этих предположений на конечный результат и, возможно, разработать способы их автоматической адаптации.
И, наконец, стоит задуматься о фундаментальной природе “физической состоятельности”. Достаточно ли просто удовлетворять законам Ньютона? Не упускает ли предложенный подход более тонкие аспекты физического поведения, такие как деформации, трение и динамические взаимодействия, которые могут существенно влиять на реалистичность симуляции? Поиск ответа на этот вопрос, вероятно, и определит направление развития данной области в ближайшем будущем.
Оригинал статьи: https://arxiv.org/pdf/2602.12633.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Нейросети как посредники: этика и границы взаимодействия с разумом
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- Как самому почистить матрицу. Продолжение.
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Неважно, на что вы фотографируете!
- Калькулятор глубины резкости. Как рассчитать ГРИП.
- Что такое глубина резкости в фотографии?
- MSI Katana 17 HX B14WGK ОБЗОР
- vivo iQOO Z11 Turbo ОБЗОР: огромный накопитель, отличная камера, много памяти
- Обзор объектива Nikkor AF-S 24-70mm f/2.8G ED
2026-02-16 08:14