Автор: Денис Аветисян
Как принципы воплощенного интеллекта и интеграция морфологии, материалов и взаимодействия с окружающей средой позволяют создавать автономных микророботов, снижая зависимость от централизованного управления.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"Исследование роли воплощенного интеллекта в создании продвинутых биомиметических микророботов и анализ примеров его реализации.
Традиционные подходы к управлению робототехническими системами часто подразумевают разделение сенсорики, вычислений и приводов, что ограничивает их адаптивность и эффективность в сложных условиях. В данной работе, ‘Embodied Intelligence for Advanced Bioinspired Microrobotics: Examples and Insights’, исследуется концепция воплощенного интеллекта (EI) как принципа проектирования микророботов, где морфология, материалы и взаимодействие с окружающей средой интегрируются для обеспечения автономного поведения. Показано, что совместное проектирование физической структуры и функциональности позволяет создавать роботов, демонстрирующих интеллектуальное поведение, возникающее из их динамики и взаимодействия со средой. Может ли такой подход к проектированию микророботов стать масштабируемой альтернативой классическому управлению и открыть новые возможности для биоинспирированной робототехники?
За пределами централизованного управления: ограничения традиционной робототехники
Традиционная робототехника полагается на централизованную обработку данных, что создает узкие места для сложных адаптивных моделей поведения. Это ограничивает способность роботов эффективно функционировать в непредсказуемых условиях и интегрировать сенсорные данные с моторикой в реальном времени. Разделение сенсорики, обработки и активации снижает скорость и энергоэффективность. Такая архитектура отличается от биологических систем, где эти функции интегрированы и выполняются параллельно, что затрудняет надежную локомоцию и манипуляции в динамичной среде. Как и любая система, робототехника эволюционирует, стремясь к адаптивности и эффективности, а время проверяет ее решения.
Воплощенный интеллект: новый фундамент для робототехники
Воплощенный интеллект – альтернативный подход к разработке роботов, постулирующий, что сложное поведение возникает из физического взаимодействия робота с окружающей средой. Такой подход смещает акцент с программного обеспечения на физическую реализацию, подчеркивая роль формы и материалов в способностях робота. Концепции аутопоэза и структурной связи, заимствованные из биологии, служат перспективным шаблоном для самоорганизующихся и обучающихся роботов, способных поддерживать организацию и адаптироваться без внешнего управления. Морфологическое вычисление подчеркивает роль тела робота – его материалов и геометрии – в формировании поведения, выходя за рамки чисто алгоритмического контроля.
Эхо прошлого, инновации будущего
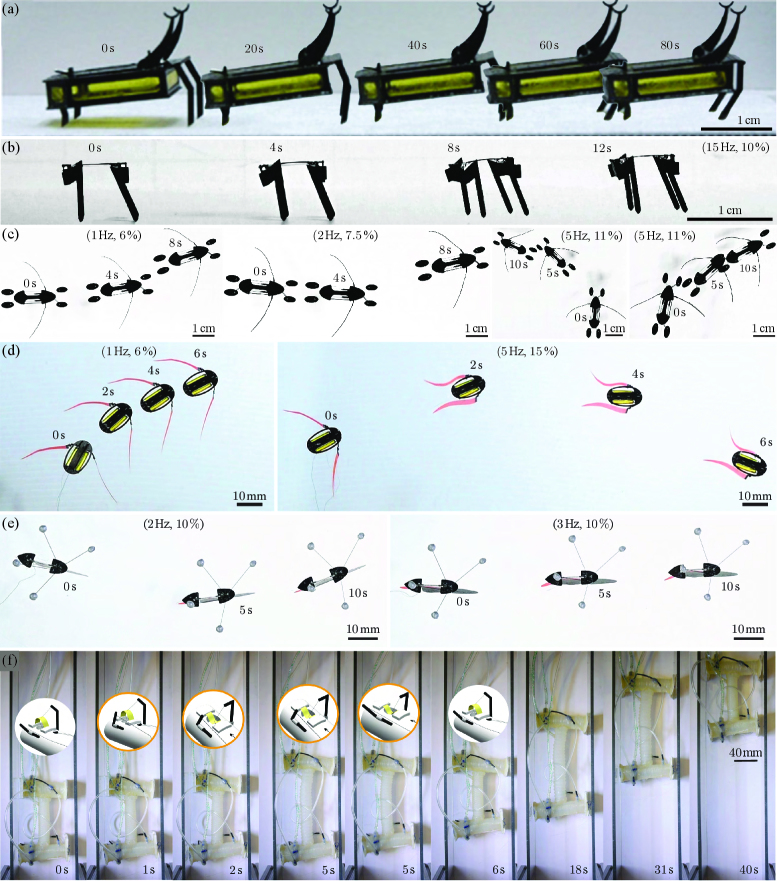
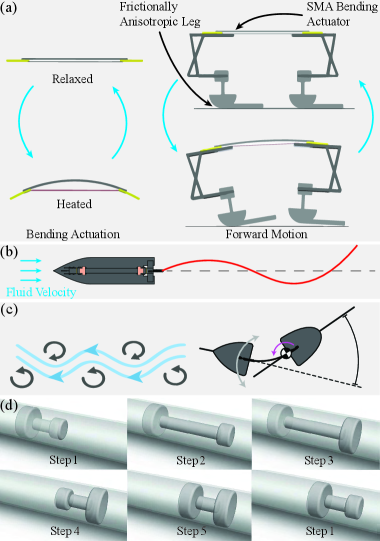
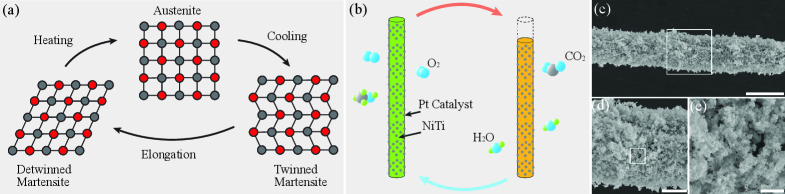
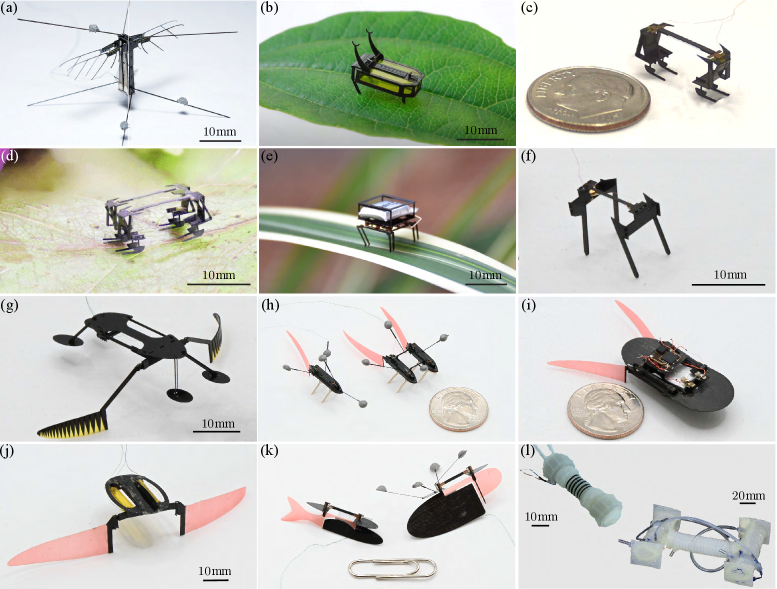
Древнейшие устройства, такие как клепсидра Ктесибия и автоматы Герона Александрийского, демонстрируют ранние реализации систем обратной связи посредством материального взаимодействия, предшествуя электронной вычислительной технике. Эти механизмы использовали физические принципы для поддержания или изменения движения, закладывая основу для более сложных систем управления. Ткацкий станок Жаккарда, объединивший механическую структуру с закодированным поведением через перфокарты, стал предшественником современных программируемых систем. Современные разработки, такие как RoBeetle, приводимый в движение каталитическим искусственным мускулом, и SMALLBug, использующий анизотропное трение, подтверждают возможность создания автономных микророботов без электронных компонентов и эффективной локомоции.
За пределами приводов: интегрированные системы и новая локомоция
Разработка микророботов демонстрирует прогресс в воплощенном интеллекте и био-вдохновленных конструкциях. Платформы, такие как Bee++, использующие наклонные плоскости для управления шестью степенями свободы, и VLEIBot, движущийся за счет волновой тяги, демонстрируют сложные стратегии локомоции. Эти системы используют различные принципы, включая жидкостно-структурное взаимодействие и нелинейные методы управления, для высокой маневренности и эффективности. BILLEBot объединяет механизмы WaterStrider с движущей силой VLEIBot, подчеркивая эффективность био-вдохновленного дизайна. Особого внимания заслуживают пневматические мягкие роботы, использующие нейроморфные механические вычисления и анизотропное трение для надежного и энергоэффективного движения. Достигнута масса всего 10 мг, что делает его самым легким роботом с бортовым приводом, а также разработан легкий автономный ползун массой 500 мг.
Будущее робототехники: воплощенная, автономная и устойчивая
Переход от централизованных вычислений к воплощенному взаимодействию открывает возможности для создания устойчивых, энергоэффективных и адаптивных роботов. Такой подход распределяет вычислительную нагрузку и снижает зависимость от единой точки отказа. Системы, подобные SMARTI, состоящие из платформ SMALLBug, демонстрируют потенциал масштабируемых и распределенных архитектур управления, повышая надежность и гибкость системы при частичном повреждении. Дальнейшие исследования в области новых материалов, био-вдохновленных конструкций и нейроморфных механических вычислений откроют новую эру робототехники, в которой машины будут бесшовно интегрироваться с естественным миром. Разработка таких технологий требует междисциплинарного подхода, объединяющего достижения материаловедения, биологии и информатики.
Исследование воплощенного интеллекта, представленное в данной работе, подчеркивает, что сложные системы не нуждаются в централизованном управлении для достижения автономности. Вместо этого, морфология, материалы и взаимодействие с окружающей средой формируют основу для самоорганизации и адаптации. В этом контексте, слова Джона фон Неймана: «В науке нет абсолютно ничего важного, что нельзя было бы выразить в немногих словах», приобретают особое значение. Подобно тому, как простота принципов лежит в основе сложных природных явлений, воплощенный интеллект стремится к элегантности и эффективности, минимизируя потребность в избыточном вычислении. Акцент на взаимодействии робота с окружающей средой, рассматриваемый в статье как ключевой элемент, демонстрирует, что система способна учиться и адаптироваться, опираясь на свои физические свойства и сенсорные данные.
Что впереди?
Представленная работа, как и любая попытка обуздать сложность, лишь обнажает горизонт нерешенных вопросов. Микророботы, вдохновленные биологическими системами, неизбежно сталкиваются с проблемой старения – не в смысле механического износа, а в изменении их адаптивных способностей в меняющейся среде. Каждый «баг» в алгоритме управления – это момент истины во временной кривой, отражение несовершенства модели по отношению к реальности. Следовательно, акцент смещается не на достижение идеального контроля, а на разработку систем, способных достойно стареть – учиться на ошибках, адаптироваться к деградации и сохранять функциональность даже в условиях неопределенности.
Особое внимание следует уделить исследованию взаимодействия робота с окружающей средой как неотъемлемой части его «интеллекта». Технический долг, накопленный в процессе разработки, – это закладка прошлого, которую придется оплачивать настоящим в виде снижения надежности или адаптивности. Вместо стремления к абсолютной точности моделирования, необходимо развивать методы, позволяющие роботу «чувствовать» среду и использовать ее для компенсации собственных недостатков.
Будущие исследования должны быть направлены на создание не просто автономных микророботов, а систем, способных к эволюции – к постепенному улучшению своих характеристик в процессе взаимодействия с миром. Иначе говоря, необходимо принять неизбежность несовершенства и научиться проектировать системы, которые не просто работают, а живут – стареют достойно, учатся на ошибках и адаптируются к изменяющимся условиям.
Оригинал статьи: https://arxiv.org/pdf/2510.26132.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Рынок в ожидании ставки: что ждет рубль, нефть и акции? (20.03.2026 01:32)
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Искусственные мозговые сигналы: новый горизонт интерфейсов «мозг-компьютер»
- СПБ Биржа: «Газпром» в фаворе, «Т-техно» под давлением, дефицит юаней тревожит инвесторов (22.03.2026 22:33)
- Макросъемка
- Cubot Note 60 ОБЗОР: плавный интерфейс, большой аккумулятор
- Космос в деталях: Навигация по астрономическим данным на иммерсивных дисплеях
- vivo S50 Pro mini ОБЗОР: объёмный накопитель, портретная/зум камера, большой аккумулятор
- MINISFORUM добавляет опцию Ryzen 9 8945HX в линейку мини-ПК MS-A2
- Российский рынок: между ростом потребления газа, неопределенностью ФРС и лидерством «РусГидро» (24.12.2025 02:32)
2025-11-02 00:00