Автор: Денис Аветисян
Новая система тактильного восприятия, основанная на машинном зрении, позволяет двуногим роботам лучше чувствовать поверхность и удерживать равновесие.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"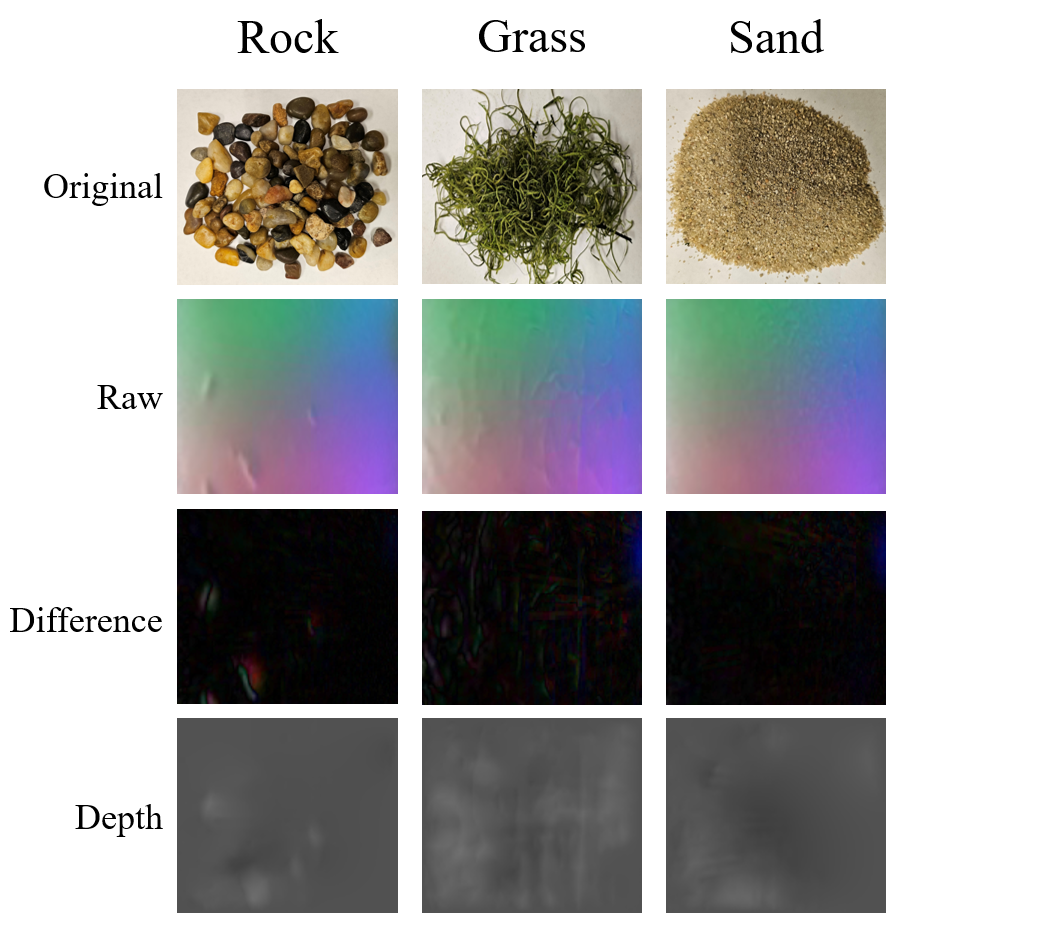
В статье представлена система тактильного восприятия на основе машинного зрения, интегрированная в стопы двуногого робота, для оценки контакта, контроля баланса и классификации местности.
Обеспечение устойчивости и адаптивности двуногих роботов в реальных условиях остается сложной задачей, требующей точного восприятия взаимодействия с окружающей средой. В данной работе, посвященной ‘Soft Surfaced Vision-Based Tactile Sensing for Bipedal Robot Applications’, представлена новая система тактильного зондирования на основе мягкой поверхности и машинного зрения, интегрированная в стопы робота. Разработанный подход позволяет в реальном времени оценивать позу контакта, силы сдвига, центр давления и классифицировать тип поверхности, значительно улучшая контроль баланса и осведомленность о местности. Может ли подобная интеграция тактильного восприятия стать ключевым шагом на пути к созданию более гибких и интеллектуальных систем локомоции?
Динамический Баланс: Вызов для Двуногих Роботов
Обеспечение устойчивого передвижения двуногих роботов представляет собой сложную задачу, особенно в условиях неровной или неизвестной местности. В отличие от передвижения по ровной поверхности, столкновение с неровностями, уклонами или неожиданными препятствиями требует от робота постоянной адаптации и быстрой корректировки положения тела. Традиционные методы управления балансом часто оказываются неэффективными, поскольку полагаются на предварительное моделирование окружающей среды или жестко запрограммированные последовательности действий. Это ограничивает способность робота реагировать на непредвиденные ситуации и поддерживать устойчивость в динамически меняющихся условиях, что критически важно для практического применения роботов в реальном мире — от помощи в спасательных операциях до навигации в городских условиях.
Традиционные методы управления балансом у двуногих роботов зачастую опираются на точные математические модели и обширное предварительное программирование, что существенно ограничивает их способность адаптироваться к изменяющимся условиям. Вместо того чтобы позволить роботу самостоятельно учиться поддерживать равновесие, разработчики вынуждены детально описывать поведение робота в различных ситуациях, предугадывая все возможные возмущения и особенности местности. Такой подход требует значительных усилий по калибровке и точной настройке, а также плохо масштабируется при переходе к новым, более сложным условиям эксплуатации. В результате, робот, разработанный для идеальной лабораторной среды, может оказаться неспособным эффективно функционировать в реальном мире с его непредсказуемостью и разнообразием.
Традиционные методы управления равновесием у двуногих роботов часто демонстрируют уязвимость к внешним возмущениям и требуют предельной точности калибровки. Любое отклонение от идеальных условий — неровности поверхности, внезапный толчок или даже незначительное изменение нагрузки — может привести к потере устойчивости и падению. Эта чувствительность обусловлена зависимостью от заранее определенных моделей и параметров, которые редко полностью соответствуют реальным условиям эксплуатации. В результате, роботы, разработанные с использованием подобных подходов, испытывают значительные трудности при работе в неструктурированной среде, что серьезно ограничивает их практическое применение и требует постоянного контроля и корректировки.
Визуально-Тактильное Восприятие для Оценки Поверхности
В роботизированных системах для обеспечения устойчивости и навигации по сложной местности используется визуально-тактильный сенсор GelSight, интегрированный в стопы робота. Данный сенсор позволяет получать детальную информацию о контакте с поверхностью, необходимую для оценки характеристик грунта и адаптации походки. GelSight представляет собой мягкую силиконовую подушку, контактирующую с поверхностью, и камеру, фиксирующую деформацию подушки. Полученные данные служат основой для реконструкции трехмерной геометрии поверхности и определения параметров контакта, что позволяет роботу эффективно взаимодействовать с окружающей средой.
Датчик основан на использовании мягкой силиконовой подушечки, которая обеспечивает конформность к неровностям поверхности. Встроенная камера фиксирует деформацию подушечки при контакте с поверхностью. Затем, используя данные с камеры, система реконструирует трехмерную геометрию поверхности, позволяя получить детальное представление о форме и текстуре грунта, с которым контактирует робот. Такая комбинация материалов и оптической системы обеспечивает получение информации о микрорельефе поверхности, недоступной для традиционных датчиков.
Для обеспечения надежного восприятия глубины и детального представления о контакте с поверхностью используется комбинация фотометрической стереометрии и нейронных сетей. Применяемый метод позволяет реконструировать трехмерную геометрию поверхности, обеспечивая высокую точность определения характеристик грунта. Система работает с частотой 25-30 Гц, что позволяет реализовать эффективный контур восприятия и управления, достаточный для оперативного реагирования робота на изменения рельефа и поддержания устойчивости.
Управление Балансом в Реальном Времени с Тактильной Обратной Связью
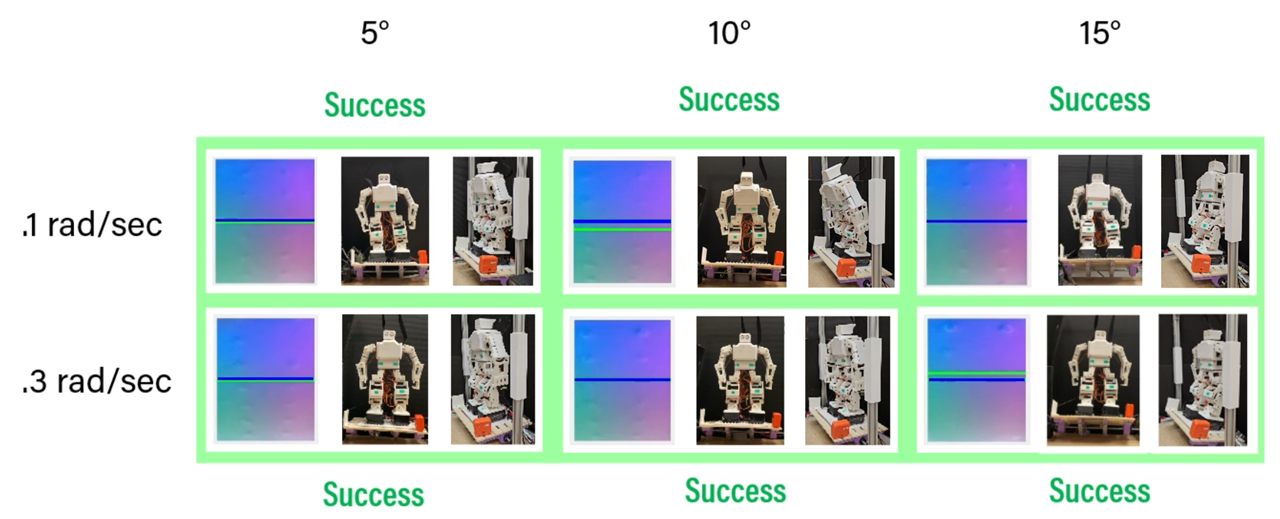
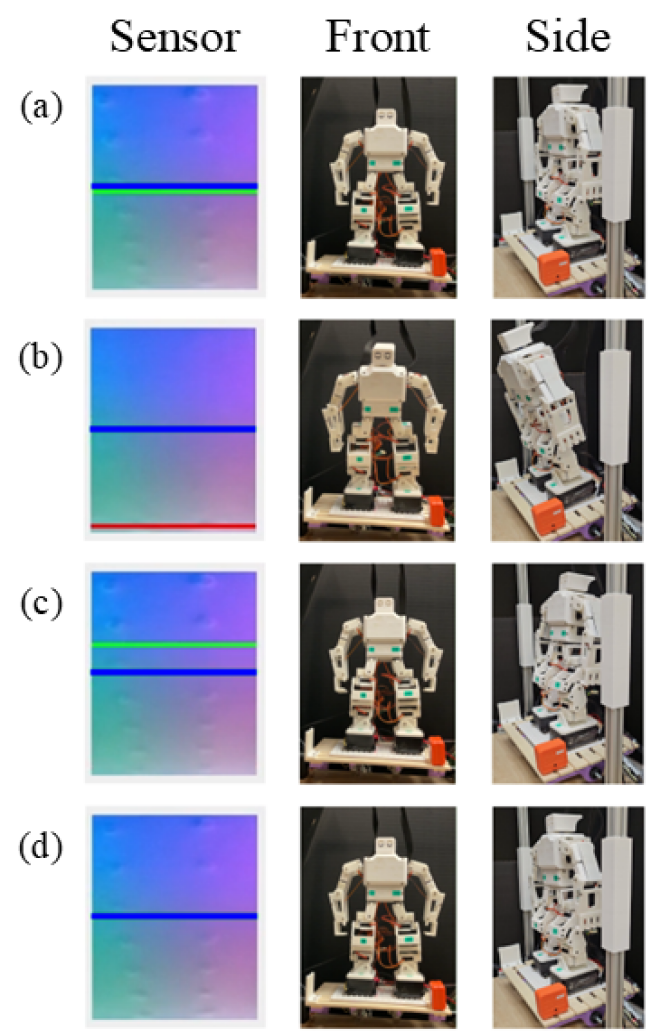
Для реализации системы управления равновесием в реальном времени использовалась замкнутая система управления, в которой данные с тактильных датчиков применяются для оценки центра давления (CoP) и обнаружения сил сдвига. CoP рассчитывается на основе распределения сил, зарегистрированных датчиками, расположенными на стопах робота. Обнаружение сил сдвига позволяет системе определять направление и величину отклонения от устойчивого положения. Эти данные служат входными сигналами для регулятора, обеспечивая активную коррекцию нарушений равновесия и поддержание стабильности платформы. Применяемый метод позволяет точно определять положение CoP и оперативно реагировать на внешние возмущения.
Для активной коррекции нарушений равновесия и поддержания стабильности система использует ПИД-регулятор, который корректирует углы наклона голеностопного сустава на основе данных о смещении центра давления и силах трения. Оценка полной задержки контура управления составляет менее 50 мс, что обеспечивает быструю реакцию на отклонения и минимизирует риск потери равновесия. Алгоритм ПИД-регулирования непрерывно оценивает отклонение от целевого положения и генерирует управляющий сигнал для сервоприводов голеностопного сустава, обеспечивая динамическую стабилизацию.
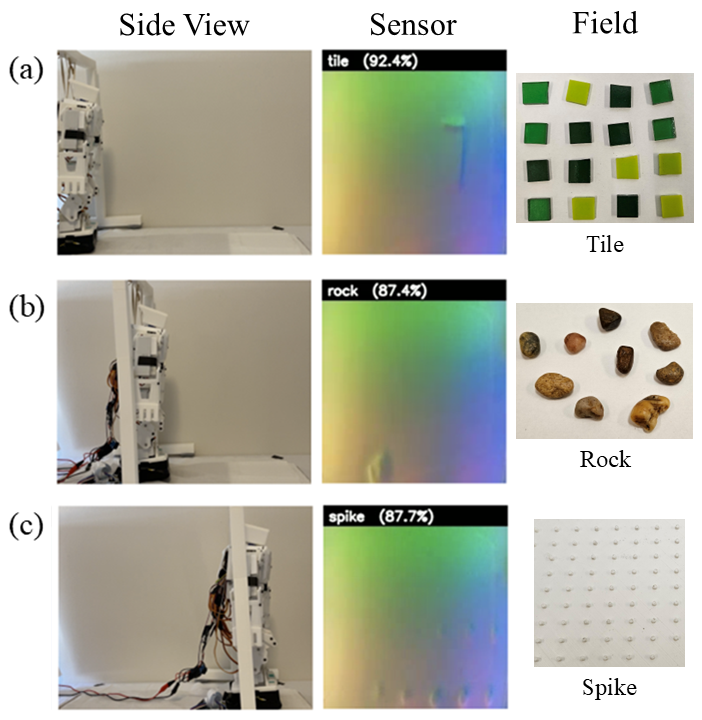
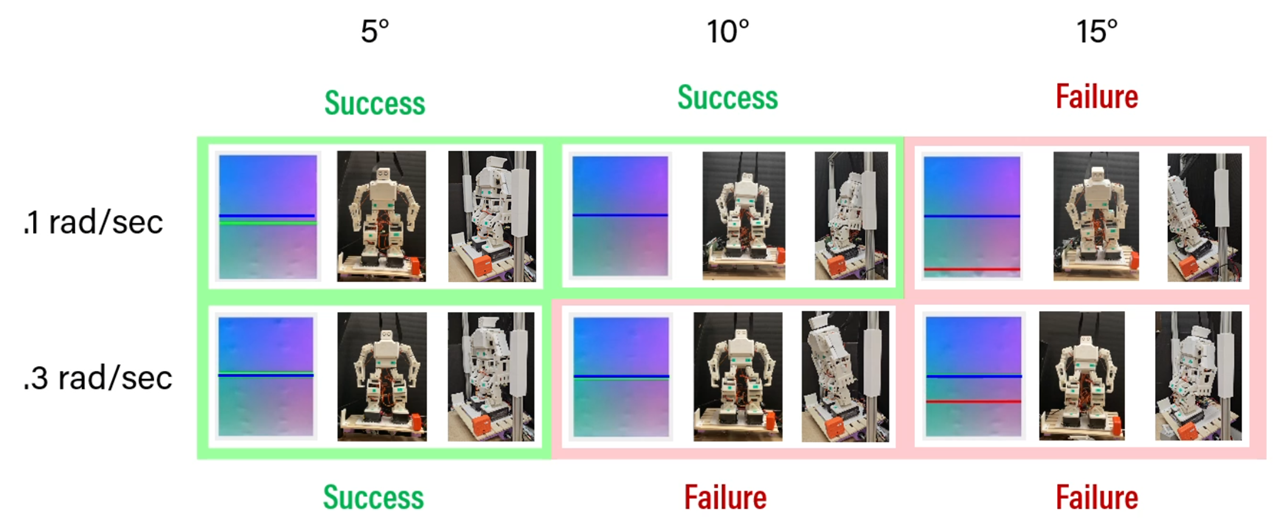
Для адаптации к различным типам поверхности была интегрирована система классификации местности, использующая нейронную сеть ResNet-50. Данная система позволяет определять тип грунта с точностью более 85%, даже в условиях ограниченной видимости. Классифицированный тип поверхности используется для динамической корректировки параметров управления, что позволяет оптимизировать устойчивость и эффективность движения. В ходе испытаний система, использующая классификацию местности, продемонстрировала превосходящие результаты по сравнению с системой управления в открытом цикле, обеспечивая более стабильное и надежное передвижение по различным типам поверхностей.
Значение для Надежной и Адаптивной Робототехники
Система, объединяющая тактильные датчики и интеллектуальное управление, демонстрирует значительное улучшение устойчивости роботов на неровных и неизвестных поверхностях. Благодаря способности регистрировать контакт с окружающей средой и мгновенно адаптировать стратегию поддержания равновесия, робот способен преодолевать препятствия и сохранять стабильность даже в условиях непредсказуемой местности. Это достигается за счет непрерывного анализа данных, поступающих от тактильных сенсоров, и оперативной корректировки моментов и углов наклона, что позволяет эффективно компенсировать внешние возмущения и избегать падений. Подобный подход открывает возможности для создания роботов, способных к автономной навигации в сложных и динамичных средах, например, при проведении спасательных операций или исследовании труднодоступных местностей.
В отличие от традиционных робототехнических систем, функционирующих на основе заранее запрограммированных моделей поведения, представленный подход обеспечивает динамическую реакцию робота на внешние возмущения. Это достигается за счет интеграции тактильных датчиков и интеллектуальных алгоритмов управления, позволяющих роботу адаптироваться к неожиданным изменениям окружающей среды в реальном времени. Вместо жесткого следования заданным траекториям, система способна самостоятельно корректировать движения, поддерживая устойчивость и продолжая выполнение задачи даже при наличии непредсказуемых сил или неровностей поверхности. Такая адаптивность значительно повышает надежность и универсальность робота, позволяя ему функционировать в сложных и изменчивых условиях, где заранее запрограммированные стратегии оказываются неэффективными.
Робототехническая платформа Hash Humanoid Robot V3 успешно продемонстрировала практическую реализацию концепций адаптивного управления и тактильного восприятия. Этот гуманоидный робот, благодаря своей конструкции и интегрированным сенсорам, позволил проверить эффективность предложенных алгоритмов в реальных условиях, включая передвижение по неровной и неизвестной местности. Полученные результаты не только подтвердили возможность динамической реакции робота на внешние возмущения, но и показали потенциал для создания более универсальных и устойчивых робототехнических систем, способных к автономной работе в сложных и непредсказуемых средах. Разработка и успешное тестирование на Hash Humanoid Robot V3 открывают перспективы для применения подобных технологий в широком спектре задач, от поисково-спасательных операций до промышленной автоматизации и помощи человеку.
Представленная работа демонстрирует стремление к созданию систем, способных адаптироваться к изменчивости окружающей среды. Подобно тому, как время испытывает любую конструкцию, так и система тактильного восприятия, интегрированная в двуногого робота, подвергается постоянным проверкам на прочность в реальных условиях. Блез Паскаль однажды заметил: «Все великие вещи начинаются с малого». И действительно, точное определение геометрии контакта и классификация поверхности — кажущиеся незначительными детали, — являются фундаментом для обеспечения стабильности и управляемости робота. Очевидно, что развитие подобных систем требует постоянного рефакторинга и совершенствования, чтобы они могли достойно стареть, сохраняя свою функциональность и надежность даже в сложных условиях эксплуатации.
Куда Ведет Эта Мягкость?
Представленная работа, безусловно, демонстрирует потенциал визуально-тактильного восприятия в контексте двуногой робототехники. Однако, следует признать, что интеграция сенсоров — лишь первый шаг. Истинная сложность заключается не в сборе данных о контакте, а в интерпретации этой информации в реальном времени, особенно учитывая неизбежную неопределенность и шум, присущие любой сенсорной системе. Упрощение задачи классификации поверхностей, несомненно, облегчает текущую реализацию, но не решает фундаментальной проблемы: как робот должен реагировать на совершенно новые, непредвиденные типы поверхностей, и как он будет справляться с постепенным старением сенсоров и изменением их характеристик?
Представляется, что будущее исследований лежит в области адаптивного обучения и робастного оценивания. Система, полагающаяся на жестко запрограммированные модели, рано или поздно столкнется с ситуацией, к которой она не готова. Более перспективным представляется подход, основанный на постоянном обучении и самокоррекции, где «технический долг» системы рассматривается не как ошибка, а как ее память, как накопленный опыт взаимодействия с миром.
В конечном счете, создание действительно «чувствительного» робота требует не только разработки новых сенсоров, но и глубокого понимания того, как информация о контакте влияет на всю систему управления, и как эта информация может быть использована для создания более гибкого, надежного и адаптивного поведения. Ведь время — не метрика, а среда, в которой любая система неизбежно претерпевает изменения.
Оригинал статьи: https://arxiv.org/pdf/2602.18638.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок в зоне турбулентности: рубль, ставки и новые риски (10.04.2026 01:32)
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Canon EOS 80D
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
- Как использовать режимы съёмки P, S, A, M на фотоаппарате?
- Honor X80i ОБЗОР: плавный интерфейс, большой аккумулятор, объёмный накопитель
- Proton только что запустил альтернативу Google Workspace и Microsoft 365, ориентированную на конфиденциальность.
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- IdeaPad Slim 3 15IRH10R ОБЗОР
2026-02-24 13:18