Автор: Денис Аветисян
Новая платформа UniVTAC позволяет создавать и обучать роботов, способных к сложным манипуляциям, используя данные о зрении и осязании.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"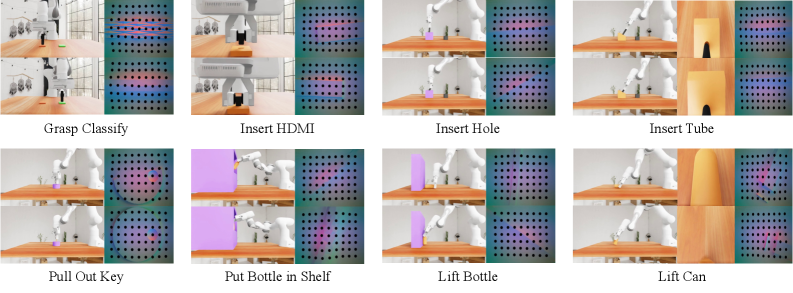
UniVTAC — это унифицированная платформа для генерации данных, обучения и оценки моделей восприятия и управления в контактных средах.
Несмотря на значительный прогресс в области робототехники, надежное манипулирование объектами в условиях реального мира требует не только визуальной информации, но и тактильного восприятия. В данной работе представлена платформа ‘UniVTAC: A Unified Simulation Platform for Visuo-Tactile Manipulation Data Generation, Learning, and Benchmarking’ — унифицированная симуляционная среда для генерации данных, обучения моделей и проведения сравнительного анализа в области визуально-тактильного манипулирования. Разработанный подход, включающий симулятор UniVTAC, энкодер UniVTAC Encoder и бенчмарк UniVTAC Benchmark, демонстрирует повышение точности выполнения задач на 17.1% в симуляции и 25% в реальных условиях. Сможет ли UniVTAC стать стандартом для разработки и оценки алгоритмов тактильного манипулирования, способствуя созданию более надежных и адаптивных роботов?
Проблема Надежной Роботизированной Манипуляции
Традиционные подходы к манипулированию роботами часто опираются на детальные модели окружающей среды и объектов. Однако, в реальных, динамично меняющихся условиях, эти модели оказываются хрупкими и ненадёжными. Небольшие отклонения от идеальной модели — будь то незначительное смещение объекта, изменение его текстуры или непредсказанное воздействие внешней силы — могут привести к серьёзным ошибкам и срыву операции. Вместо адаптации к неточностям, робот, полагающийся на жесткие модели, часто оказывается неспособным выполнить задачу, требуя идеальных условий, которые редко встречаются за пределами лабораторных стен. Эта проблема особенно актуальна в задачах, где требуется взаимодействие с деформируемыми объектами или в ситуациях, когда необходимо учитывать сложные физические взаимодействия.
Достижение надежной работы роботов-манипуляторов требует эффективной интеграции зрительной и тактильной информации, что представляет собой сложную задачу. В то время как зрение позволяет роботу идентифицировать объекты и планировать действия, тактильные датчики предоставляют критически важную обратную связь о силе контакта, текстуре поверхности и стабильности захвата. Проблема заключается в том, что эти два потока информации часто противоречивы или неполны, особенно в условиях динамичной окружающей среды и неопределенности, характерных для реального мира. Эффективное объединение этих модальностей требует разработки сложных алгоритмов, способных обрабатывать шумные данные, компенсировать задержки и разрешать конфликты между зрительными и тактильными ощущениями, что позволит роботу адаптироваться к неожиданным изменениям и выполнять манипуляции с высокой точностью и надежностью.
Современные методы обучения роботов манипулированию объектами сталкиваются с существенной проблемой обобщения тактильных навыков. Роботы, успешно овладевшие захватом и перемещением предмета с определенной текстурой и жесткостью, часто демонстрируют значительное снижение эффективности при работе с объектами, отличающимися по своим свойствам. Это связано с тем, что текущие алгоритмы, как правило, переобучаются на конкретный набор условий, не учитывая вариативность, свойственную реальному миру. Например, робот, обученный захватывать гладкий керамический предмет, может испытывать трудности с удержанием шершавой деревянной детали или предмета, покрытого тонким слоем жидкости. Преодоление этой проблемы требует разработки более гибких и адаптивных тактильных систем, способных эффективно извлекать и использовать информацию о свойствах объекта и условиях контакта, чтобы обеспечить надежное манипулирование в широком спектре сценариев.

UniVTAC: Платформа Моделирования для Обучения Тактильному Управлению
UniVTAC представляет собой новую платформу моделирования, разработанную для создания масштабных и разнообразных наборов данных для задач визуально-тактильного управления роботами. В отличие от сбора данных в реальном мире, который требует значительных временных и финансовых затрат, UniVTAC позволяет генерировать синтетические данные, имитирующие взаимодействие робота с различными объектами. Это достигается за счет использования физически достоверного рендеринга и современных средств межпроцессного взаимодействия, что обеспечивает возможность масштабирования и гибкость в настройке сценариев моделирования. Генерируемые наборы данных предназначены для обучения и оценки алгоритмов, использующих как визуальную, так и тактильную информацию для точного и надежного манипулирования объектами.
В основе UniVTAC лежит физически достоверный рендерер TacEx, предназначенный для генерации реалистичной тактильной обратной связи. TacEx моделирует взаимодействие объектов с датчиками, учитывая физические свойства материалов и геометрию поверхностей. Для обеспечения высокой производительности и масштабируемости, система использует современную библиотеку межпроцессного взаимодействия (IPC), позволяющую эффективно распределять вычислительные задачи между различными процессами и ядрами процессора. Данный подход позволяет генерировать большие объемы тактильных данных с высокой степенью реализма и в приемлемые сроки.
Фреймворк UniVTAC обеспечивает синтез данных путем моделирования взаимодействий с объектами с использованием как датчиков GelSight, так и ViTai. Это позволяет пользователям выбирать наиболее подходящий тип датчика для конкретной задачи или проводить исследования, сравнивающие эффективность различных сенсорных технологий. Симуляция взаимодействия с объектами осуществляется для обоих типов датчиков, генерируя данные, представляющие собой изображения и показания силы/тактильного контакта, которые затем используются для обучения и оценки алгоритмов роботизированного манипулирования.
Генерация данных в симуляции позволяет преодолеть ограничения, связанные со сбором тактильных данных в реальном мире. Сбор реальных данных требует значительных временных затрат на физическую настройку, проведение экспериментов и ручную аннотацию, что делает процесс дорогостоящим и трудоемким. Использование симуляции позволяет создавать большие объемы разнообразных данных с контролируемыми параметрами и автоматической аннотацией, существенно снижая стоимость и время разработки алгоритмов тактильного обучения для роботов.
Изучение Надежных Тактильных Представлений с Использованием UniVTAC Encoder
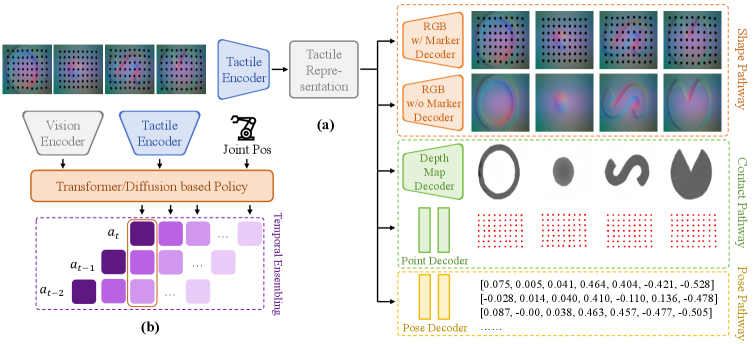
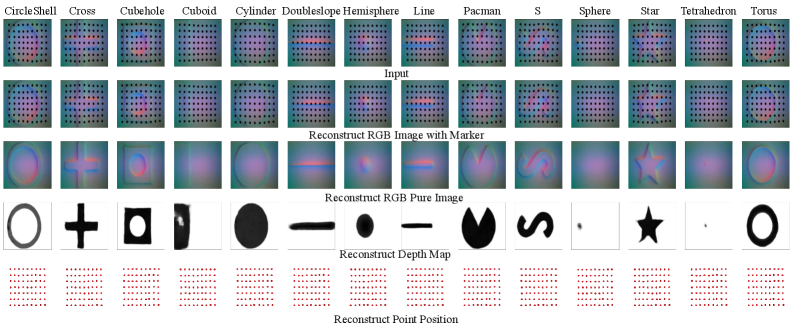
UniVTAC Encoder представляет собой предварительно обученную модель, предназначенную для изучения тактильных представлений на основе симулированных данных. Она способна захватывать информацию о форме объекта, характере контакта и его положении в пространстве (поза). Модель использует данные, полученные от тактильных датчиков, для формирования векторных представлений, кодирующих эти три ключевые характеристики. Предварительное обучение на большом объеме симулированных данных позволяет модели эффективно обобщать полученные знания и адаптироваться к новым, ранее не встречавшимся ситуациям, что критически важно для задач манипулирования объектами.
Для повышения обобщающей способности энкодера UniVTAC используется многозадачное обучение. Этот подход позволяет модели одновременно решать несколько задач, что способствует извлечению более устойчивых и универсальных признаков. В процессе обучения энкодеру предъявляются различные манипуляционные задачи, что позволяет ему адаптироваться к широкому спектру условий и улучшить производительность в новых, ранее не встречавшихся сценариях. Использование многозадачности позволяет модели эффективно использовать данные и избегать переобучения на конкретной задаче, что является критически важным для успешной работы в реальных условиях.
В архитектуре кодировщика UniVTAC используются Action Chunking Transformers (ACT) для предсказания последовательностей действий, что позволяет достичь 48.0% успешности на бенчмарке UniVTAC. Этот показатель значительно превосходит результаты, полученные с использованием только визуальной информации (30.9%), что демонстрирует эффективность подхода, основанного на предсказании действий для обучения тактильных представлений. ACT позволяют кодировщику моделировать динамику взаимодействия с объектами, улучшая способность к обобщению и решению задач манипулирования.
В процессе обучения энкодера UniVTAC используется функция потерь реконструкции (Reconstruction Loss), направленная на обеспечение точного восстановления входных данных. Данный подход позволяет энкодеру не только извлекать полезные признаки из тактильных сигналов, но и сохранять информацию о входных данных в процессе кодирования. Минимизация ошибки реконструкции способствует обучению более качественных и информативных представлений, что положительно сказывается на производительности энкодера в задачах манипулирования и распознавания объектов. Использование Reconstruction Loss выступает в качестве регуляризатора, предотвращая переобучение и улучшая обобщающую способность модели.
Оценка Тактильных Политик с Использованием Бенчмарка UniVTAC
Комплекс UniVTAC представляет собой строгую оценочную платформу, включающую в себя восемь задач, требующих ловких действий с использованием как визуальной, так и тактильной информации. Этот бенчмарк предназначен для всесторонней проверки и сравнения различных политик управления, основанных на тактильных ощущениях, позволяя выявить их сильные и слабые стороны в сложных сценариях манипулирования объектами. Каждая задача тщательно разработана для оценки способности агента адаптироваться к различным условиям, таким как неопределенность в расположении объектов, изменчивость текстур и необходимость точной координации движений. Использование восьми разнообразных задач обеспечивает надежную и полную оценку эффективности алгоритмов в реальных условиях, что делает UniVTAC ценным инструментом для исследователей в области робототехники и искусственного интеллекта.
Бенчмарк UniVTAC предоставляет уникальную возможность для всестороннего сопоставления различных тактильных политик управления роботами-манипуляторами. Благодаря тщательно разработанному набору задач, он позволяет выявить сильные и слабые стороны каждого подхода, предоставляя количественные показатели эффективности. Такой систематический анализ критически важен для продвижения исследований в области тактильного управления, поскольку позволяет разработчикам точно определить области, требующие улучшения, и сосредоточить усилия на создании более надежных и универсальных систем. Оценка на базе UniVTAC способствует объективному сравнению различных алгоритмов и стимулирует появление новых, более совершенных решений в области робототехники.
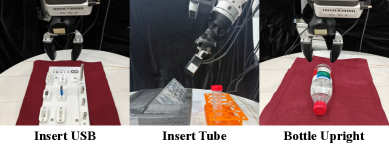
Исследования, проведённые на базе эталонного набора UniVTAC, подтвердили высокую эффективность предложенного подхода к управлению тактильными манипуляциями. В ходе экспериментов зафиксировано среднее увеличение успешности выполнения задач на 25% по трем ключевым сценариям: вставке USB-устройства, вставке трубки и установке бутылки в вертикальное положение. Особенно заметный прогресс достигнут при выполнении задачи по вставке USB — успешность увеличилась на 30%, что свидетельствует о способности системы адаптироваться к различным условиям и обеспечивает надёжную работу в реальных условиях.
В ходе тестирования разработанного фреймворка на реальных устройствах были зафиксированы значительные улучшения в успехе выполнения задач, требующих тактильного взаимодействия. В частности, при вставке USB-накопителя наблюдалось увеличение успешности на 30%, для задачи вставки трубки — на 10%, а при установке бутылки в вертикальное положение — на 35%. Эти результаты демонстрируют не только универсальность предложенного подхода, но и его потенциал для успешного переноса обученных моделей из симуляции в реальный мир, открывая новые возможности для автоматизации сложных манипуляций.
Платформа UniVTAC, представленная в данной работе, стремится к созданию целостной системы для генерации данных и обучения тактильного восприятия. Она подчеркивает важность понимания взаимосвязей между визуальной и тактильной информацией для успешной манипуляции роботов. В этом контексте, замечание Пола Эрдеша — «Математика — это искусство видеть невидимое» — приобретает особую актуальность. Ведь создание реалистичной симуляции, способной генерировать данные, необходимые для обучения роботов, требует способности увидеть и смоделировать сложные взаимодействия в контактных средах, которые не всегда очевидны. Как и в математике, успех в создании такой системы зависит от способности видеть скрытые закономерности и связи между различными параметрами.
Что Дальше?
Представленная платформа UniVTAC, безусловно, является шагом вперёд в создании синтетических данных для обучения манипуляций, однако не стоит забывать о фундаментальной сложности проблемы переноса знаний из симуляции в реальность. Каждая новая зависимость от реалистичности симуляции — это скрытая цена свободы от непредсказуемости реального мира. Очевидно, что совершенствование визуального и тактильного реализма — это лишь часть решения. Более глубокое понимание того, как робот строит внутреннюю модель мира и адаптируется к неожиданностям, остаётся ключевой задачей.
Структура представления тактильной информации, как и архитектура самого симулятора, определяет поведение системы в целом. Попытки создать универсальный benchmark неизбежно сталкиваются с проблемой ограниченности и упрощения реальных сценариев. Будущие исследования должны сосредоточиться на разработке методов, позволяющих роботам самостоятельно расширять свои знания и адаптироваться к новым, непредсказуемым ситуациям, а не полагаться исключительно на предопределённые наборы данных.
В конечном итоге, успех в области визуально-тактильных манипуляций будет зависеть не только от совершенствования симуляторов и алгоритмов, но и от более глубокого понимания принципов, лежащих в основе осязания и моторики живых существ. Упрощение — необходимое условие моделирования, но игнорирование сложности — это путь к иллюзорным результатам.
Оригинал статьи: https://arxiv.org/pdf/2602.10093.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Canon EOS 80D
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
- IdeaPad Slim 3 15IRH10R ОБЗОР
- Понимание предпочтений: новая модель для персонализированных рекомендаций
- TCL NxtPaper 70 Pro ОБЗОР: объёмный накопитель, удобный сенсор отпечатков, большой аккумулятор
- Рекомендации нового поколения: объединяя визуальное и текстовое
- Рост облигаций и геополитика: что ждет инвесторов в апреле? (08.04.2026 17:32)
2026-02-12 03:15