Автор: Денис Аветисян
Исследователи представили MyoInteract — платформу, ускоряющую создание и оценку биомеханических симуляций для разработки человеко-машинных интерфейсов.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
MyoInteract — это GPU-ускоренный фреймворк с удобным графическим интерфейсом для быстрого прототипирования и исследования биомеханических задач в HCI.
Несмотря на потенциал биомеханических симуляций, основанных на обучении с подкреплением, для революционизации исследований в области взаимодействия человека и компьютера, их практическое применение затруднено сложностью и трудоемкостью настройки. В данной работе представлена система ‘MyoInteract: A Framework for Fast Prototyping of Biomechanical HCI Tasks using Reinforcement Learning’, предлагающая новый подход к быстрому прототипированию биомеханических задач за счет удобного графического интерфейса и значительного ускорения обучения — до 98%. Разработанный фреймворк позволяет даже начинающим исследователям эффективно настраивать, обучать и оценивать модели движений человека, снижая порог входа в данную область. Сможет ли MyoInteract существенно ускорить цикл итераций и открыть новые горизонты в биомеханических исследованиях взаимодействия человека и компьютера?
Вызов Реалистичного Моделирования Человека
Создание реалистичных симуляций человеческого взаимодействия представляет собой значительную вычислительную задачу, требующую огромных ресурсов и времени. Это связано с необходимостью точного моделирования сложной динамики человеческого тела, включая костно-мышечную систему, суставы и взаимодействие с окружающей средой. Каждый аспект — от физиологически правдоподобных движений до нюансов выражения эмоций — требует сложных алгоритмов и значительной вычислительной мощности. В результате, процесс создания и отладки таких симуляций существенно замедляется, что затрудняет быструю итерацию в процессе прототипирования человеко-машинного взаимодействия (HCI). Это особенно критично для разработчиков, стремящихся оперативно оценивать различные варианты дизайна и получать обратную связь от пользователей, поскольку длительное время разработки симуляций может существенно увеличить общие сроки проекта и снизить его эффективность.
Традиционные методы биомеханического моделирования, объединенные с обучением с подкреплением, часто сталкиваются с существенными трудностями в плане времени обучения и масштабируемости. В процессе симуляции сложных движений человека, необходимо учитывать множество факторов, включая анатомию, физиологию и динамику, что требует огромных вычислительных ресурсов. Обучение с подкреплением, в свою очередь, предполагает множество итераций для достижения оптимального поведения, что еще больше увеличивает время, необходимое для получения реалистичных результатов. В результате, создание моделей, способных эффективно имитировать широкий спектр человеческих действий, становится крайне ресурсоемкой задачей, ограничивая возможности быстрого прототипирования и исследования в области взаимодействия человека и компьютера. Проблема масштабируемости усугубляется, когда требуется симулировать большое количество агентов или сложные сценарии, что требует еще более мощных вычислительных ресурсов и оптимизированных алгоритмов.
Существующие методы моделирования человеческого движения сталкиваются с серьезной проблемой: достижение баланса между физической достоверностью симуляции и необходимой скоростью вычислений для оперативного проектирования и тестирования взаимодействий. Чрезмерная детализация физической модели, включающая сложные расчеты мускулатуры, суставов и динамики тканей, значительно увеличивает вычислительные затраты, делая итеративные эксперименты с различными вариантами дизайна практически невозможными. В то же время, упрощение модели для повышения скорости приводит к потере реалистичности, что негативно сказывается на валидности результатов и может привести к неоптимальным решениям в проектировании человеко-машинных интерфейсов. Таким образом, исследователи постоянно ищут компромиссные решения, позволяющие сохранить достаточно высокую степень реализма, не жертвуя при этом скоростью и эффективностью процесса разработки.
MyoInteract: Ускоренная Платформа Симуляций
MyoInteract использует возможности GPU-ускорения для существенного снижения вычислительной нагрузки при проведении биомеханических симуляций. Традиционные методы моделирования сложных взаимодействий в биологических системах требуют значительных ресурсов центрального процессора (CPU), что ограничивает скорость и масштаб проводимых исследований. Перенос вычислительно-интенсивных задач, таких как расчет сил, моментов и динамики тел, на графические процессоры (GPU) позволяет добиться параллельной обработки данных и значительно ускорить симуляции. В MyoInteract это достигается за счет реализации ключевых алгоритмов на языке CUDA, что обеспечивает эффективное использование архитектуры GPU и позволяет моделировать более сложные и реалистичные сценарии взаимодействия с большей частотой кадров и меньшими временными затратами.
В основе MyoInteract лежит принцип декомпозиции задач, заключающийся в разбиении сложных сценариев взаимодействия на управляемые, повторно используемые примитивы. Этот подход позволяет абстрагироваться от детализации конкретных взаимодействий, представляя их в виде базовых строительных блоков, таких как контакт между двумя поверхностями или приложение силы к объекту. Каждый примитив инкапсулирует определенную функциональность и может быть многократно использован в различных симуляциях, значительно сокращая время разработки и обеспечивая модульность системы. Декомпозиция позволяет эффективно управлять сложностью симуляций, упрощая отладку и внесение изменений, а также облегчая масштабирование для решения более сложных задач.
В основе MyoInteract лежит физический движок MuJoCo, обеспечивающий реалистичную симуляцию динамики тел и взаимодействий. Для управления агентами и оптимизации их поведения используется алгоритм обучения с подкреплением PPO (Proximal Policy Optimization). PPO позволяет эффективно исследовать пространство стратегий, минимизируя риск резких изменений в политике и обеспечивая стабильное обучение даже в сложных сценариях. Комбинация MuJoCo и PPO гарантирует надежный и эффективный контроль симуляции, что критически важно для итеративной разработки и анализа биомеханических систем.
Ускорение процессов моделирования в MyoInteract позволяет существенно сократить время, необходимое для проведения экспериментов и итеративной доработки конструкторских решений. Благодаря оптимизации рабочих процессов, исследователи и инженеры могут быстрее оценивать различные варианты дизайна и алгоритмов управления, проводить больше тестов и, как следствие, значительно повысить эффективность разработки. Сокращение времени итерации позволяет оперативно вносить изменения и улучшения в модели, обеспечивая более точную настройку и оптимизацию производительности систем взаимодействия человек-машина.
Проверка: Реалистичные Движения и Сокращенное Время Обучения
Тщательное тестирование продемонстрировало, что MyoInteract обеспечивает значительное сокращение времени обучения для биомеханических симуляций, что ускоряет циклы прототипирования. В сравнении с передовыми методами, время обучения сокращается на 98%. Это достигается за счет оптимизации алгоритмов и эффективной реализации, позволяющих быстрее достигать сходимости модели и получать достоверные результаты симуляций, критичные для разработки и тестирования интерактивных систем.
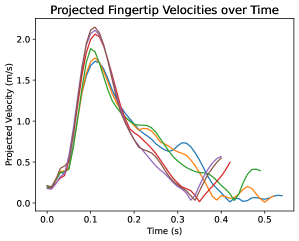
Симулированные движения пользователя в MyoInteract соответствуют установленным принципам, таким как закон Фиттса, что подтверждается коэффициентом детерминации R^2 = 0.90 при валидации. Данный показатель указывает на высокую степень соответствия между предсказанными и фактическими траекториями движения, обеспечивая точное моделирование поведения пользователя в различных интерактивных сценариях. Высокое значение R^2 свидетельствует о надежности предсказаний MyoInteract относительно времени, необходимого для выполнения определенных действий, и, следовательно, о возможности использования системы для эффективного анализа и оптимизации пользовательского опыта.
Валидация фреймворка MyoInteract проводилась на различных сценариях взаимодействия, включая AR-взаимодействие, взаимодействие с публичными дисплеями и ввод текста на мобильных клавиатурах. Результаты показали, что время обучения модели MyoInteract составило 36 минут, в то время как для метода UitB потребовалось 6.9 часов. Это демонстрирует примерно 40-кратное ускорение процесса обучения, подтверждая эффективность MyoInteract в моделировании движений человека в различных контекстах.
Метод UitB требовал 6,9 часов для обучения модели, в то время как MyoInteract значительно сократил это время до 36 минут. Данное снижение времени обучения демонстрирует существенное ускорение процесса, позволяя быстрее создавать и тестировать прототипы биомеханических симуляций. Разница во времени обучения составляет примерно 40-кратное увеличение производительности, что делает MyoInteract более эффективным инструментом для разработки и исследования взаимодействия человека с компьютером.
Влияние и Перспективы Развития
MyoInteract представляет собой мощный инструмент, предоставляющий исследователям и разработчикам в области взаимодействия человека и компьютера (HCI) возможность оперативно создавать прототипы и оценивать новые методы взаимодействия. Система позволяет быстро моделировать сложные сценарии, имитируя физиологические аспекты движений человека, что значительно ускоряет процесс итеративной разработки. Благодаря этому, специалисты могут тестировать различные концепции взаимодействия, оценивать их эффективность и удобство использования, не прибегая к дорогостоящим физическим прототипам или длительным пользовательским исследованиям. Фактически, MyoInteract предоставляет виртуальную лабораторию для экспериментов, позволяя значительно сократить время и ресурсы, необходимые для создания инновационных и интуитивно понятных интерфейсов.
Архитектура MyoInteract разработана с учетом принципов модульности и расширяемости, что позволяет легко интегрировать её с различными инструментами моделирования и наборами данных. Такая конструкция обеспечивает гибкость в применении, давая возможность исследователям и разработчикам адаптировать систему под конкретные задачи и расширять её функциональность, используя существующие или разрабатываемые ими собственные компоненты. Например, данные, полученные из других симуляций движения или из реальных измерений мышечной активности, могут быть легко включены в MyoInteract для более точной и реалистичной оценки новых методов взаимодействия. Это открывает широкие возможности для комбинирования различных подходов и создания комплексных систем, позволяющих проводить всесторонний анализ и оптимизацию пользовательского опыта.
В дальнейшем планируется расширение библиотеки базовых действий и включение более сложных биомеханических моделей, таких как Hill-type Muscle Model. Данный подход позволит создать более реалистичные симуляции человеческих движений, учитывая нелинейные свойства мышц и их влияние на динамику взаимодействия. Разработка и интеграция подобных моделей откроет возможности для анализа и оптимизации сложных задач, требующих высокой точности и согласованности движений, например, в области протезирования или виртуальной реальности. Внедрение Hill-модели позволит не только точнее воспроизводить физиологические процессы, но и предсказывать утомляемость и другие факторы, влияющие на эффективность взаимодействия человека с компьютером.
Разработка MyoInteract открывает новые возможности для значительного ускорения процесса создания более интуитивно понятных и эффективных человеко-компьютерных интерфейсов. Благодаря возможности быстрого прототипирования и оценки новых методов взаимодействия, исследователи и дизайнеры получают мощный инструмент для оптимизации пользовательского опыта. Повышенная скорость разработки позволит быстрее внедрять инновационные решения, адаптированные к естественным движениям и потребностям человека, что, в свою очередь, может привести к более продуктивной и комфортной работе с цифровыми технологиями. Ускорение цикла разработки и тестирования позволяет не только улучшить существующие интерфейсы, но и создать принципиально новые, ориентированные на максимальную эффективность и удобство использования.
Представленная работа демонстрирует стремление к созданию систем, способных адаптироваться к естественному течению времени и сложности задач. MyoInteract, ускоряя прототипирование биомеханических взаимодействий, позволяет исследователям не форсировать процесс, а наблюдать за развитием систем взаимодействия человека и компьютера. Это соответствует идее о том, что мудрые системы не борются с энтропией, а учатся дышать вместе с ней. Как отмечал Андрей Колмогоров: «Математика — это искусство находить закономерности в хаосе». Подобно этому, MyoInteract предлагает инструменты для выявления закономерностей в сложных биомеханических процессах, позволяя создавать более эффективные и естественные интерфейсы.
Куда Ведет Дорога?
Представленная работа, подобно любому инструменту, лишь временно облегчает бремя познания. Ускорение прототипирования биомеханических моделей взаимодействия человек-компьютер — это, безусловно, достижение, но оно лишь отодвигает неизбежный вопрос о валидности этих моделей. Логирование, эта хроника жизни системы, фиксирует поведение, но не объясняет его причин. Вопрос не в скорости симуляции, а в адекватности ее представления реальности. Недостаточно создать «быстрый» суррогат пользователя; необходимо понимать, какие упрощения неизбежно вносят искажения в результаты.
Особый интерес представляет дальнейшее развитие функций вознаграждения. Создание оптимальной функции — это искусство, а не наука. Развертывание новой модели — лишь мгновение на оси времени, но ее влияние на последующие исследования может быть долговременным. Необходимо исследовать методы автоматического построения и верификации функций вознаграждения, учитывающих сложность и вариативность человеческого мотора. В противном случае, ускорение прототипирования обернется ускорением распространения ошибочных выводов.
И, наконец, стоит задуматься о масштабируемости. Предложенный фреймворк, несомненно, полезен для исследования отдельных задач. Но каковы его пределы? Сможет ли он справиться с моделированием сложных, многокомпонентных систем, включающих взаимодействие множества пользователей и устройств? Все системы стареют — вопрос лишь в том, делают ли они это достойно. И, возможно, истинная ценность MyoInteract заключается не в скорости, а в способности стимулировать дальнейшие исследования в области биомеханического взаимодействия.
Оригинал статьи: https://arxiv.org/pdf/2602.15245.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Лучшие смартфоны. Что купить в апреле 2026.
- Что такое ISO в фотоаппарате
- Технологии и вера: новый взгляд на инклюзивный дизайн
- Рекомендации нового поколения: объединяя визуальное и текстовое
- Infinix Note 40 Pro+ выставлен на обзор
2026-02-18 14:06