Автор: Денис Аветисян
Исследователи создали нейронную сеть, управляющую виртуальной мухой, используя в качестве основы карту связей мозга настоящего насекомого.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"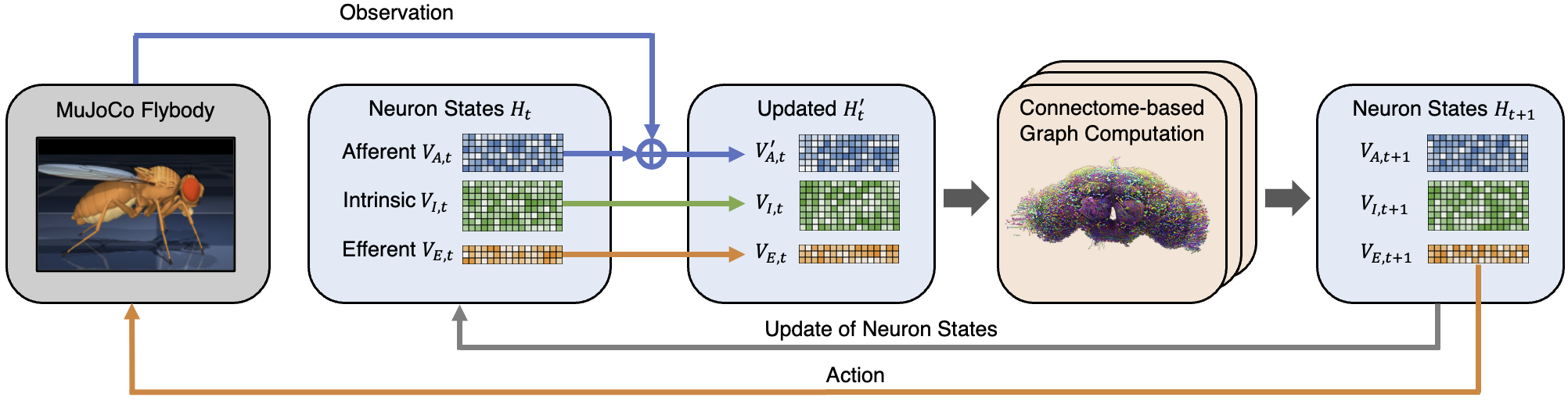
Модель графа связей мозга Drosophila позволила создать эффективный контроллер для симуляции локомоции, демонстрируя потенциал биологических схем в качестве индуктивных предубеждений для искусственного интеллекта.
Несмотря на очевидную способность биологических нейронных сетей к обучению и управлению сложными движениями, использование полных карт связей мозга (коннектомов) в качестве контроллеров в обучении с подкреплением остается неисследованным направлением. В работе ‘Whole-Brain Connectomic Graph Model Enables Whole-Body Locomotion Control in Fruit Fly’ представлен новый подход, использующий точную нейронную архитектуру мозга плодовой мушки для управления ее движениями. Разработанная модель FlyGM, основанная на графовом представлении коннектома, демонстрирует стабильный контроль локомоции в различных задачах без специфической настройки архитектуры. Может ли прямое использование биологических схем связей мозга стать эффективным индуктивным смещением для разработки искусственного интеллекта, способного к обучению сложным двигательным навыкам?
Нейронные сети как пророчество движения: раскрывая тайны поведения
Понимание поведения животных неразрывно связано с детальным изучением нейронных цепей, которые им управляют. Сложные поведенческие паттерны — от простых рефлексов до сложного социального взаимодействия — являются результатом скоординированной активности миллиардов нейронов, связанных друг с другом в сложные сети. Изучение этих сетей, известное как коннектомика, позволяет выявить, какие нейроны активируются в ответ на определенные стимулы, как информация обрабатывается и передается, и какие конкретные нейронные цепи отвечают за конкретные поведенческие реакции. Без понимания этой нейронной архитектуры, попытки объяснить или предсказать поведение животных остаются неполными и поверхностными, подобно попытке понять работу компьютера, не зная его внутренней схемы. В связи с этим, построение полных карт нейронных связей становится ключевой задачей для современной нейробиологии и зоологии.
Традиционное биомеханическое моделирование, несмотря на свою полезность в понимании движения и структуры, зачастую оказывается недостаточно детализированным для реалистичного воспроизведения поведения. Это связано с тем, что такие модели в основном фокусируются на физических свойствах тела — мышцах, костях, суставах — и упускают из виду ключевую роль нервной системы в управлении этими процессами. Отсутствие учета нейронных связей и схем обработки информации ограничивает способность этих моделей предсказывать сложное поведение, особенно в ситуациях, требующих адаптации и обучения. В результате, даже самые сложные биомеханические симуляции могут выглядеть неестественно или неправдоподобно, поскольку не отражают тонкую координацию, обеспечиваемую нервной системой, и не способны воспроизвести нюансы, возникающие из-за обработки сенсорной информации и принятия решений.
Целомозгновая коннектомика представляет собой мощную основу для выявления нейронных связей, однако для полноценного понимания и моделирования поведения организмов требуется перевод этих данных в вычислительные модели. Недостаточно просто зафиксировать анатомическую карту мозга; необходимо создать алгоритмы и симуляции, способные воспроизвести динамику нейронных сигналов и предсказать реакцию животного на различные стимулы. Такой подход позволит перейти от статических схем связей к функционирующим моделям, демонстрирующим, как информация обрабатывается и передается в мозге, открывая возможности для глубокого изучения поведения и разработки новых методов лечения неврологических расстройств. Успешная трансляция коннектомических данных в вычислительные модели станет ключевым шагом к созданию реалистичных симуляций мозга и пониманию фундаментальных принципов работы нервной системы.
FlyGM: симуляция, ограниченная коннектомом — новая архитектура управления
FlyGM — это среда симуляции, разработанная на базе физического движка Flybody. Flybody обеспечивает реалистичную физическую модель, включая динамику тел и взаимодействия с окружающей средой. FlyGM использует эту основу для создания виртуальной среды, предназначенной для моделирования поведения, управляемого нервной системой. В отличие от традиционных симуляций, основанных на заранее запрограммированных алгоритмах, FlyGM позволяет исследовать поведение, возникающее из взаимодействия физической модели и архитектуры нервной системы, что открывает возможности для изучения принципов управления движением и адаптации в сложных условиях.
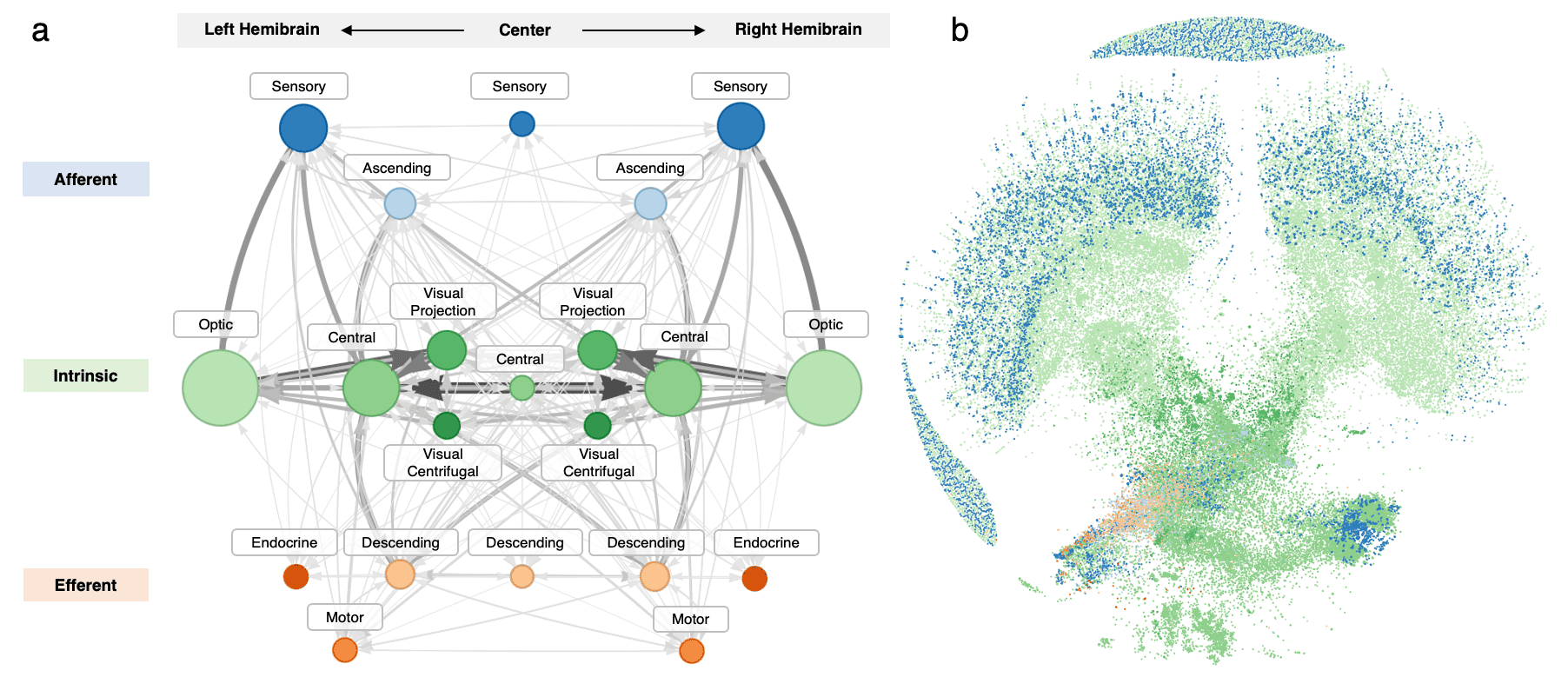
Система FlyGM использует полный коннектом Drosophila melanogaster в качестве основы своей архитектуры управления. Это означает, что поведение симуляции не задается вручную, а возникает из динамики связей между нейронами, определенных в коннектоме. Все 864 нейрона и более 500 000 синаптических связей, составляющих коннектом, непосредственно определяют выходные сигналы, управляющие виртуальным телом симуляции. Такой подход позволяет моделировать локомоцию, опираясь на биологически правдоподобную структуру нервной системы, а не на заранее запрограммированные алгоритмы.
Модель, основанная на полном коннектоме Drosophila, позволяет симулировать локомоцию не посредством заранее запрограммированных последовательностей действий, а за счет динамики нейронных связей. Вместо использования жестко заданных алгоритмов управления движением, FlyGM моделирует активность нейронов и распространение сигналов между ними, определяя поведение виртуального организма. Это означает, что каждое движение является результатом сложного взаимодействия между нейронными узлами, а не заранее определенной программы, что обеспечивает более реалистичное и адаптивное поведение симуляции.
Результаты моделирования демонстрируют, что FlyGM превосходит базовые модели с случайными и перестроенными графами связей по показателям эффективности обучения (sample efficiency) и снижению потерь (loss) при обучении с подражанием. Это указывает на то, что использование полного коннектома Drosophila в архитектуре управления обеспечивает более сильный индуктивный уклон, позволяя модели быстрее и эффективнее осваивать задачи локомоции по сравнению с моделями, лишенными такой структурированной информации о нейронных связях. Преимущество FlyGM подтверждает гипотезу о том, что топология нейронной сети играет ключевую роль в формировании эффективных стратегий управления движением.
Эмерджентная локомоция: симуляция триподиального шага как проявление архитектуры
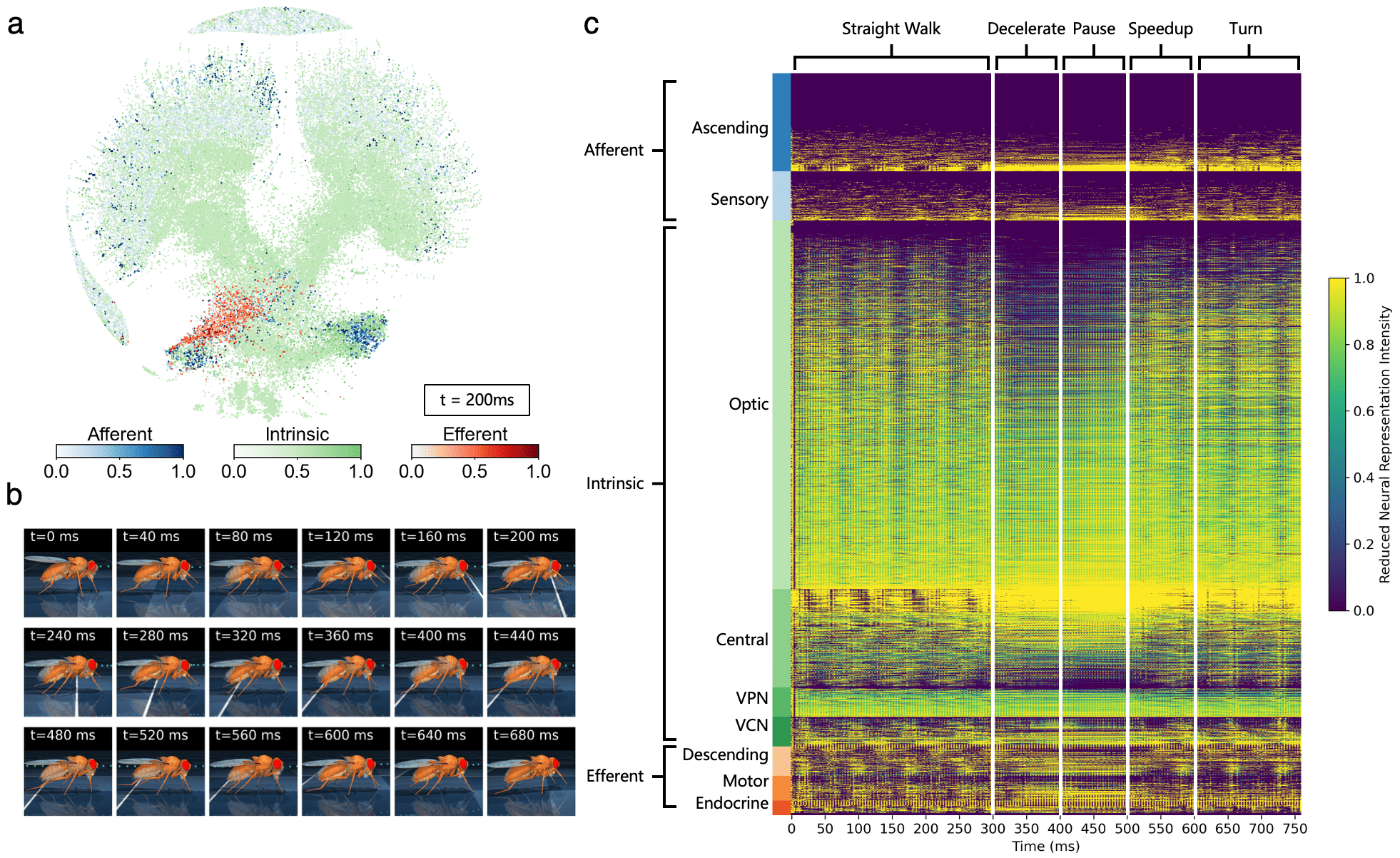
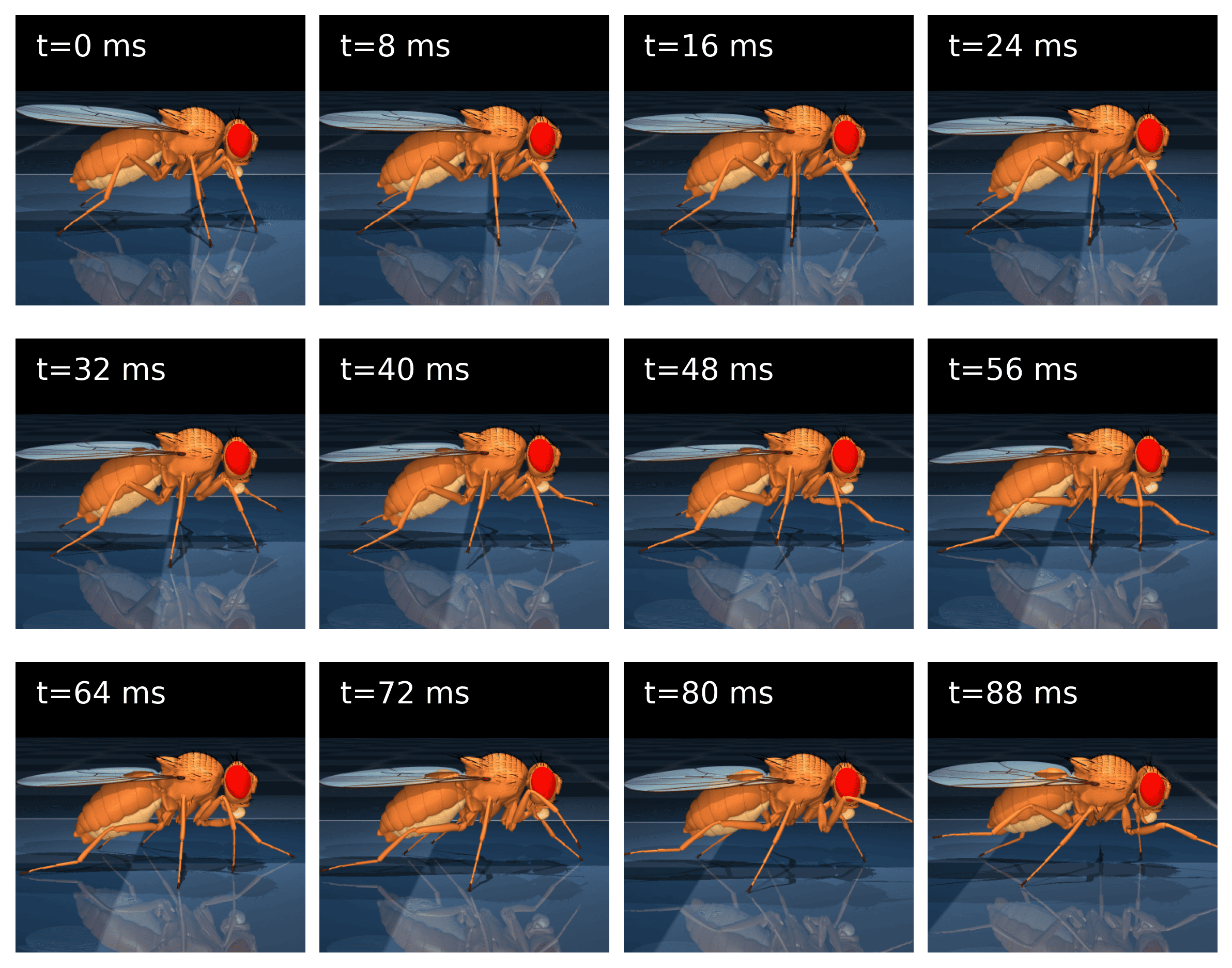
Моделирование с использованием FlyGM достоверно воспроизводит характерную для Drosophila триподиальную походку. Симуляции демонстрируют согласованность паттернов активации исполнительных механизмов и углов суставов, что соответствует наблюдаемым биологическим паттернам ходьбы мух-дрозофил. В частности, FlyGM успешно имитирует скоординированные движения трех конечностей, обеспечивающие стабильность и эффективность при передвижении, подтверждая соответствие модели реальной биомеханике насекомых.
Характерная для Drosophila триподиальная походка возникает непосредственно из взаимодействий внутри модели, ограниченной коннектомом, без какого-либо явного программирования. Это означает, что модель FlyGM не содержит заранее определенных алгоритмов управления походкой. Вместо этого, ритмичная и скоординированная активность наблюдается как результат динамического взаимодействия между нейронами и мускулами, определенного структурой коннектома и физическими ограничениями модели. Поведение конечностей возникает как эмерджентное свойство системы, а не как результат заранее заданных инструкций. Такой подход позволяет модели демонстрировать адаптивное поведение и реагировать на изменения в окружающей среде, не требуя ручной настройки параметров управления.
В качестве базового движка физического моделирования в FlyGM используется MuJoCo, что обеспечивает высокую точность биомеханической симуляции. MuJoCo отличается продвинутыми алгоритмами решения задач динамики и кинематики, позволяющими реалистично моделировать сложные взаимодействия между телом робота и окружающей средой. Это включает в себя точное вычисление сил и моментов, действующих на суставы и звенья, а также учет трения, инерции и других физических параметров. Применение MuJoCo позволяет создавать виртуальные модели, максимально приближенные к реальным системам, что критически важно для анализа и оптимизации стратегий управления движением, в частности, для воспроизведения сложных паттернов локомоции, таких как триподиальная походка Drosophila.
В условиях значительных угловых возмущений (high-yaw), модель FlyGM демонстрирует ошибку угла в 8.29 рад/с. Этот показатель существенно превосходит результаты, полученные для модели с сохранением степени связности (degree-preserving rewired graph), где ошибка составляет 13.55 рад/с, и для случайной графовой модели (random graph), где зафиксирована ошибка в 125.36 рад/с. Данные результаты свидетельствуют о превосходстве FlyGM в поддержании стабильности и точности движения при сложных внешних воздействиях.
Симуляции показали, что наблюдаемый ритмичный и скоординированный триподный шаг демонстрирует синхронизацию между активацией приводов и углами суставов, что соответствует биологическим паттернам ходьбы Drosophila. В частности, временная корреляция между сигналами активации мышц-приводов и фазами движения суставов ног подтверждает соответствие с реальным механизмом координации движений у мух. Анализ показывает, что активация приводов происходит в определенной последовательности, обеспечивающей стабильность и эффективность передвижения, что согласуется с электрофизиологическими данными, полученными при изучении нервной системы Drosophila во время ходьбы.
Исследование демонстрирует, что даже относительно простая нервная сеть, построенная на основе фактической карты связей мозга плодовой мушки, способна управлять сложным процессом — локомоцией. Этот подход, где архитектура сети диктуется биологической реальностью, а не проектируется абстрактно, вызывает интерес. Как отмечал Джон Маккарти: «Всякий интеллект — это способность находить и применять подходящие абстракции». В данном случае, connectome выступает как та самая абстракция, оказывающая сильное влияние на поведение, и это подтверждает, что биологические структуры могут служить мощными априорными знаниями для искусственного интеллекта. Словно выращивание системы, а не её конструирование, и каждый выбор архитектуры — это пророчество о будущем успехе.
Что дальше?
Представленная работа, безусловно, расширяет горизонты понимания связи между структурой нервной системы и возможностями управления поведением. Однако, масштабность — это иллюзия. Возможность управления локомоцией виртуальной мушки — лишь первый шаг. Истинная сложность кроется не в увеличении числа синапсов, а в понимании динамики их взаимодействия, в тех эфемерных изменениях, что определяют обучение и адаптацию. Масштабируемость — всего лишь слово, которым мы оправдываем усложнение.
Предположение о том, что «проводка» мозга может служить сильным индуктивным смещением для искусственного интеллекта, звучит заманчиво, но легко забывается, что каждая архитектурная деталь — это пророчество о будущей ошибке. Совершенная архитектура — миф, необходимый, чтобы мы не сошли с ума, но стремление к ней парализует гибкость. Всё, что оптимизировано, однажды потеряет свою адаптивность.
Будущие исследования, вероятно, столкнутся с необходимостью преодоления разрыва между упрощенными моделями коннектома и реальной нейронной сетью, с учетом пластичности, гетерогенности и нелинейности. Симуляция — лишь бледная тень жизни. Истинный прогресс лежит не в создании более точных карт, а в понимании принципов самоорганизации, лежащих в основе интеллекта — в той самой экосистеме, которую мы тщетно пытаемся построить.
Оригинал статьи: https://arxiv.org/pdf/2602.17997.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок в зоне турбулентности: рубль, ставки и новые риски (10.04.2026 01:32)
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Canon EOS 80D
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
- Honor X80i ОБЗОР: плавный интерфейс, большой аккумулятор, объёмный накопитель
- Как использовать режимы съёмки P, S, A, M на фотоаппарате?
- IdeaPad Slim 3 15IRH10R ОБЗОР
- Proton только что запустил альтернативу Google Workspace и Microsoft 365, ориентированную на конфиденциальность.
2026-02-24 04:43