Автор: Денис Аветисян
Исследование демонстрирует возможность создания точной и надежной системы отслеживания положения головы для нейронавигации, использующей стандартное оборудование и современные методы компьютерного зрения.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Оценка точности и применимости методов бесконтактного отслеживания головы на основе компьютерного зрения для нейрохирургических применений.
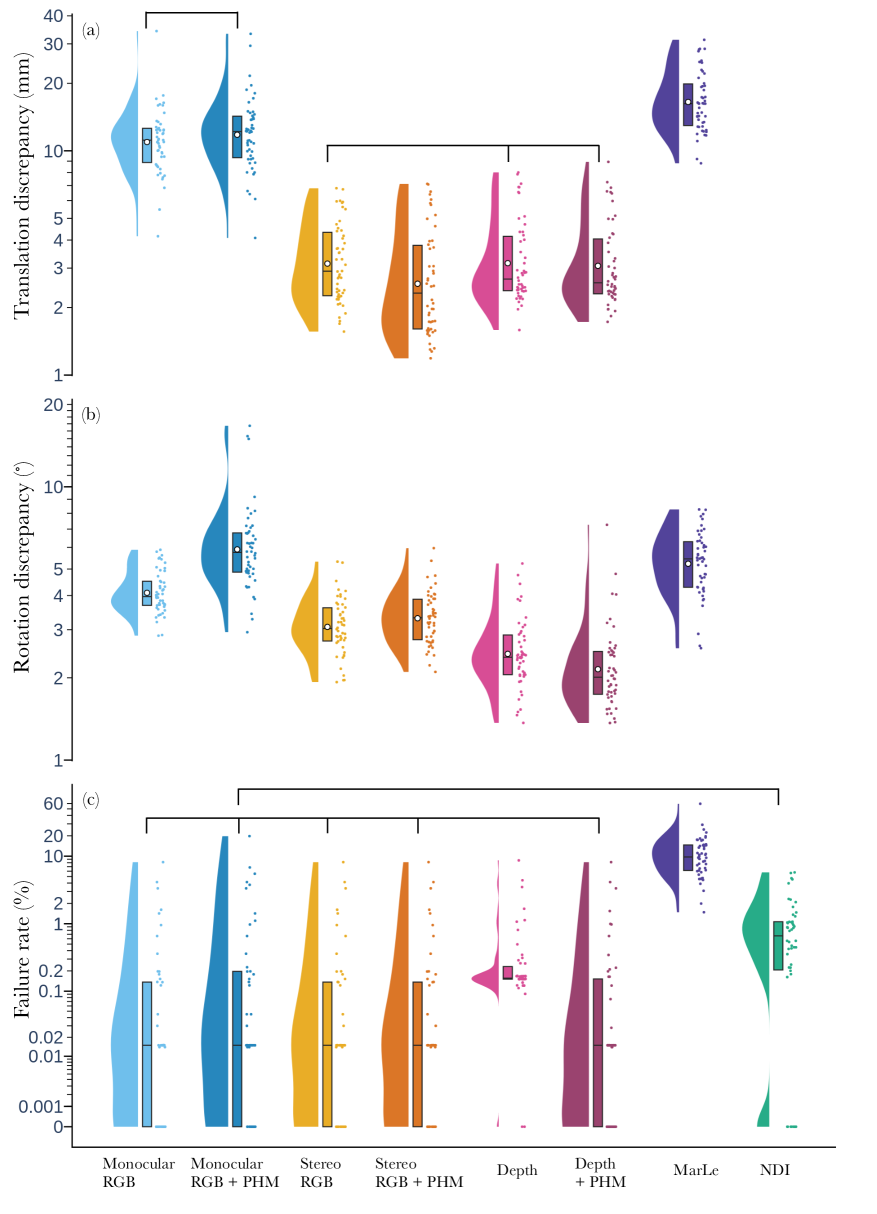
Несмотря на широкое применение навигационных систем в нейрохирургии и стимуляции мозга, традиционные подходы требуют использования громоздких маркеров, подверженных смещению и вызывающих дискомфорт у пациентов. В статье ‘Toward Accurate and Accessible Markerless Neuronavigation’ представлен новый подход, заменяющий аппаратные маркеры доступными камерами видимого и инфракрасного спектра в сочетании с алгоритмическим моделированием геометрии лица. Полученные результаты, подтвержденные на 50 добровольцах, демонстрируют медианное отклонение в пределах 2.32 мм и 2.01° по сравнению с традиционными системами, что обеспечивает достаточную точность для транскраниальной магнитной стимуляции. Может ли дальнейшая оптимизация алгоритмов и интеграция данных с различных сенсоров открыть путь к более широкому внедрению доступной и удобной нейронавигации в клинической практике и научных исследованиях?
Преодолевая Ограничения Традиционного Отслеживания Положения Головы
Традиционные системы отслеживания положения головы, использующие маркеры, такие как NDI Polaris Vicra, обеспечивают высокую точность определения ориентации и положения в пространстве. Однако, практическое применение этих систем ограничено их жесткой настройкой и интрузивностью. Необходимость установки специальных датчиков и ношения пользователем маркеров существенно снижает естественность взаимодействия и ограничивает свободу движений. Эта сложность особенно заметна в сценариях, требующих динамичного и не ограниченного передвижения, таких как виртуальная реальность, где пользователь должен ощущать полную свободу, или в медицинских приложениях, где важно минимизировать вмешательство в процесс наблюдения.
Бесшахматное отслеживание положения головы представляет собой привлекательную альтернативу традиционным системам, использующим физические маркеры, однако сталкивается со значительными трудностями в обеспечении высокой точности и стабильности работы. В отличие от систем с маркерами, где положение головы определяется на основе известных ориентиров, бесшахматные методы полагаются на анализ изображения или данных с датчиков, что делает их более восприимчивыми к изменениям освещения, окклюзиям и индивидуальным особенностям лица. Достижение надежной работы в реальных условиях требует разработки сложных алгоритмов, способных эффективно обрабатывать шум и неопределенность, а также учитывать динамические изменения формы головы и выражения лица. Несмотря на эти трудности, непрерывные исследования и разработки в области компьютерного зрения и машинного обучения позволяют постепенно повышать точность и надежность бесшахматного отслеживания, открывая новые возможности для широкого спектра приложений.
Разработка надежных методов отслеживания положения головы без использования маркеров имеет решающее значение для широкого спектра современных приложений. В виртуальной и дополненной реальности (VR/AR) точное и непрерывное отслеживание головы позволяет пользователю естественно взаимодействовать с цифровым окружением, создавая эффект полного погружения. В сфере взаимодействия человека и компьютера (HCI) подобная технология открывает возможности для интуитивного управления и более естественного общения с системами. В медицинской визуализации, особенно в хирургических симуляциях и навигации, точное отслеживание положения головы пациента или хирурга жизненно необходимо для обеспечения безопасности и эффективности процедур, позволяя осуществлять неинвазивные вмешательства с высокой точностью и в условиях полной свободы движений.
Модальности Сенсоров для Бесшахматного Отслеживания
Монокулярные RGB-камеры представляют собой экономичное решение для отслеживания без маркеров, основанное на обнаружении двумерных (2D) ключевых точек лица для определения трехмерной (3D) позы. Однако, точность определения позы при использовании монокулярных систем напрямую зависит от условий освещения и может значительно снижаться при изменении яркости или возникновении теней. Кроме того, перекрытия (окклюзии) части лица, например, рукой или другим объектом, приводят к потере ключевых точек и, как следствие, к ошибкам в оценке 3D-позы. В связи с этим, алгоритмы, использующие монокулярные камеры, часто требуют дополнительных механизмов для компенсации влияния этих факторов, таких как фильтрация или использование контекстной информации.
Стерео RGB системы повышают точность отслеживания за счет захвата информации о глубине посредством бинокулярного зрения, имитирующего человеческое зрение. Использование двух камер, расположенных на некотором расстоянии друг от друга, позволяет вычислять глубину объектов в сцене на основе параллакса — разницы в положении объекта на изображениях, полученных каждой камерой. Это значительно улучшает процесс 3D реконструкции, предоставляя более надежные данные для определения положения и ориентации объектов, а также повышает точность обнаружения ключевых точек (landmarks) на лице, что критически важно для отслеживания движения головы и выражения лица.
RGB-D сенсоры, включающие в себя как RGB-камеру, так и датчик глубины, обеспечивают непосредственное получение информации о цвете и расстоянии до объектов в сцене. Это позволяет значительно упростить процесс 3D-реконструкции по сравнению с системами, использующими только RGB-камеры, поскольку глубина предоставляет третью координату для каждой точки. Датчики глубины, используемые в RGB-D сенсорах, функционируют на различных принципах, включая структурированный свет, времяпролёт (Time-of-Flight), и флуоресцентные методы, каждый из которых имеет свои преимущества и недостатки в отношении точности, дальности и устойчивости к внешним факторам.
Вне зависимости от используемой модальности отслеживания — монокулярные RGB-камеры, стереосистемы или RGB-D-сенсоры — ключевым этапом оценки позы головы является точное обнаружение лицевых ориентиров (facial landmarks). Эти ориентиры, представляющие собой характерные точки на лице, такие как уголки глаз, кончик носа и углы рта, используются для определения положения и ориентации головы в пространстве. Алгоритмы отслеживания, применяемые в данных системах, строятся вокруг надежного и точного определения координат этих ориентиров, поскольку ошибки в их определении напрямую влияют на точность оценки позы головы. Различные методы обнаружения лицевых ориентиров, включая алгоритмы машинного обучения и компьютерного зрения, применяются для обеспечения устойчивости и надежности процесса отслеживания.
Конструирование и Валидация Персонализированных Головных Моделей
Персонализированная головная модель (PHM) конструируется на базе 3D-морфной модели, которая служит основой для индивидуальной адаптации. Данная адаптация осуществляется с использованием данных, полученных от выбранного сенсорного устройства (например, RGB-D камеры или стереокамеры). Процесс включает деформацию базовой морфной модели для точного соответствия анатомическим особенностям конкретного субъекта, что позволяет создать реалистичное и индивидуализированное представление головы, необходимое для последующего трекинга и навигации.
Точность Персонализированной Головной Модели (PHM) является критически важным параметром, определяющим качество отслеживания и навигации. Для оценки качества 3D реконструкции используется метрика Chamfer Distance, представляющая собой среднее расстояние от точки на реконструктированной поверхности до ближайшей точки на эталонной (ground truth) поверхности. Чем меньше значение Chamfer Distance, тем выше степень соответствия между реконструированной моделью и реальной анатомией субъекта. Данная метрика позволяет количественно оценить ошибки реконструкции и оптимизировать процесс создания PHM для достижения необходимой точности, особенно в контексте применений, требующих высокой степени соответствия, таких как транскраниальная магнитная стимуляция (TMS) и нейронавигация.
Обеспечение надежной валидации является критически важным этапом при разработке алгоритмов бесконтактного отслеживания движения головы. Часто производимая оценка точности таких алгоритмов осуществляется путем сравнения полученных данных с эталонными, полученными с использованием систем на основе маркеров, таких как NDI Polaris Vicra. Данный подход позволяет выявлять расхождения между данными, полученными разными методами, и, следовательно, определять области, требующие дальнейшей оптимизации и улучшения алгоритмов бесконтактного отслеживания. Анализ этих расхождений способствует повышению общей надежности и точности систем отслеживания, особенно в контексте применения в нейронавигации и других медицинских приложениях.
Исследование продемонстрировало, что бесконтактное отслеживание головы с использованием потребительских RGB-D сенсоров достигает среднеквадратичной ошибки (RMSD) по трансляции ≤ 5.0 — 5.7 мм, что находится в пределах погрешности стандартных маркеров-ориентированных систем нейронавигации TMS. RMSD по углу поворота также оказался в пределах клинически приемлемых значений. Кроме того, методы, использующие стерео RGB + PHM, показали значительно более низкий процент отказов по сравнению с NDI, и сопоставимый с методами, основанными на глубинной информации, демонстрируя повышенную надежность, что подтверждается p-значением < 0.001 для многих сравнений.
![Персонализированная модель головы (PHM) создается путем подгонки 3D-морфной модели к индивидуальному лицевому шаблону, обеспечивая полное и аннотированное представление геометрии головы и лица посредством совместного выравнивания и оптимизации параметров, как описано в разделе 3.1.4 и Schlesinger et al. [57].](https://arxiv.org/html/2602.07052v1/Figures/PHM.png)
Исследование, представленное в данной работе, демонстрирует стремление к элегантности и точности в области нейронавигации. Разработка системы отслеживания положения головы без маркеров, использующей доступное оборудование и передовые методы компьютерного зрения, подтверждает важность математической чистоты алгоритмов. Как однажды заметил Ян ЛеКун: «Машинное обучение — это математика, а не магия». Эта фраза особенно актуальна здесь, поскольку точность и надежность системы напрямую зависят от корректности и доказуемости используемых алгоритмов, а не от эмпирических наблюдений. Стремление к масштабируемости и асимптотической устойчивости, лежащее в основе данной разработки, соответствует принципам эффективного и надежного решения сложных задач.
Куда Дальше?
Без четкого определения критериев «достаточной» точности, любое усовершенствование системы навигации, основанной на отслеживании положения головы, есть лишь приближение к недостижимому идеалу. Представленная работа демонстрирует возможность получения приемлемых результатов, но не решает фундаментальный вопрос: как определить, когда система достаточно надежна для клинического применения? Утверждения о «точности» без строгого математического обоснования — это, в лучшем случае, эмпирические наблюдения, а не научные доказательства.
Дальнейшие исследования должны быть сосредоточены не на увеличении количества «тестов», а на разработке формальной модели ошибок. Необходимо определить границы допустимой погрешности, учитывая не только технические ограничения сенсоров, но и физиологические особенности пациента. Разработка алгоритмов, устойчивых к артефактам и помехам, — это не просто инженерная задача, а вопрос математической элегантности. Любое решение, не поддающееся формальному доказательству, — это временное решение, обреченное на провал.
Перспективы, безусловно, существуют. Использование более сложных 3D-моделей, адаптация к индивидуальным особенностям анатомии пациента, интеграция с другими модальностями визуализации — все это может улучшить результаты. Однако, без строгого математического подхода, любое усовершенствование останется лишь косметическим улучшением. Истинный прогресс требует не просто «работы», а доказательства.
Оригинал статьи: https://arxiv.org/pdf/2602.07052.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- СПБ Биржа: «Газпром» в фаворе, «Т-техно» под давлением, дефицит юаней тревожит инвесторов (22.03.2026 22:33)
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- Макросъемка
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Искусственные мозговые сигналы: новый горизонт интерфейсов «мозг-компьютер»
- Российский рынок: между ставкой ЦБ, геополитикой и отчетами компаний (25.03.2026 17:32)
- Прогнозы цен на эфириум к рублю: анализ криптовалюты ETH
- Motorola Edge 30 Pro ОБЗОР: скоростная съёмка видео, скоростная зарядка, беспроводная зарядка
- От фотографий к фильмам: полное руководство по переходу на видеосъемку
- Три простых изменения в светлой комнате, чтобы создать свой объект съемки.
2026-02-10 15:52