Автор: Денис Аветисян
Новое исследование сравнивает различные варианты расположения тактильных датчиков на роботизированных руках и демонстрирует, что оптимальная конфигурация может существенно повысить эффективность обучения манипуляциям.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"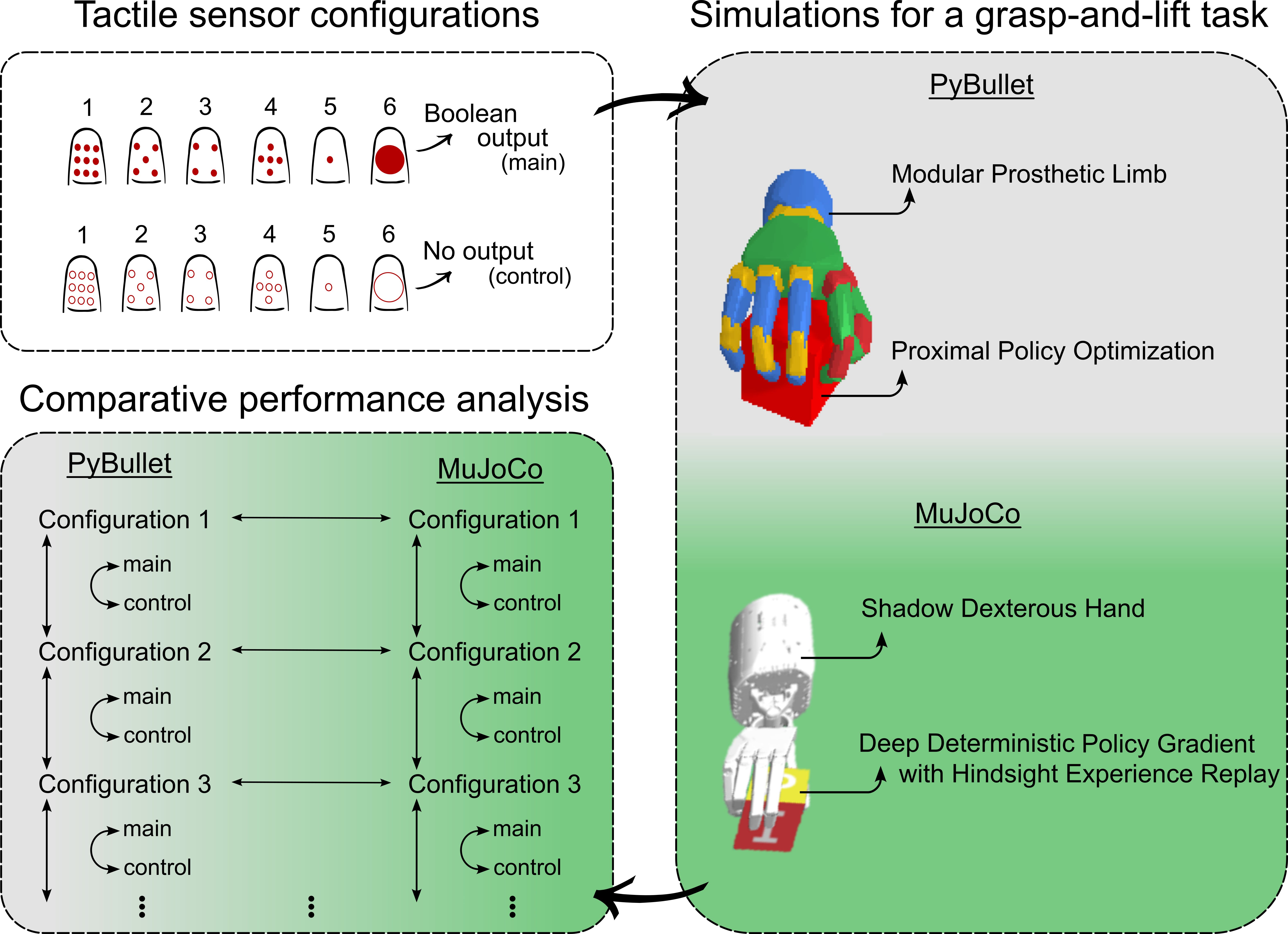
Сравнительный анализ влияния плотности и расположения тактильных датчиков на производительность обучения с подкреплением в симуляции роботизированных рук.
Несмотря на значительный прогресс в области робототехники, эффективное осязание остается сложной задачей для надежного захвата объектов. В работе, посвященной исследованию ‘The impact of tactile sensor configurations on grasp learning efficiency — a comparative evaluation in simulation’, проведено сравнительное изучение влияния различных конфигураций тактильных датчиков на эффективность обучения захвата с использованием обучения с подкреплением. Полученные результаты демонстрируют, что плотность и расположение датчиков существенно влияют на скорость и стабильность обучения, при этом не всегда требуется максимальное покрытие поверхности. Какие оптимальные стратегии размещения тактильных датчиков позволят создать более адаптивные и эффективные роботизированные руки будущего?
Захват как Техдолг: Ограничения Современных Роботизированных Систем
Несмотря на значительный прогресс в робототехнике, задача обеспечения надёжного и адаптивного захвата объектов остаётся сложной. В отличие от человеческой руки, способной легко манипулировать предметами различной формы, размера и текстуры, современные роботизированные системы часто демонстрируют ограниченную функциональность. Роботы испытывают трудности при работе с неопределёнными объектами или в неструктурированной среде, что связано с недостаточной гибкостью и чувствительностью манипуляторов. Эта проблема существенно ограничивает применение роботов в таких областях, как сборочное производство, логистика и здравоохранение, где требуется высокая точность и способность адаптироваться к меняющимся условиям.
Современные роботизированные системы захвата сталкиваются с существенными трудностями при работе с объектами, отличающимися по форме, текстуре и весу. В реальных условиях, где предметы могут быть влажными, скользкими или деформированными, а окружающая среда — непредсказуемой, существующие алгоритмы часто оказываются неэффективными. Например, захват предмета, покрытого пылью, или попытка удержать гибкий предмет, такой как ткань, требуют от робота адаптации, которую большинство систем пока не способны обеспечить. Это ограничивает применение роботов в широком спектре задач, от автоматизации складских операций до помощи в быту, где требуется надежный и гибкий захват разнообразных объектов в постоянно меняющихся условиях.
Отсутствие эффективной тактильной обратной связи является серьезным препятствием для развития надежных роботизированных захватов. В то время как зрение и другие сенсоры предоставляют информацию об объекте, именно тактильные датчики позволяют роботу “чувствовать” силу сжатия, текстуру поверхности и потенциальное скольжение. Без этой информации, робот не способен оперативно корректировать усилие захвата, что приводит к частым ошибкам — от случайных падений предметов до повреждения хрупких объектов. Исследования показывают, что даже небольшие отклонения в силе захвата, незаметные для визуального контроля, могут привести к неустойчивости и потере объекта, особенно в динамичных или непредсказуемых условиях. Разработка высокочувствительных и быстродействующих тактильных датчиков, способных предоставлять детальную информацию о контакте, является ключевой задачей для повышения надежности и адаптивности роботизированных систем.
Тактильная Обратная Связь и Обучение с Подкреплением: Путь к Адаптивности
В нашей системе используются активные тактильные датчики для обеспечения детальной тактильной обратной связи в процессе захвата объектов. Эти датчики регистрируют информацию о силе и распределении давления, контактирующем с поверхностью объекта, что позволяет системе получать данные о форме, текстуре и устойчивости захвата в реальном времени. Полученная тактильная информация используется для корректировки стратегии захвата, повышения надежности удержания и предотвращения проскальзывания, что в конечном итоге обеспечивает более точное и адаптивное управление роботизированной рукой.
Для обучения манипуляторов в симулированных средах используются алгоритмы обучения с подкреплением, в частности, Deep Deterministic Policy Gradient (DDPG) и Proximal Policy Optimization (PPO). DDPG — это алгоритм, основанный на актор-критик подходе, предназначенный для непрерывных пространств действий и использующий детерминированную политику. PPO, также использующий актор-критик архитектуру, является алгоритмом on-policy, который оптимизирует политику, ограничивая изменение политики на каждом шаге, что обеспечивает стабильность обучения. Оба алгоритма позволяют манипулятору научиться оптимальным стратегиям управления, максимизируя получаемое вознаграждение в процессе взаимодействия с симулированной средой.
Комбинирование тактильной обратной связи с обучением с подкреплением позволяет роботизированной руке адаптировать хват к различным характеристикам объектов и неопределенностям окружающей среды. В процессе обучения, тактильные датчики предоставляют информацию о силе и распределении давления при контакте с объектом, что позволяет алгоритму обучения с подкреплением корректировать действия манипулятора в реальном времени. Это позволяет руке не только надежно захватывать объекты различной формы, размера и веса, но и компенсировать внешние возмущения, такие как толчки или скольжение, обеспечивая стабильный и надежный хват даже в сложных условиях. Адаптация происходит за счет непрерывной оптимизации стратегии захвата на основе получаемой тактильной информации и сигналов вознаграждения, что приводит к повышению надежности и эффективности манипуляций.
Строгая Валидация: Метрики и Статистический Анализ
Для оценки эффективности работы манипуляторов в симуляциях использовались такие метрики, как процент успешных захватов и стабильность захвата. Тестирование проводилось в двух физических движках — MuJoCo и PyBullet. В симуляциях MuJoCo использовалась модель Shadow Dexterous Hand, а в PyBullet — Modular Prosthetic Limb. Эти модели подвергались серии испытаний для определения способности манипулятора успешно и надежно захватывать объекты, что позволило количественно оценить производительность различных конфигураций и алгоритмов управления.
Для обеспечения достоверности полученных результатов, ключевые показатели эффективности (KPI) были подвергнуты статистическому анализу с использованием метода бутстрапа. Данный метод позволяет оценить доверительные интервалы для таких метрик, как частота успешных захватов и стабильность захвата, путем многократной перевыборки данных с возвращением. Это позволяет установить диапазон значений, в пределах которого, с определенной вероятностью, находится истинное значение KPI, и оценить статистическую значимость различий между экспериментальными группами и контрольной группой. Расчет доверительных интервалов с помощью метода бутстрапа обеспечивает более надежную оценку эффективности предложенных алгоритмов управления по сравнению с традиционными методами, особенно при ограниченном объеме данных.
Для оценки центральной тенденции и устойчивости результатов, помимо среднего значения, был применен межквартильный размах (IQR). Этот статистический показатель, представляющий собой разницу между 75-м и 25-м процентилями, менее чувствителен к выбросам по сравнению со средним значением, что обеспечивает более надежную оценку типичного значения. Полученные значения межквартильного размаха были соотнесены с эффективностью обучения (Sample Efficiency) манипулятора. Более низкие значения IQR в сочетании с высокой эффективностью обучения свидетельствуют о быстрой сходимости алгоритма и стабильности результатов, что подтверждает способность манипулятора к быстрому освоению задач захвата.
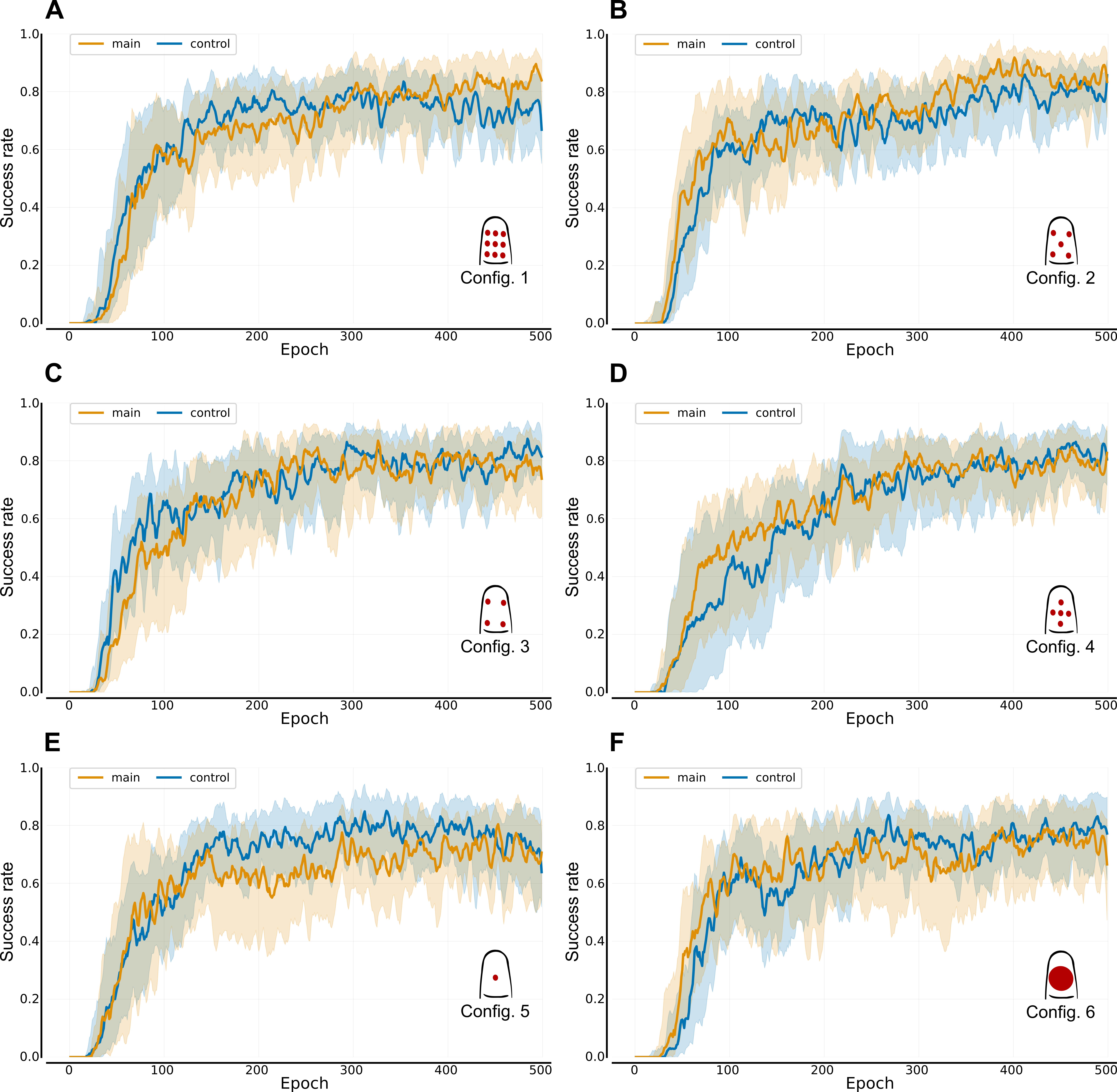
Статистический анализ результатов экспериментов по захвату объектов показал значительное улучшение производительности сенсорной группы по сравнению с контрольной. В симуляциях PyBullet конфигурации 1 и 2 продемонстрировали успешность захвата в 65% и 66% случаев соответственно. Перекрытие доверительных интервалов с контрольной группой составило 3% и 39% соответственно, что подтверждает статистическую значимость различий. Наивысшие показатели успешности захвата (88%) были достигнуты в конфигурациях 1 и 2 в симуляциях MuJoCo. Данные свидетельствуют о положительном влиянии сенсорной обратной связи на эффективность захвата объектов роботизированной рукой.
В ходе экспериментов в среде PyBullet конфигурация 1 продемонстрировала улучшение успешности захвата на 3% по сравнению с контрольной группой, а конфигурация 6 — на 4%. Данные показатели отражают статистически значимую разницу в производительности, полученную в ходе серии симуляций и подтвержденную применением статистических методов анализа. Зафиксированные улучшения свидетельствуют об эффективности предложенных конфигураций в повышении надежности и точности захвата объектов роботизированной рукой.
Перспективы Развития: К Адаптивным и Интеллектуальным Манипуляциям
Исследование открывает новые перспективы для создания более адаптивных и интеллектуальных роботизированных систем, способных эффективно взаимодействовать с разнообразными объектами и выполнять широкий спектр задач. В основе этого прогресса лежит возможность обучения роботов не просто выполнению заранее запрограммированных действий, но и самостоятельной адаптации к новым ситуациям и непредвиденным обстоятельствам. Разработанные алгоритмы позволяют роботам не только захватывать и перемещать предметы, но и учитывать их физические свойства, форму и вес, что значительно расширяет область их применения. Подобный подход к управлению роботами позволяет преодолеть ограничения традиционных систем, где каждое действие требовало точной предварительной настройки, и перейти к более гибким и универсальным решениям, способным к самообучению и оптимизации.
Дальнейшие исследования направлены на повышение эффективности обучения роботов-манипуляторов посредством таких методов, как Hindsight Experience Replay, позволяющего извлекать полезную информацию даже из неудачных попыток. Параллельно ведется разработка и интеграция усовершенствованных тактильных сенсорных систем. Эти системы, обладая более высокой разрешающей способностью и чувствительностью, позволят роботам получать детальную информацию о форме, текстуре и силе сцепления объектов, что критически важно для выполнения сложных манипуляций и адаптации к разнообразным условиям. Сочетание этих подходов позволит значительно ускорить процесс обучения и повысить надежность работы роботов в реальных условиях эксплуатации.
Разработанные технологии обладают значительным потенциалом для кардинальных изменений в ключевых отраслях, таких как производство, логистика и здравоохранение. Возможность выполнения роботами сложных манипуляций с повышенной надежностью и точностью открывает новые горизонты автоматизации. В производственных процессах это может привести к повышению качества продукции и снижению издержек, в логистике — к оптимизации складских операций и ускорению доставки, а в здравоохранении — к более точным хирургическим вмешательствам и улучшению ухода за пациентами. Повышенная надежность роботизированных систем позволит внедрять их в критически важные процессы, где безошибочность выполнения задач является приоритетом, а точность манипуляций — залогом успеха.
В конечном итоге, данное исследование направлено на создание роботизированных помощников, способных органично взаимодействовать с окружающим миром, расширяя возможности человека и улучшая качество жизни. Разработка таких систем предполагает не просто автоматизацию рутинных задач, но и предоставление интеллектуальной поддержки в сложных ситуациях, будь то помощь в производственном процессе, логистике или сфере здравоохранения. Роботы нового поколения призваны стать надежными партнерами, способными адаптироваться к изменяющимся условиям, учиться на собственном опыте и выполнять широкий спектр манипуляций с высокой точностью и безопасностью, тем самым освобождая человека от монотонной работы и позволяя сосредоточиться на более творческих и значимых задачах.
Исследование показывает, что даже упрощенные конфигурации тактильных сенсоров могут обеспечить эффективное обучение захвата у робота. Это не удивительно; как однажды заметил Пол Эрдёш: «В математике, как и в жизни, часто самое элегантное решение — самое простое». Данная работа подтверждает эту мысль, демонстрируя, что высокая плотность сенсоров не всегда является необходимым условием для достижения успеха в обучении манипуляций. Важнее не количество данных, а их грамотная организация и алгоритмы, способные извлечь из них полезную информацию. Архитектура, в данном случае, — это компромисс между точностью и вычислительной сложностью, успешно переживший деплой в симуляторе.
Что дальше?
Исследование влияния конфигурации тактильных датчиков на эффективность обучения захвата, конечно, полезно. Но не стоит обольщаться. Захват в симуляции — это всё ещё захват в симуляции. Реальный мир, как обычно, найдёт способ внести хаос в самые элегантные алгоритмы. Плотность датчиков, их расположение… всё это лишь параметры, которые необходимо будет перенастраивать для каждой новой поверхности, каждого нового объекта. Забудут ли, наконец, о стремлении к «идеальному» датчику, покрывающему каждый миллиметр руки? Сомневаемся.
Вполне вероятно, что в ближайшем будущем мы увидим ещё больше исследований, посвящённых оптимизации расположения датчиков. Будут предлагаться новые метрики, новые алгоритмы… а в итоге окажется, что самое простое решение — это просто больше датчиков. Впрочем, это и не плохо. Всё новое — это просто старое с худшей документацией, и каждый дополнительный датчик — это ещё один способ отложить решение реальной проблемы — создание робота, способного адаптироваться к непредсказуемости мира.
В конечном итоге, самое интересное будет наблюдать не за тем, как улучшаются алгоритмы обучения, а за тем, как инженеры смирятся с неизбежной сложностью реальных систем. Ведь DevOps — это когда инженеры смирились. А значит, в перспективе, нас ждёт ещё больше патчей и обходных решений, чем инноваций.
Оригинал статьи: https://arxiv.org/pdf/2601.10268.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Деформация сеток: новый подход на основе нейронных операторов
- Новые смартфоны. Что купить в марте 2026.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Microsoft Edge позволяет воспроизводить YouTube в фоновом режиме на Android — подписка Premium не требуется.
- Ближний Восток и Рубль: Как Геополитика Перекраивает Российский Рынок (02.03.2026 20:32)
- МосБиржа на подъеме: что поддерживает рынок и какие активы стоит рассмотреть? (27.02.2026 22:32)
- vivo X300 FE ОБЗОР: скоростная зарядка, беспроводная зарядка, плавный интерфейс
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Xiaomi Poco M7 ОБЗОР: плавный интерфейс, удобный сенсор отпечатков, большой аккумулятор
- Российский рынок в 2025: Инвестиции, Экспорт и Новые Возможности (27.02.2026 15:32)
2026-01-16 11:31