Автор: Денис Аветисян
Новая архитектура объединяет возможности нейронных сетей и стереовидения для достижения беспрецедентной точности и реалистичности в создании трехмерных моделей.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"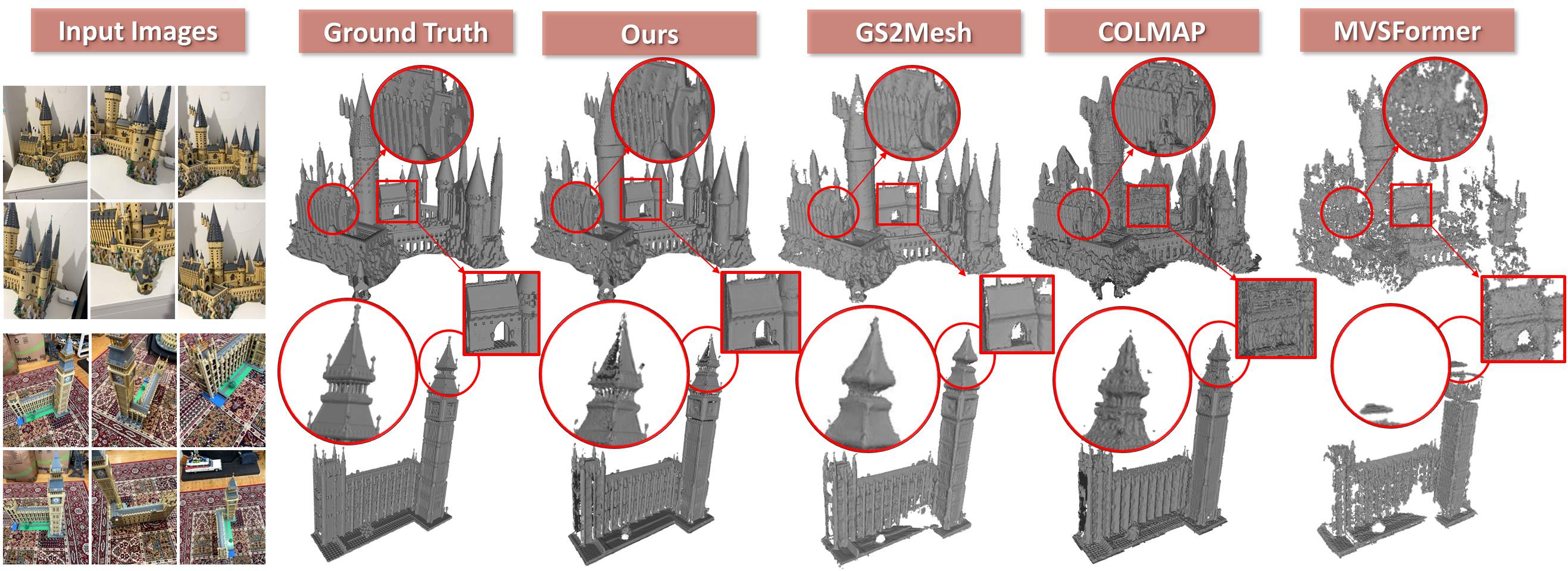
Представлена NeVStereo — система, использующая NeRF и стерео-зрение для одновременной 3D-реконструкции, оценки позы и синтеза новых видов, превосходящая существующие методы по точности и надежности.
Современные подходы к плотной 3D-реконструкции часто разделяют задачи оценки позы камеры, предсказания глубины и синтеза новых видов, что ограничивает их общую производительность. В данной работе представлена архитектура ‘NeVStereo: A NeRF-Driven NVS-Stereo Architecture for High-Fidelity 3D Tasks’, объединяющая возможности нейронного рендеринга на основе NeRF и стерео зрения для совместного решения задач оценки позы, построения карт глубины, синтеза новых видов и реконструкции поверхностей. Предложенный фреймворк демонстрирует значительное улучшение точности и надежности по сравнению с существующими методами, снижая ошибку глубины до 36%, повышая точность оценки позы на 10.4% и обеспечивая более высокое качество синтезированных изображений. Сможет ли NeVStereo стать основой для создания более эффективных и универсальных систем 3D-восприятия?
Вызов трёхмерной реконструкции: ограничения традиционных подходов
Создание точных и масштабируемых трехмерных реконструкций из изображений представляет собой сложную задачу, зачастую сдерживаемую высокими вычислительными затратами и несоответствиями в оценке глубины. Проблема заключается в том, что алгоритмы, стремящиеся воссоздать трехмерное пространство на основе двухмерных изображений, сталкиваются с неоднозначностями и шумами, которые приводят к ошибкам в определении расстояния до объектов. Вычислительная сложность возрастает экспоненциально с увеличением размера сцены и детализации требуемой модели, что делает обработку больших наборов данных крайне ресурсоемкой. Неточности в оценке глубины, даже незначительные, могут привести к искажениям в реконструированной модели, что особенно критично для приложений, требующих высокой точности, таких как робототехника и виртуальная реальность. Таким образом, поиск эффективных и надежных методов, способных преодолеть эти ограничения, остается актуальной задачей в области компьютерного зрения и трехмерной графики.
Традиционные методы трехмерной реконструкции, такие как Structure from Motion (SfM), демонстрируют значительные трудности при обработке масштабных сцен. Суть проблемы заключается в экспоненциальном росте вычислительной сложности с увеличением количества изображений и площади реконструируемого пространства. Для достижения приемлемого результата часто требуется обширная ручная настройка параметров алгоритма, включая выбор ключевых точек, фильтрацию шумов и оптимизацию камер. Этот процесс не только требует значительных временных затрат, но и подвержен субъективным ошибкам, что снижает точность и надежность получаемой трехмерной модели. Таким образом, SfM, несмотря на свою эффективность в ограниченных масштабах, оказывается недостаточно эффективным и автоматизированным для решения задач, требующих реконструкции крупных объектов или обширных территорий.
Растущая потребность в реалистичных и детализированных трехмерных моделях в таких областях, как робототехника и виртуальная реальность, обуславливает необходимость разработки более надежных и эффективных методов реконструкции. В робототехнике точные 3D-модели окружающей среды критически важны для навигации, планирования траектории и взаимодействия с объектами. В свою очередь, виртуальная реальность требует высококачественных 3D-реконструкций для создания иммерсивных и убедительных пользовательских впечатлений. Традиционные подходы зачастую не справляются с этой задачей из-за вычислительных ограничений и сложностей в обеспечении согласованности глубин, что стимулирует поиск инновационных решений, способных обеспечить как точность, так и масштабируемость реконструкции для широкого спектра приложений.
Нейронные поля излучения: рождение нового подхода к 3D-реконструкции
Нейронные поля излучения (NeRF) представляют собой новый подход к 3D-реконструкции, в котором сцены моделируются как непрерывные волюметрические функции. В отличие от традиционных методов, использующих дискретные представления, такие как сетки или облака точек, NeRF кодирует сцену как функцию, отображающую 3D-координаты и направление обзора в цвет и плотность. Это позволяет синтезировать фотореалистичные изображения с произвольных точек зрения, интерполируя значения цвета и плотности вдоль лучей, проходящих через сцену. Эффективно, NeRF представляет сцену не как набор отдельных элементов, а как непрерывное поле, что обеспечивает более высокое качество рендеринга и детализацию, особенно при взгляде под новыми углами.
В основе NeRF лежит обучение отображения, связывающего трехмерные координаты точки и направление взгляда с ее цветом и плотностью. Это позволяет синтезировать фотореалистичные изображения с произвольных точек обзора. Однако, процесс обучения и последующий рендеринг требуют значительных вычислительных ресурсов. Оптимизация модели включает в себя поиск параметров, минимизирующих разницу между синтезированными изображениями и реальными данными, что является ресурсоемкой задачей. Рендеринг, требующий вычисления цвета и плотности для каждой точки вдоль луча, проходящего через пиксель изображения, также значительно увеличивает вычислительную сложность и время обработки.
Несмотря на выдающееся качество реконструируемых сцен, технология NeRF сталкивается с проблемами в скорости рендеринга и масштабируемости. Вычислительные затраты, связанные с обработкой больших объемов данных и трассировкой лучей через сложную нейронную сеть, ограничивают применение NeRF в реальном времени и для обработки масштабных сцен. Это стимулирует активные исследования в области оптимизации архитектуры NeRF, разработки методов ускорения рендеринга, таких как вокселизация и кеширование, а также применения техник сжатия данных для уменьшения вычислительной нагрузки и повышения эффективности обработки.

NVS-Stereo: союз нейронных сетей и традиционной стереореконструкции
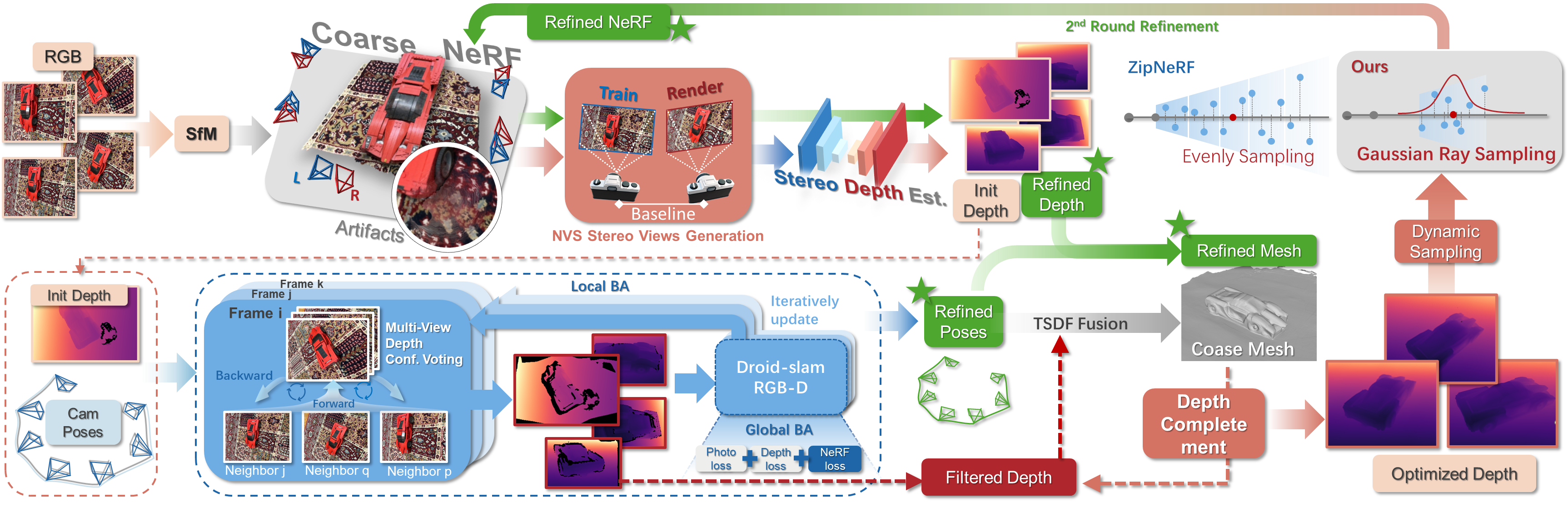
NVS-Stereo представляет собой новую структуру, объединяющую возможности Neural Radiance Fields (NeRF) для синтеза новых видов с традиционными методами стереореконструкции. Данный подход позволяет повысить точность и надежность 3D-реконструкции за счет совместной оптимизации параметров NeRF и оценки положения камеры на основе стереоданных. Интеграция этих двух направлений позволяет использовать сильные стороны каждого из них: NeRF обеспечивает реалистичный синтез видов, а стереореконструкция — точную оценку глубины и геометрии сцены, что приводит к улучшению качества получаемой 3D-модели.
Метод NVS-Stereo объединяет оценку глубины на основе стереоизображений и оптимизацию положения камеры в рамках конвейера NeRF, что позволяет добиться синергетического эффекта. Традиционные методы стереореконструкции предоставляют начальную оценку глубины и точные положения камер, которые используются для инициализации и регуляризации NeRF. В свою очередь, NeRF обеспечивает сглаживание и детализацию реконструкции, компенсируя недостатки стереометодов в областях с недостаточной текстурой или сложной геометрией. Такая интеграция позволяет получить высококачественные 3D-реконструкции при снижении вычислительных затрат по сравнению с использованием NeRF без начальной оценки глубины и оптимизации положения камеры.
Метод NVS-Stereo применяет оптимизацию, управляемую достоверностью многовидных изображений, для одновременного уточнения как представления NeRF, так и оценок положений камер. Это позволяет снизить ошибку определения глубины на 36% и повысить точность оценки положения на 10,4% — относительная среднеквадратичная ошибка (RTE) составила 0.0215 против 0.0240 в сравнительных тестах. Оптимизация, основанная на достоверности, позволяет более эффективно использовать информацию из различных видов, что приводит к повышению общей точности и надежности реконструкции.

Подтверждение эффективности: тестирование на разнообразных наборах данных
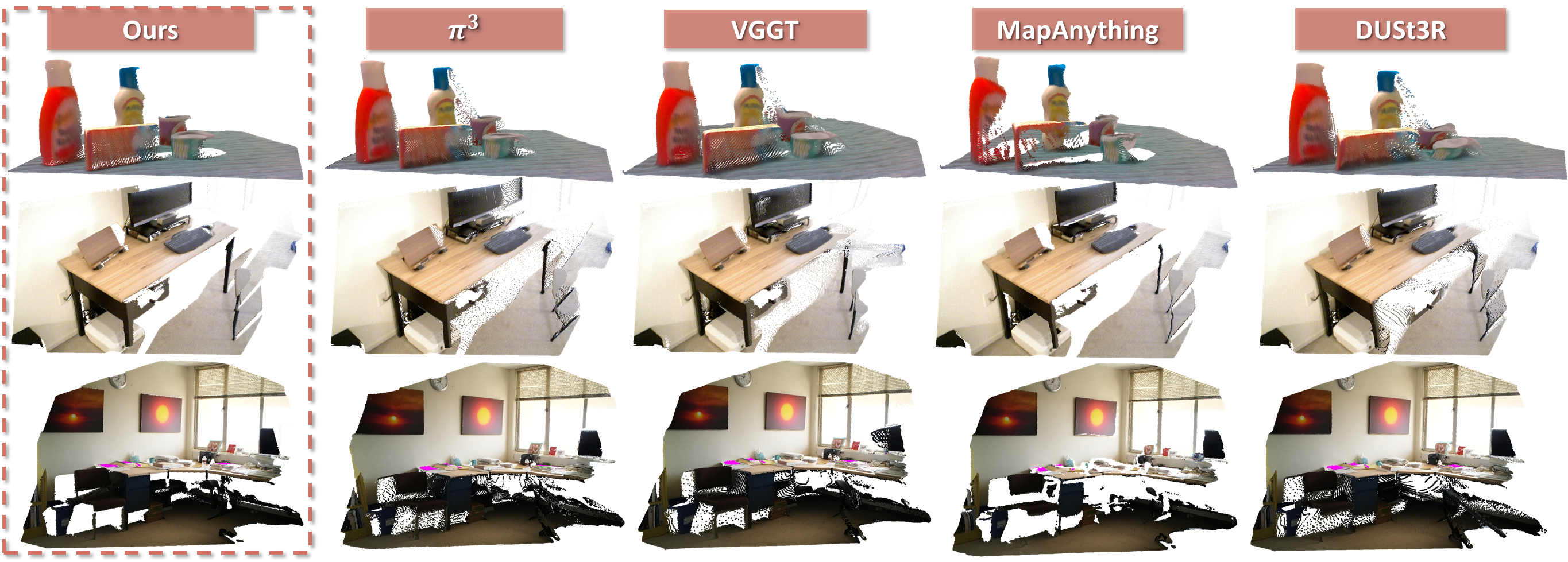
В ходе обширных экспериментов на различных наборах данных, включая ScanNet++, Replica, WildUAV и NVIDIA-HOPE, NeVStereo демонстрирует стабильное превосходство над существующими передовыми методами в области качества 3D-реконструкции. Результаты показывают, что NeVStereo последовательно обеспечивает более точное и детализированное воссоздание сцен по сравнению с альтернативными подходами, что подтверждается данными, полученными на разнообразных тестовых примерах и сценариях. Такая производительность указывает на высокую эффективность алгоритма в обработке различных типов данных и геометрий.
Оценка качества реконструированных 3D-моделей проводилась с использованием метрик PSNR (Peak Signal-to-Noise Ratio), SSIM (Structural Similarity Index) и LPIPS (Learned Perceptual Image Patch Similarity). Результаты экспериментов демонстрируют превосходство NeVStereo над существующими методами: зафиксировано увеличение показателя NVS Render PSNR на 4.5%. Более высокие значения PSNR указывают на меньший уровень шума и более высокую детализацию реконструированных моделей, что подтверждает улучшенную визуальную достоверность и точность геометрии.
Метод демонстрирует повышенную устойчивость к сложным условиям реконструкции, включая сцены с недостаточной текстурой и сложной геометрией. При оценке качества получаемой сетки, NeVStereo достигает лучших в классе показателей: F1-score составляет 91.93% (против 89.30% у конкурентов) и расстояние Чамфера (Chamfer distance) — 4.35 мм (против 4.74 мм). Данные метрики подтверждают способность метода формировать высококачественные 3D-модели даже в сложных сценариях.
Взгляд в будущее: расширяя горизонты нейронной 3D-реконструкции
Будущие исследования в области NeVStereo направлены на расширение масштабов реконструируемых сцен, включая значительно более крупные и сложные объекты и окружения. Помимо увеличения масштаба, особое внимание уделяется разработке методов, обеспечивающих реконструкцию и рендеринг в реальном времени. Это позволит создавать интерактивные трехмерные модели, которые можно будет исследовать и манипулировать ими без задержек, открывая новые возможности для приложений в робототехнике, виртуальной реальности и автоматизированном моделировании. Успешная реализация этих направлений потребует оптимизации алгоритмов и использования более эффективных аппаратных средств, что станет ключевым фактором для практического применения технологии NeVStereo в широком спектре областей.
Исследования показывают, что объединение NeVStereo с другими методами сенсорного ввода, такими как лидары и радары, способно значительно повысить точность и надежность трехмерной реконструкции. В то время как NeVStereo эффективно использует визуальную информацию, лидары и радары предоставляют данные о глубине и геометрии сцены, которые не зависят от освещения и текстуры. Комбинирование этих источников информации позволяет создавать более полные и точные трехмерные модели, особенно в сложных условиях, таких как плохое освещение, зашумленные сцены или наличие отражающих поверхностей. Такой мультисенсорный подход открывает возможности для применения в автономных системах, робототехнике и расширенной реальности, где надежное восприятие окружающей среды является критически важным.
Разработка более эффективных и масштабируемых представлений NeRF, таких как 3D Gaussian Splatting, открывает захватывающие перспективы для создания принципиально новых иммерсивных виртуальных и дополненных реальностей. В отличие от традиционных методов, требующих огромных вычислительных ресурсов для рендеринга сложных сцен, 3D Gaussian Splatting позволяет значительно ускорить процесс, представляя сцену в виде набора трехмерных гауссовых функций. Это обеспечивает не только реалистичное отображение, но и возможность интерактивного взаимодействия с виртуальным окружением в реальном времени, что крайне важно для приложений, требующих высокой отзывчивости, таких как игры, симуляторы и системы удаленного присутствия. Подобные инновации позволяют преодолеть существующие ограничения и приблизить эру действительно убедительных и доступных иммерсивных технологий.

Представленная работа демонстрирует, как современные подходы к нейронному рендерингу, такие как NeRF, способны преобразить привычные методы стереоскопической реконструкции. Подобно алхимику, превращающему свинец в золото, авторы объединили NeRF и NVS-Stereo, создав систему, превосходящую предшественников в точности и устойчивости. Как однажды заметил Ян ЛеКюн: «Глубокое обучение — это создание машин, способных учиться на ошибках». Это высказывание особенно актуально здесь, поскольку NeVStereo, по сути, учится на расхождениях между данными стереопар и нейронным представлением сцены, непрерывно уточняя свою модель мира. Подобная адаптация к несовершенству данных, а не стремление к абсолютной точности, и есть ключ к созданию действительно надёжных систем 3D-реконструкции.
Что дальше?
Архитектура NeVStereo, несомненно, ловко обходит многие ограничения существующих методов, но данные — это лишь шепот хаоса, аккуратно упакованный в форму цифр. Иллюзия точности, которую демонстрируют графики, всегда настораживает. Чем лучше модель предсказывает, тем сильнее возникает подозрение, что она просто красиво лжёт. Ключевая проблема, как и всегда, заключается не в создании более сложного заклинания, а в понимании, где это заклинание перестанет работать.
Будущие исследования, вероятно, столкнутся с необходимостью преодолеть хрупкость NeRF в условиях недостаточной освещённости или при наличии динамических объектов. Устойчивость к шуму — это не просто вопрос фильтрации, а признание того, что шум — это просто правда, которой не хватило уверенности. Попытки интегрировать априорные знания, основанные на физических моделях сцены, могут оказаться более плодотворными, чем дальнейшее усложнение нейронных сетей.
В конечном счёте, истинный прогресс, возможно, заключается не в создании идеальной 3D-реконструкции, а в признании того, что сама реальность не является идеально гладкой и детерминированной. Поиск не в точности, а в элегантности несовершенства. Возможно, стоит научиться видеть красоту в артефактах, а не пытаться их искоренить.
Оригинал статьи: https://arxiv.org/pdf/2602.05423.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Рынок в ожидании ставки: что ждет рубль, нефть и акции? (20.03.2026 01:32)
- СПБ Биржа: «Газпром» в фаворе, «Т-техно» под давлением, дефицит юаней тревожит инвесторов (22.03.2026 22:33)
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Макросъемка
- От фотографий к фильмам: полное руководство по переходу на видеосъемку
- Три простых изменения в светлой комнате, чтобы создать свой объект съемки.
- Мозг и Искусственный Интеллект: Общая Система Координат
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- Прогнозы цен на эфириум к рублю: анализ криптовалюты ETH
- Искусственные мозговые сигналы: новый горизонт интерфейсов «мозг-компьютер»
2026-02-08 23:33