Автор: Денис Аветисян
Исследователи представили ViTaS — инновационную систему, объединяющую визуальную и тактильную информацию для повышения эффективности обучения роботов выполнению сложных задач.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"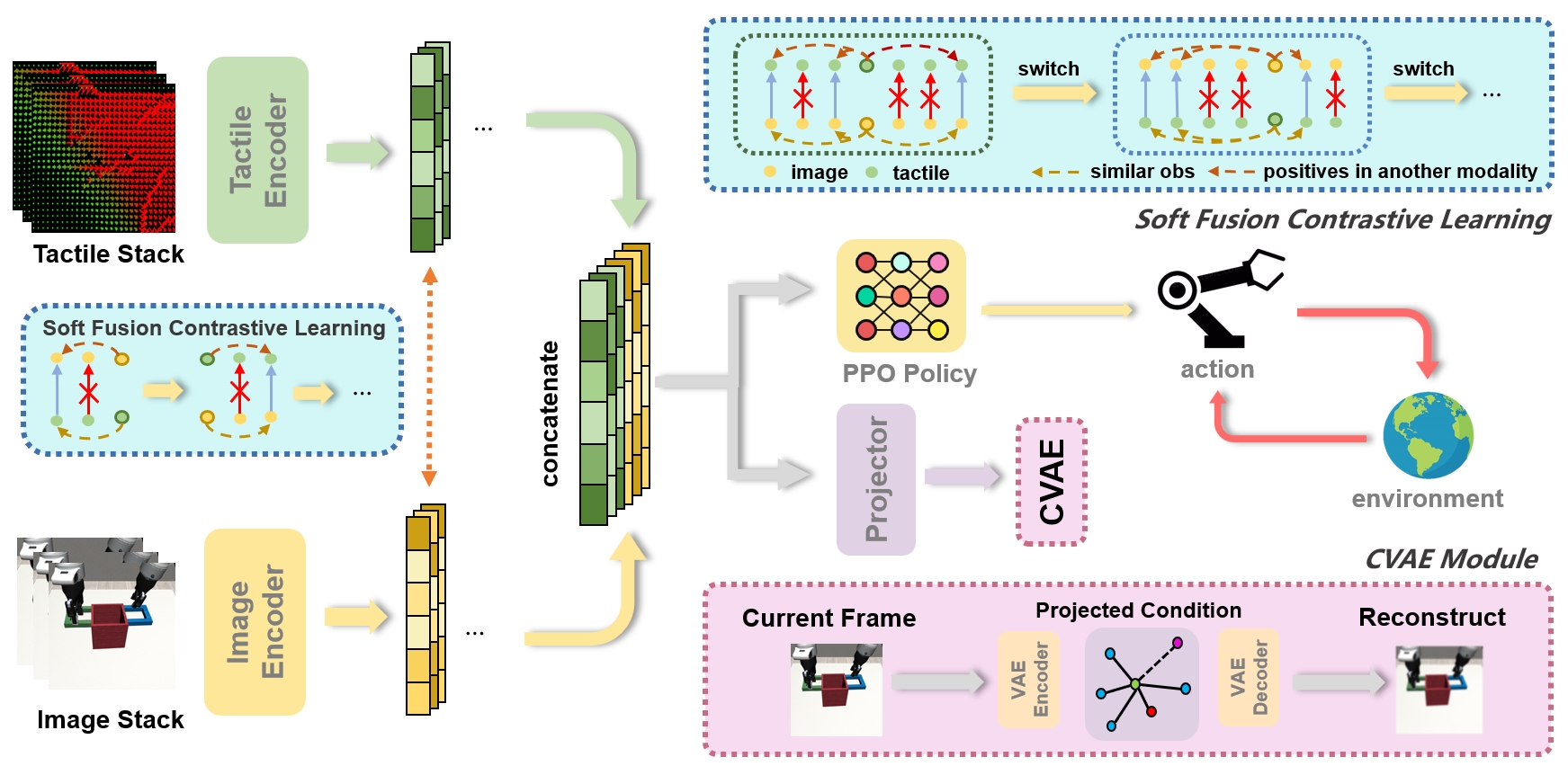
ViTaS использует контрастное обучение и вариационный автоэнкодер для создания эффективного фьюзинга мультимодальных данных, демонстрируя передовые результаты в симуляции и реальных условиях.
Несмотря на значительный прогресс в области робототехники, эффективная интеграция визуальной и тактильной информации для манипуляций остается сложной задачей, особенно в условиях частичной окклюзии. В данной работе представлена новая платформа ViTaS: Visual Tactile Soft Fusion Contrastive Learning для визуально-моторного обучения, использующая контрастное обучение и вариационный автоэнкодер для более эффективного объединения этих модальностей. Эксперименты в симулированных и реальных средах демонстрируют, что предложенный подход значительно превосходит существующие методы, обеспечивая повышенную робастность и точность манипуляций. Возможно ли дальнейшее расширение принципов мягкого слияния и контрастного обучения для создания еще более адаптивных и интеллектуальных робототехнических систем?
Прозрение сквозь сенсорный барьер: Необходимость слияния зрения и осязания
Роботизированные манипуляции зачастую ограничиваются недостаточным объемом сенсорной информации, что существенно снижает их способность адаптироваться к изменяющимся условиям и обеспечивает хрупкость функционирования. В большинстве случаев, роботы полагаются преимущественно на визуальные данные или данные от силовых сенсоров, игнорируя важные тактильные ощущения, которые позволяют человеку мгновенно оценивать свойства объектов, такие как текстура, жесткость и форма. Это приводит к тому, что роботы испытывают трудности при взаимодействии со сложными или неопределенными объектами, а также при выполнении задач, требующих тонкой моторики и точной оценки сил. Недостаток полной сенсорной картины препятствует формированию надежного представления об окружающей среде и, как следствие, ограничивает возможности робота по выполнению сложных манипуляций в реальном времени.
Для достижения уровня ловкости и понимания объектов, сравнимого с человеческим, интеграция зрительной и тактильной информации представляется необходимой. В то время как зрение обеспечивает общее представление об окружении и форме объекта, тактильное восприятие предоставляет детализированные данные о текстуре, жесткости и силе сцепления. Совместное использование этих модальностей позволяет роботам не только идентифицировать объекты, но и адаптировать стратегии манипулирования в реальном времени, учитывая их физические свойства. Например, робот, способный одновременно видеть и ощущать предмет, может определить, как надежно его захватить, избегая повреждений или случайного выскальзывания. Такое синергетическое взаимодействие между зрением и осязанием является ключевым шагом к созданию действительно интеллектуальных и универсальных роботизированных систем.
Существующие методы интеграции зрительной и тактильной информации зачастую сталкиваются с трудностями, что негативно сказывается на производительности робототехнических систем при выполнении сложных задач. Несмотря на значительные успехи в отдельных областях, полноценное слияние этих модальностей остается проблемой. Нередко наблюдается рассинхронизация данных, неэффективная обработка шумов или неспособность системы адекватно учитывать взаимосвязь между визуальными и тактильными ощущениями. В результате, роботы испытывают затруднения при манипулировании деформируемыми объектами, распознавании текстур или адаптации к изменяющимся условиям окружающей среды, демонстрируя существенно более низкую эффективность по сравнению с человеческими возможностями. Преодоление этих ограничений требует разработки новых алгоритмов и архитектур, способных обеспечить более тесную и надежную интеграцию зрительной и тактильной информации.
ViTaS: Новый каркас для обучения представлений, объединяющих зрение и осязание
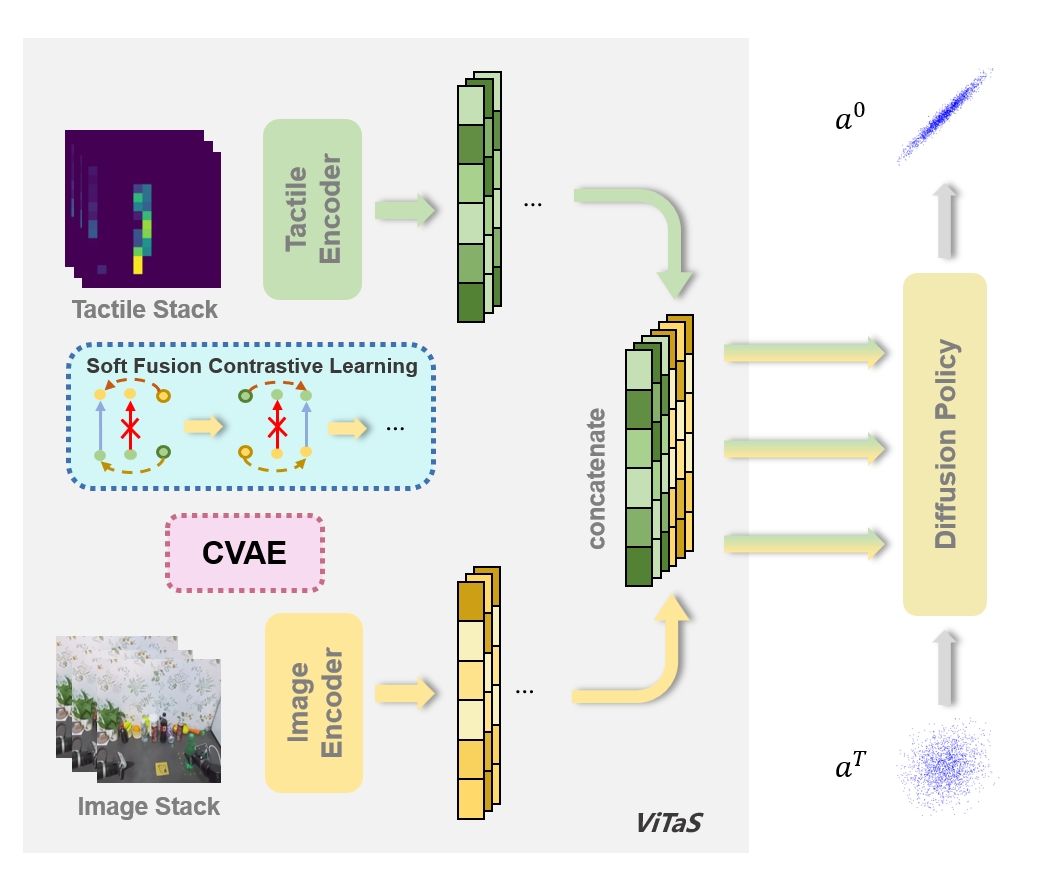
Визуально-тактильное мягкое объединение с использованием контрастного обучения (ViTaS) предполагает сопоставление визуальных и тактильных представлений в общем латентном пространстве посредством максимизации сходства между соответствующими парами данных и минимизации сходства между несвязанными парами. Этот процесс достигается путем формирования пар положительных и отрицательных примеров, где положительные примеры представляют собой визуальные и тактильные данные, полученные из одного и того же взаимодействия, а отрицательные примеры — данные из разных взаимодействий. В процессе обучения используется функция потерь контраста, которая стимулирует модель создавать близкие представления для положительных пар и отдаленные — для отрицательных. Такой подход позволяет модели изучать общие характеристики между визуальной и тактильной модальностями, формируя робастные и обобщающие представления.
Для обеспечения согласованности между визуальными и тактильными данными и сохранения информации, в ViTaS используется условный вариационный автоэнкодер (CVAE). CVAE реконструирует визуальные наблюдения на основе объединенных (fused) эмбеддингов, полученных из визуального и тактильного потоков. Процесс реконструкции заставляет модель изучать представления, в которых визуальные данные могут быть достоверно восстановлены из мультимодальных эмбеддингов, тем самым обеспечивая соответствие между модальностями и предотвращая потерю информации в процессе обучения. Условная природа CVAE позволяет модели генерировать визуальные наблюдения, специфичные для данного тактильного ввода, что способствует более точному представлению взаимосвязи между визуальными и тактильными стимулами.
Архитектура ViTaS способствует обучению богатых и разделенных представлений, отражающих взаимосвязи между визуальными и тактильными стимулами. Разделение представлений достигается за счет контрастивного обучения и использования Conditional Variational Autoencoder (CVAE), что позволяет модели выделять независимые факторы вариации в данных. В результате, модель способна формировать представления, в которых различные аспекты визуальных и тактильных характеристик объектов представлены отдельными компонентами, что облегчает последующую обработку и анализ мультимодальных данных, а также улучшает обобщающую способность системы.
Проверка ViTaS: Результаты в задачах роботизированной манипуляции
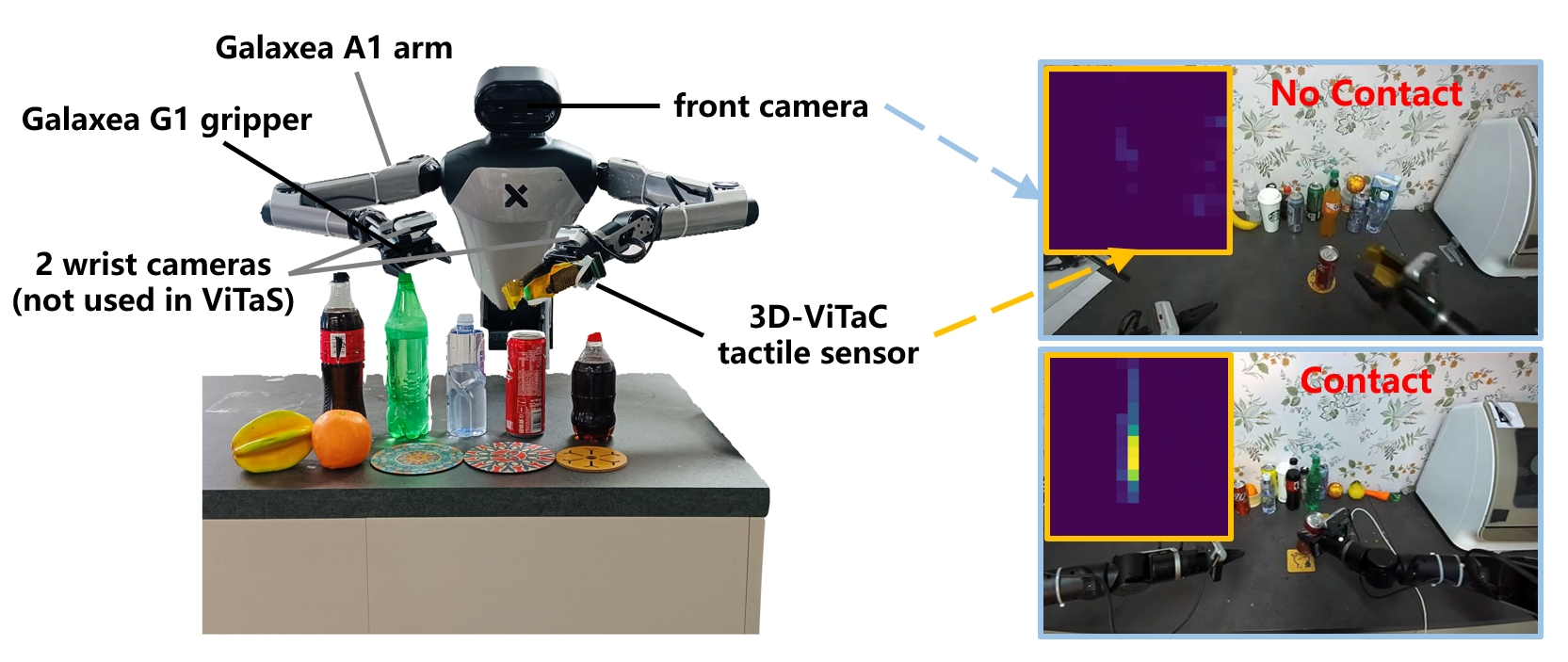
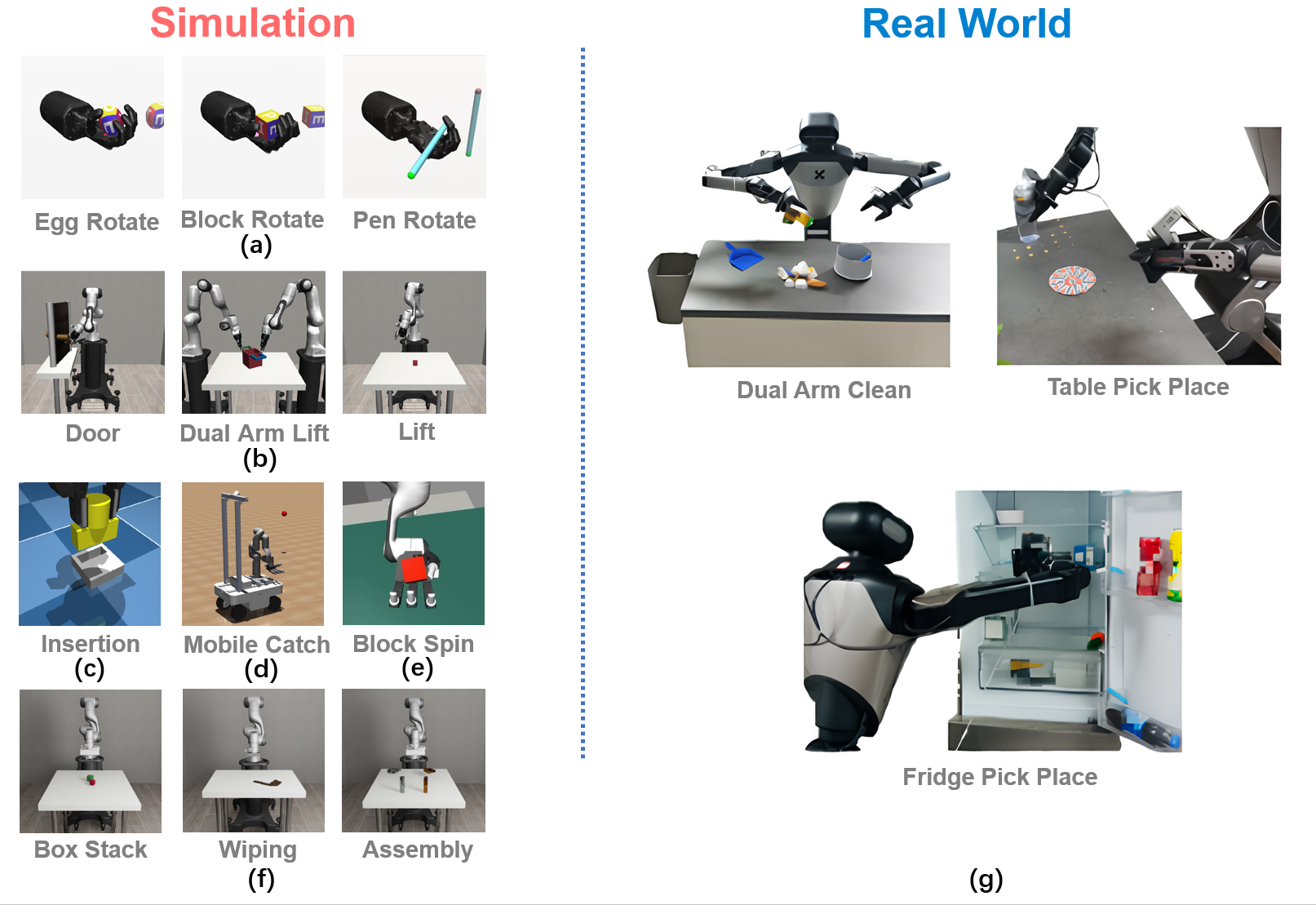
В ходе реальных экспериментов фреймворк ViTaS продемонстрировал превосходные результаты в задачах роботизированной манипуляции, включая вращение объектов и распознавание предметов. Среднее увеличение процента успешного выполнения задач по сравнению с существующими методами составило 16%. Данный показатель подтверждает эффективность ViTaS в сценариях, требующих точного управления и адаптации к различным условиям окружающей среды. В рамках тестирования применялись стандартные метрики оценки успешности манипуляции, что позволяет сопоставить результаты с другими существующими системами.
В основе ViTaS лежит эффективное использование комплементарной информации, получаемой от визуальных и тактильных сенсоров. Такой подход позволяет системе адаптироваться к различным условиям и повышает её устойчивость к шумам и неопределенностям в данных. Визуальные данные обеспечивают общее понимание сцены и идентификацию объектов, в то время как тактильные данные предоставляют детальную информацию о форме, текстуре и силе контакта, что особенно важно для точных манипуляций. Комбинирование этих двух источников информации позволяет ViTaS более надежно выполнять задачи по сравнению с системами, использующими только один тип сенсоров.
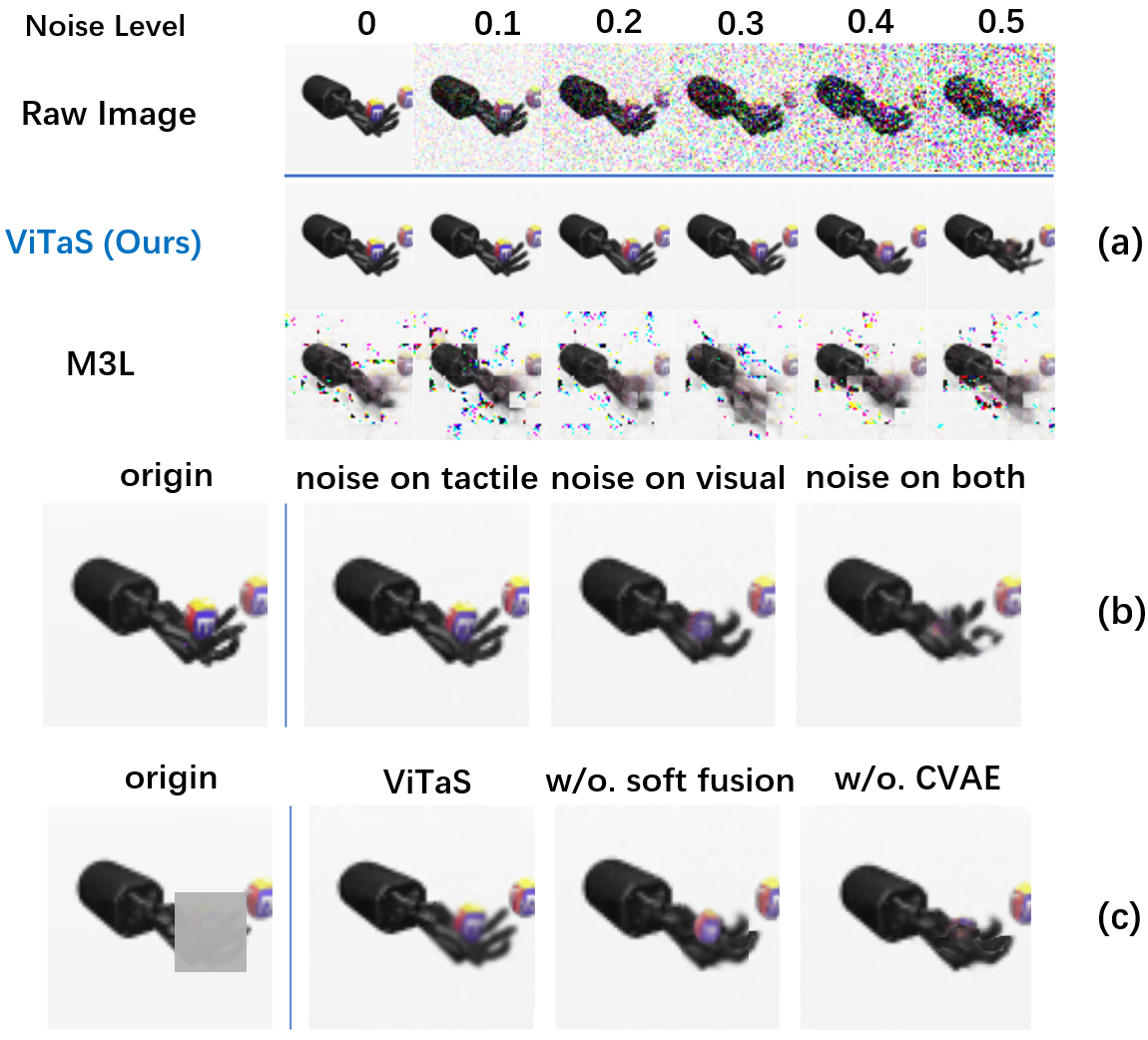
Альтернативные подходы к визуально-моторному обучению, такие как M3L и VTT, показали свою эффективность в задачах управления роботами. Однако, экспериментальные данные демонстрируют, что использование представления, разработанного в рамках ViTaS, позволяет значительно улучшить их производительность. Интеграция ViTaS с существующими фреймворками M3L и VTT привела к повышению точности и устойчивости манипуляций, что указывает на потенциал ViTaS в качестве компонента для расширения возможностей существующих систем управления роботами.
Помимо ViTaS, эффективное использование визуально-тактильных представлений демонстрирует фреймворк PoE, являющийся архитектурой, схожей с вариационным автоэнкодером (VAE). PoE, как и ViTaS, позволяет объединять информацию, получаемую от визуальных и тактильных сенсоров, для повышения надежности и адаптивности систем манипулирования. Хотя ViTaS показывает превосходные результаты, PoE подтверждает перспективность подхода, основанного на использовании представлений, полученных посредством VAE-подобных моделей, для задач робототехники.
Экспериментальные исследования показали, что тактильная информация играет критически важную роль в задачах роботизированной манипуляции. При исключении тактильных данных из системы наблюдалось среднее снижение производительности на 32%. Данный результат подтверждает, что использование как визуальной, так и тактильной информации значительно повышает надежность и адаптивность роботизированных систем в реальных условиях, подчеркивая важность мультисенсорного подхода к управлению роботами.
За пределами текущих ограничений: Перспективы и более широкое влияние
Архитектура ViTaS обладает значительным потенциалом для расширения возможностей восприятия роботов за счет интеграции дополнительных сенсорных модальностей. В частности, включение проприоцепции — ощущения положения и движения собственного тела — и слуха позволит создавать более полные и детализированные представления об окружающей среде. Такой мультисенсорный подход позволит роботу не только “видеть”, но и “чувствовать” и “слышать”, что критически важно для ориентации в сложных и динамичных условиях. Объединение визуальной информации с данными о положении суставов и звуковыми сигналами позволит более точно определять объекты, оценивать их размеры и расстояние до них, а также предсказывать их поведение. В результате, роботы смогут взаимодействовать с миром более естественно и эффективно, преодолевая ограничения, связанные с неполнотой информации, получаемой из одного источника.
Технология, лежащая в основе ViTaS, открывает широкие перспективы для трансформации различных отраслей. В производстве она способна существенно повысить точность и гибкость роботизированных систем, позволяя им адаптироваться к меняющимся условиям и выполнять сложные задачи с минимальным участием человека. В сфере здравоохранения подобные разработки могут найти применение в создании интеллектуальных протезов и экзоскелетов, улучшая качество жизни пациентов с ограниченными возможностями. Не менее значим потенциал в области ассистивной робототехники, где ViTaS позволит создавать роботов-помощников, способных выполнять широкий спектр задач для людей с особыми потребностями, от помощи в быту до обеспечения личной безопасности и поддержки. В целом, данная технология способна не только автоматизировать рутинные процессы, но и расширить возможности человека, открывая новые горизонты в различных сферах деятельности.
Исследования в ближайшем будущем будут направлены на изучение возможности переноса полученных роботом знаний и навыков на новые задачи и окружающую среду. Цель данной работы — разработка алгоритмов, позволяющих роботам быстро и эффективно адаптироваться к незнакомым условиям, избегая необходимости повторного обучения с нуля. Ученые стремятся создать системы, в которых опыт, полученный при решении одной задачи, может быть использован для повышения производительности и эффективности в совершенно иных сценариях. Успешная реализация данного подхода значительно расширит область применения робототехники, позволяя создавать более универсальных и автономных устройств, способных функционировать в динамично меняющемся мире.
Эффективность систем восприятия роботов напрямую зависит от их способности справляться с шумами, особенно с гауссовским шумом, который неизбежно возникает в процессе сбора данных с сенсоров. Исследования показывают, что даже незначительные отклонения в показаниях сенсоров могут существенно снизить точность и надежность работы робота, приводя к ошибкам в навигации, манипулировании объектами и распознавании окружающей среды. Поэтому разработка алгоритмов фильтрации и обработки сенсорных данных, способных эффективно подавлять гауссовский шум без искажения полезного сигнала, является ключевой задачей для повышения устойчивости и работоспособности роботизированных систем в реальных условиях. Успешное решение этой проблемы позволит создавать более надежных и адаптивных роботов, способных эффективно функционировать даже в сложных и зашумленных средах.
Представленная работа демонстрирует стремление к созданию не просто системы, а сложной экосистемы взаимодействия зрения и осязания. ViTaS, используя контрастное обучение и вариационный автоэнкодер, стремится не к максимальной производительности в узко определённой задаче, а к созданию гибкого и адаптивного представления о мире. Ведь, как однажды заметил Линус Торвальдс: «Плохой код похож на плохую шутку: если тебе нужно объяснить, почему она смешная, она не смешная». Аналогично, если система требует сложного объяснения, почему она работает, вероятно, её архитектура слишком сложна и лишена внутренней элегантности. Идеальная архитектура — миф, но стремление к простоте и адаптивности — не просто желательное качество, а необходимость для создания действительно надёжных и масштабируемых систем.
Что дальше?
Представленный подход, объединяющий зрение и тактильные ощущения через контрастное обучение и вариационные автоэнкодеры, лишь прокладывает тропу, а не завершает путь. Каждая зависимость от конкретной архитектуры — это обещание, данное прошлому, и будущее, несомненно, потребует большей гибкости. Системы не строятся, они вырастают, и совершенствование представления о манипуляциях роботами не заключается в достижении «состояния искусства», а в создании условий для его постоянной эволюции.
Иллюзия контроля над сложными системами требует не только соглашений об уровне обслуживания (SLA), но и осознания, что всё, что построено, когда-нибудь начнёт само себя чинить — или ломать. Более глубокое исследование устойчивости к шуму и вариациям в реальном мире, а также адаптация к новым, непредвиденным задачам, представляются ключевыми направлениями. Важно помнить, что истинная сила не в точности моделирования, а в способности системы к самообучению и адаптации к непредсказуемости.
Вместо поиска универсального решения, вероятно, более плодотворным будет подход, ориентированный на создание «экосистем» представлений, способных взаимодействовать и дополнять друг друга. Каждая попытка «слить» модальности — это лишь временный компромисс, а будущее видится в создании систем, способных динамически формировать и перестраивать свои представления в зависимости от контекста и задачи.
Оригинал статьи: https://arxiv.org/pdf/2602.11643.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- OnePlus Nord 6 ОБЗОР: чёткое изображение, замедленная съёмка видео, скоростная зарядка
- Как самому почистить матрицу. Продолжение.
- Неважно, на что вы фотографируете!
- Российский рынок: между ставкой ЦБ, геополитикой и отчетами компаний (25.03.2026 17:32)
- Что купить фотографу. Рекомендации
- MSI Katana 17 HX B14WGK ОБЗОР
- Как исправить ситуацию, когда Windows 10 и 11 не обнаруживают второй монитор
- Как фотографировать на телефон.
- Oppo K14 Turbo Pro ОБЗОР: большой аккумулятор, плавный интерфейс, скоростная зарядка
- Пульт дистанционного управления для фотоаппарата
2026-02-13 18:01