Автор: Денис Аветисян
Новый подход к поиску объектов в домашних условиях учитывает индивидуальные особенности поведения человека, делая взаимодействие с «умным домом» более естественным и эффективным.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"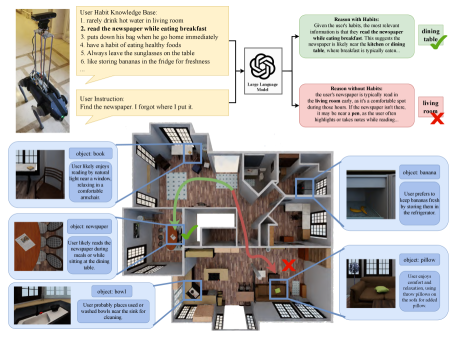
Представлен новый бенчмарк UcON и модуль извлечения пользовательских привычек для персонализированного поиска объектов в пространстве.
Несмотря на значительный прогресс в области робототехники, навигация в реальных домашних условиях часто упускает из виду индивидуальные особенности поведения людей. В данной работе, представленной в статье ‘User-Centric Object Navigation: A Benchmark with Integrated User Habits for Personalized Embodied Object Search’, предлагается новый эталонный набор данных UcON, учитывающий привычки пользователей при размещении предметов, что позволяет агентам более эффективно ориентироваться в пространстве. Эксперименты показали, что учет этих привычек значительно повышает успешность навигации по сравнению с подходами, основанными только на общих представлениях о среде. Сможем ли мы создать действительно адаптивные робототехнические системы, способные учитывать уникальные особенности каждого пользователя и оптимизировать взаимодействие с окружающей средой?
За гранью простейшей навигации: Искусственный интеллект и понимание контекста
Традиционные методы навигации для искусственного интеллекта зачастую основываются на упрощенных эвристиках, которые не учитывают многогранность реальных сред и особенности человеческого поведения. Эти подходы, как правило, предполагают идеальные условия и предсказуемость объектов, что совершенно не соответствует динамичной и непредсказуемой природе окружающего мира. В результате, роботы и виртуальные агенты испытывают затруднения при взаимодействии с реальными пространствами, где объекты могут быть заблокированы, перемещены или изменены пользователями. Использование лишь базовых правил движения приводит к неэффективности и неспособности адаптироваться к новым ситуациям, что существенно ограничивает возможности применения искусственного интеллекта в повседневной жизни и сложных производственных процессах.
Для успешной навигации в реальных помещениях, искусственному интеллекту необходимо не просто определять местоположение объектов, но и прогнозировать их вероятное нахождение, опираясь на сочетание общих знаний о мире и индивидуальных привычек пользователей. Например, агент должен понимать, что чашка обычно стоит на кухне, но конкретный пользователь может предпочесть оставлять её на рабочем столе. Подобное рассуждение требует от ИИ способности к моделированию поведения человека и интеграции различных источников информации — задача, значительно превосходящая возможности современных систем, которые зачастую полагаются на упрощенные алгоритмы и не учитывают контекст и личные предпочтения. Это представляет собой ключевую проблему в создании по-настоящему автономных и полезных роботов-помощников.
UCON: Новая реальность в бенчмарках навигации
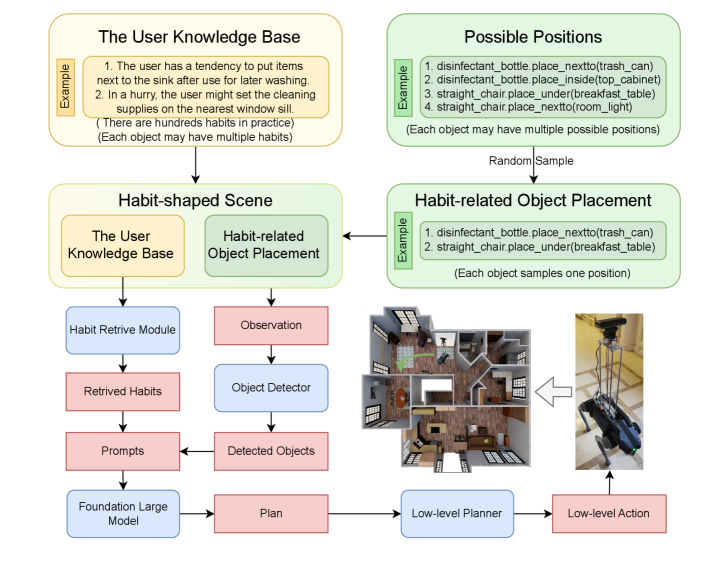
Тестовый набор UcON представляет собой реалистичную платформу для оценки навигации, ориентированной на пользователя. Он включает в себя 489 категорий объектов и использует персонализированные модели поведения пользователей для создания разнообразных сценариев. В отличие от традиционных бенчмарков, UcON фокусируется на оценке способности агентов ориентироваться в среде, учитывая вероятные привычки и предпочтения пользователя, что обеспечивает более точную оценку эффективности алгоритмов навигации в реальных условиях. Это достигается за счет интеграции больших объемов данных о пользовательских привычках, позволяющих генерировать правдоподобные и сложные сценарии взаимодействия.
В составе UCON содержится более 22 600 поведенческих паттернов, связанных с объектами, что создает разнообразные и сложные сценарии для агентов искусственного интеллекта. Эти паттерны описывают вероятные взаимодействия пользователей с различными предметами в окружающей среде, например, привычку класть ключи на определенную полку или оставлять книгу на прикроватной тумбочке. Объем и разнообразие этих паттернов позволяют UCON генерировать реалистичные и непредсказуемые ситуации, требующие от AI-агентов адаптивности и способности к обобщению при навигации и взаимодействии с окружением. Разнообразие паттернов охватывает широкий спектр категорий объектов (489) и учитывает индивидуальные особенности поведения, создавая сложную и правдоподобную модель пользовательского опыта.
База знаний о привычках пользователей, используемая в UcON, прошла оценку правдоподобия посредством анкетирования людей. Результаты показали, что 98.5% представленных привычек являются реалистичными и осуществимыми в повседневной жизни. Данная оценка проводилась с целью подтверждения, что сценарии, генерируемые для бенчмарка, соответствуют типичному поведению пользователей и обеспечивают валидную основу для оценки алгоритмов навигации.
В рамках бенчмарка UcON, размещение объектов в симулированных средах подверглось валидации на соответствие описанным пользовательским привычкам. Проверка показала, что в 96.7% случаев расположение объектов согласуется с заявленными паттернами поведения, что обеспечивает высокую реалистичность и надежность среды для оценки алгоритмов навигации. Данный показатель подтверждает, что симуляции адекватно отражают вероятные сценарии использования объектов в реальной жизни, что критически важно для оценки производительности и применимости ИИ-агентов в задачах навигации.
Симулятор Omnigibson играет ключевую роль в создании сцен, соответствующих пользовательским привычкам, и обеспечивает надежную платформу для оценки алгоритмов навигации. Он позволяет генерировать реалистичные виртуальные окружения, в которых размещение объектов и их взаимосвязь обусловлены статистически значимыми моделями поведения пользователей. Это достигается за счет интеграции с базой знаний о привычках пользователей и использования процедурной генерации сцен, что позволяет создавать большое количество разнообразных и правдоподобных сценариев для тестирования и сравнения различных подходов к навигации. Возможности симулятора включают реалистичную физику, визуализацию и поддержку различных датчиков, что делает его эффективным инструментом для разработки и оценки агентов, способных ориентироваться в сложных домашних условиях.
Интеллект в деталях: Использование больших языковых моделей для навигации с учетом привычек
Экспериментальные результаты демонстрируют, что большие языковые модели (LLM) эффективно применяются для рассуждений о местоположении объектов в окружающей среде. Этот процесс основывается на двух ключевых источниках информации: детальных описаниях сцены и данных о привычках пользователя. Использование LLM позволяет интегрировать визуальные данные и контекстную информацию о предпочтениях и рутинных действиях пользователя для более точного определения местоположения целевых объектов и построения оптимальных маршрутов навигации. Эффективность подхода подтверждается улучшением показателей точности локализации и успешности навигации в различных сценариях.
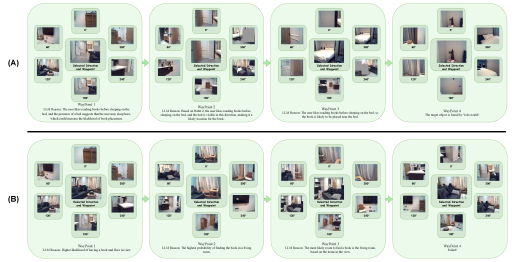
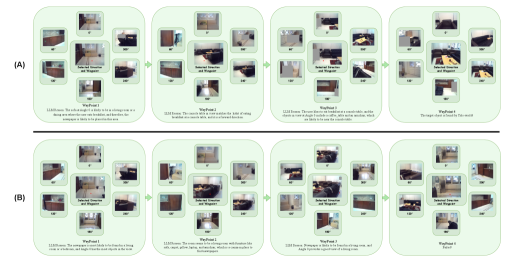
Методы, такие как PixelNav и L3MVN, использующие большие языковые модели (LLM), обеспечивают возможность выбора направления навигации на основе визуальной информации. PixelNav анализирует изображения окружающей среды для определения оптимального пути, в то время как L3MVN предсказывает вероятность нахождения определенных объектов в различных местах. Оба подхода используют LLM для обработки визуальных данных и принятия решений о навигации, что позволяет им эффективно функционировать в сложных и динамичных средах. LLM выступают в роли механизма логического вывода, обрабатывая входные данные и формируя соответствующие команды для навигационного агента.
Модуль извлечения привычек (Habit Retrieval Module) является ключевым компонентом системы, обеспечивающим доступ к релевантным данным о пользовательских привычках из Базы Знаний о Привычках Пользователя. Для извлечения этих данных используется модель BGE-M3, которая выполняет семантический поиск и извлекает привычки, наиболее соответствующие текущему контексту навигации. Полученные данные о привычках затем предоставляются Большой Языковой Модели (LLM) в качестве дополнительной информации, что позволяет улучшить процесс рассуждения и повысить точность выбора направления движения.
Модуль LGX улучшает процесс рассуждений, используя большие языковые модели (LLM) для определения направления к объектам на основе здравого смысла. В отличие от методов, полагающихся исключительно на визуальную информацию или предсказуемые паттерны поведения, LGX использует LLM для вывода вероятного местоположения объекта, учитывая общепринятые знания о типичном размещении предметов в окружающей среде. Это позволяет системе более точно определять направление движения, даже в ситуациях, когда визуальные подсказки ограничены или неоднозначны, и повышает эффективность навигации, особенно в сложных или незнакомых пространствах. Фактически, LGX предоставляет LLM дополнительный контекст, позволяя модели делать более обоснованные предположения о местоположении целевых объектов.
За пределами восприятия: Планирование и адаптация в динамичной среде
Предложенный подход выходит за рамки простого восприятия окружающей среды, внедряя многошаговое планирование и обновление убеждений. Это позволяет агенту эффективно осуществлять поиск объектов, не ограничиваясь мгновенным визуальным контактом. Вместо этого, система способна формировать гипотезы о возможном местонахождении цели, а затем последовательно исследовать пространство, уточняя эти предположения на основе получаемой обратной связи. Такой механизм не только повышает скорость и точность поиска, но и обеспечивает адаптивность к сложным и динамичным условиям, где объекты могут быть частично скрыты или перемещаться.
Память о предыдущих исследованиях играет ключевую роль в эффективной навигации агента в динамической среде. Вместо повторного обследования уже изученных областей, система сохраняет информацию о ранее посещенных локациях и препятствиях, создавая своего рода “карту памяти”. Это позволяет значительно сократить время поиска, избежать избыточных действий и оптимизировать процесс исследования. Сохранение данных о пройденных маршрутах и обнаруженных объектах не только повышает скорость навигации, но и способствует более рациональному использованию ресурсов, особенно в сложных и обширных пространствах, где повторные исследования могут быть энергозатратными и неэффективными.
Разработанная система навигации демонстрирует высокую устойчивость и адаптивность в сложных, реалистичных условиях благодаря интеграции нескольких ключевых компонентов. Способность к многоступенчатому планированию, обновлению убеждений и использованию памяти о ранее исследованных областях позволяет агенту эффективно ориентироваться и избегать повторных поисков. Такая комбинация обеспечивает не только успешное достижение поставленных целей, но и гибкость в реагировании на изменяющиеся обстоятельства и неожиданные препятствия, что особенно важно при работе в динамичных средах, имитирующих реальный мир. В результате, система способна эффективно функционировать даже при наличии неполной информации или в условиях неопределенности, что делает ее перспективной для широкого спектра приложений, включая робототехнику и автономную навигацию.
Внедрение модели GroundingDINO значительно повысило эффективность системы PixelNav в задаче обнаружения объектов. GroundingDINO, специализируясь на сопоставлении текстовых запросов с визуальными элементами на изображении, позволяет PixelNav более точно идентифицировать целевые объекты в сложных сценах. Этот подход обеспечивает не только обнаружение объекта, но и его точное определение в пространстве, что критически важно для успешной навигации. Улучшенная точность обнаружения, достигнутая благодаря GroundingDINO, напрямую влияет на скорость и надежность планирования маршрута, позволяя агенту эффективно ориентироваться в динамически меняющихся условиях окружающей среды и избегать ненужных повторных поисков.
Исследование, представленное в данной работе, напоминает процесс деконструкции сложной системы. Авторы не просто стремятся к эффективной навигации, но и пытаются понять, как индивидуальные привычки пользователя влияют на восприятие окружающего пространства. Подобно тому, как инженер разбирает механизм, чтобы понять принципы его работы, они анализируют паттерны поведения для улучшения алгоритмов поиска объектов. В этом контексте особенно актуальна фраза Давида Гильберта: «Мы должны знать. Мы должны знать, что мы можем знать». И действительно, понимание того, что пользователь ищет и как он это делает, открывает новые возможности для персонализированного взаимодействия с искусственным интеллектом и значительно повышает эффективность навигации в сложных средах. Учёт привычек пользователя — это не просто оптимизация, это принципиально новый подход к пониманию взаимодействия человека и машины.
Что дальше?
Представленный здесь набор данных и модуль извлечения привычек — лишь первый шаг к пониманию того, как «разумная» среда может действительно адаптироваться к своему пользователю. Реальность, как открытый исходный код, постепенно раскрывает свои алгоритмы, но пока что мы видим лишь фрагменты. Проблема не в том, чтобы научить систему ориентироваться в пространстве, а в том, чтобы она поняла, почему пользователь ищет именно этот объект, в данный момент, именно таким образом. Игнорирование контекста привычек — это как пытаться взломать систему, имея только половину ключа.
Следующим этапом представляется не просто расширение набора данных, а создание динамических моделей, способных предсказывать будущие действия пользователя на основе неполной информации. Это потребует ухода от статичного представления привычек к построению вероятностных карт поведения, учитывающих индивидуальные особенности и текущий контекст. Возникает вопрос: где граница между предсказанием и манипуляцией? И стоит ли вообще пытаться её проводить?
В конечном счёте, настоящая проверка ждёт в реальных условиях, в сложных, непредсказуемых домашних средах. Только там станет ясно, насколько эффективным является подход, основанный на пользовательских привычках, и где его возможности исчерпываются. А пока — алгоритмы продолжают «щупать» реальность, пытаясь понять, что скрывается за её кажущейся простотой.
Оригинал статьи: https://arxiv.org/pdf/2602.06459.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- СПБ Биржа: «Газпром» в фаворе, «Т-техно» под давлением, дефицит юаней тревожит инвесторов (22.03.2026 22:33)
- Макросъемка
- Российский рынок: между ставкой ЦБ, геополитикой и отчетами компаний (25.03.2026 17:32)
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Искусственные мозговые сигналы: новый горизонт интерфейсов «мозг-компьютер»
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- Motorola Edge 30 Pro ОБЗОР: скоростная съёмка видео, скоростная зарядка, беспроводная зарядка
- Cubot Note 60 ОБЗОР: плавный интерфейс, большой аккумулятор
- MINISFORUM добавляет опцию Ryzen 9 8945HX в линейку мини-ПК MS-A2
- Мозг и Искусственный Интеллект: Общая Система Координат
2026-02-09 18:03