Автор: Денис Аветисян
Новая разработка позволяет роботам идентифицировать материал объекта прямо во время манипуляций, расширяя возможности для автоматизации сложных задач.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"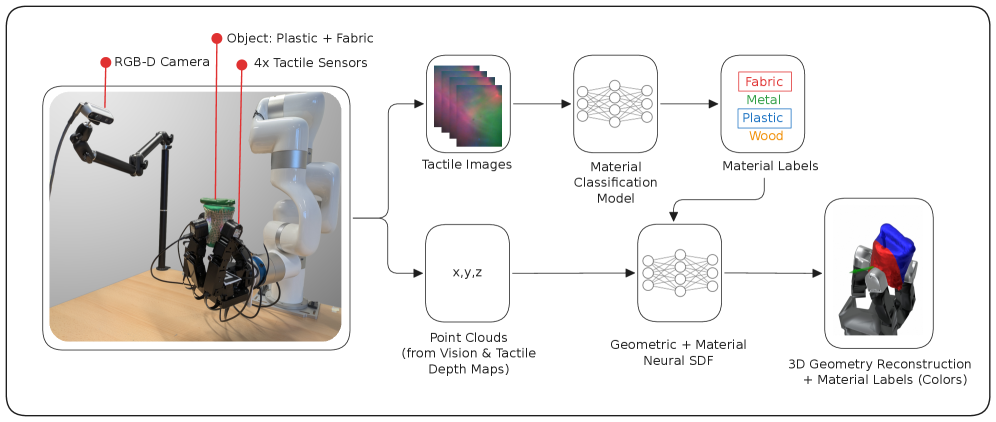
В статье представлена система семантической разметки объектов на основе тактильных датчиков и нейронных неявных представлений, обеспечивающая классификацию материалов в процессе захвата и манипулирования.
По мере интеграции роботов в повседневную жизнь, их способность воспринимать не только форму, но и свойства объектов в процессе манипулирования становится критически важной. В данной работе представлена система ‘SemanticFeels: Semantic Labeling during In-Hand Manipulation’, расширяющая фреймворк NeuralFeels для интеграции семантической разметки с представлением неявной геометрии, основанным на визуальной и тактильной информации. Предложенный подход демонстрирует высокую точность классификации материалов, достигающую 79.87% в ходе многократных манипуляций с многокомпонентными объектами, и позволяет роботам «чувствовать» и понимать свойства объектов в реальном времени. Сможет ли такая система обеспечить более адаптивное и интеллектуальное поведение роботов в сложных сценариях взаимодействия с окружающим миром?
Постижение Осязания: Ключ к Ловкости Роботов
Для достижения человеческого уровня ловкости роботам необходимо не просто обнаруживать наличие объекта, но и «ощущать» его так, как это делает человек. Это подразумевает распознавание не только формы, но и материальных свойств — твердость, текстуру, упругость. Восприятие этих характеристик позволяет роботу адаптироваться к различным объектам и выполнять сложные манипуляции, такие как захват хрупкого предмета без повреждений или надежный удержание скользкого инструмента. Понимание материала объекта позволяет предсказывать его реакцию на приложенное усилие, что критически важно для точных и деликатных действий, недоступных системам, полагающимся лишь на информацию о присутствии или форме.
Традиционные тактильные сенсоры, несмотря на свою распространенность, часто оказываются недостаточными для обеспечения надежного захвата и манипулирования объектами. Их ограниченное разрешение не позволяет различать тонкие текстуры и формы, что затрудняет идентификацию объекта и выбор оптимальной стратегии захвата. Более того, эти сенсоры, как правило, предоставляют лишь сырые данные о давлении, не интерпретируя их в понятные для робота сведения о материальных свойствах — твердость, скользкость, упругость. В результате, робот испытывает трудности при работе с объектами различной формы и материала, что снижает эффективность и надежность выполнения задач, требующих тонкой моторики и адаптации к изменяющимся условиям. Повышение разрешения и внедрение алгоритмов семантической интерпретации тактильных данных является ключевой задачей для создания роботов, способных к полноценному взаимодействию с окружающим миром.
Современные методы роботизированного осязания сталкиваются с серьезными трудностями при одновременной обработке визуальной и тактильной информации. Это ограничивает способность роботов адаптироваться к незнакомым предметам и окружающей среде. Несмотря на успехи в разработке отдельных сенсоров, их интеграция в единую систему, способную к комплексному восприятию, остается сложной задачей. Роботы часто не могут правильно интерпретировать визуальные данные о форме и материале объекта, сопоставляя их с тактильными ощущениями при контакте. В результате, манипуляции с новыми предметами могут быть неуклюжими или невозможными, поскольку отсутствует способность к быстрому обучению и адаптации на основе мультисенсорного опыта. Разработка алгоритмов, способных эффективно объединять визуальную и тактильную информацию, является ключевым шагом к созданию действительно ловких и универсальных роботов.
Визуально-Тактильное Восприятие: Новый Подход к Осязанию
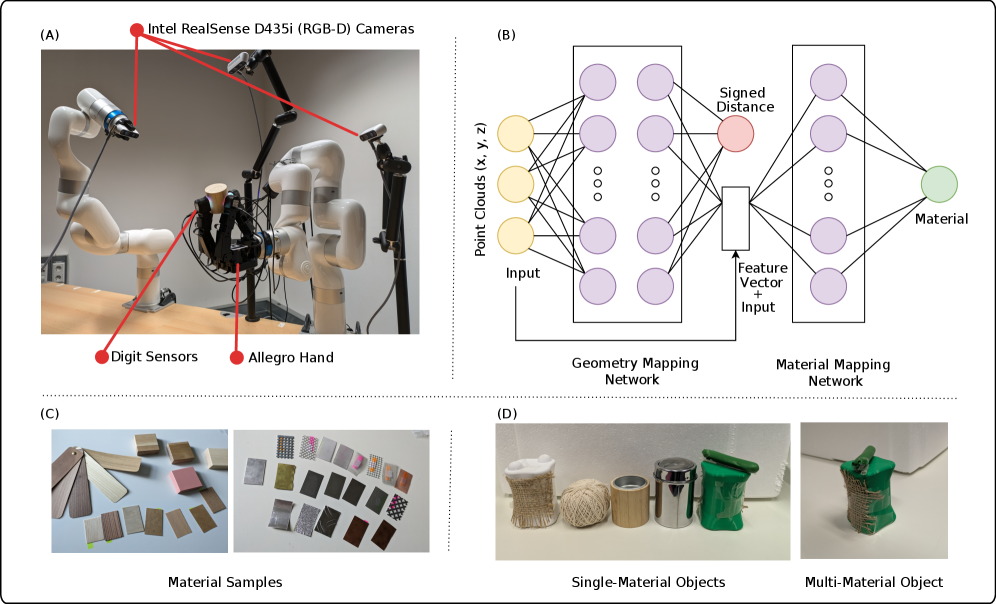
Визуально-тактильные сенсоры, такие как Digit Sensor, обеспечивают высокое разрешение и позволяют получать детальную информацию о текстуре поверхности. В отличие от традиционных тактильных датчиков, которые предоставляют дискретные данные о контакте, эти сенсоры формируют изображения поверхности, что позволяет различать мельчайшие детали. Это достигается за счет использования высокоплотных массивов камер и алгоритмов обработки изображений, которые преобразуют визуальную информацию в тактильные данные. Разрешение, обеспечиваемое этими сенсорами, значительно превосходит возможности традиционных датчиков, что открывает новые возможности для распознавания объектов, оценки их свойств и управления манипуляциями.
Комбинирование данных, полученных с использованием визуальных и тактильных сенсоров, позволяет выходить за рамки простого определения факта контакта и переходить к определению материальных свойств объекта. В отличие от традиционных тактильных сенсоров, которые предоставляют информацию только о наличии и силе давления, интеграция визуальных данных, таких как текстура и цвет, позволяет системе идентифицировать материал объекта — например, различать металл, пластик или ткань. Это достигается путем сопоставления тактильных ощущений с визуальной информацией, что позволяет создавать более полную и точную картину объекта и его свойств, расширяя возможности манипулирования и взаимодействия робота с окружающей средой.
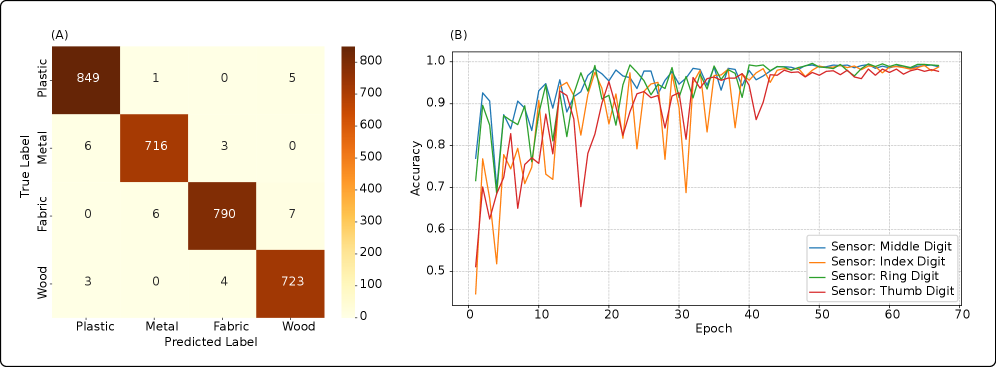
Система NeuralFeels представляет собой фреймворк, предназначенный для оценки позы и формы объектов на основе комбинации тактильных и визуальных данных, что критически важно для манипуляций в руке. Реализованная в рамках NeuralFeels классификация тактильных изображений продемонстрировала точность 98.88% на независимом тестовом наборе данных. Данный результат подтверждает эффективность предложенного подхода к интеграции мультисенсорной информации для решения задач, связанных с восприятием и управлением объектами в робототехнике.
Использование семантических меток, полученных на основе комбинированного анализа тактильных и визуальных данных, позволяет создавать системы захвата объектов, способные к целенаправленному и стабильному удержанию. Данный подход позволяет не просто определить факт контакта, но и идентифицировать тип объекта и его оптимальную точку захвата, что критически важно для сложных манипуляций. Применение семантических меток повышает надежность захвата, особенно в условиях неопределенности или при работе с объектами сложной формы, поскольку система способна адаптироваться к изменениям в окружающей среде и корректировать захват для обеспечения стабильности.
Кодирование Геометрии с Помощью Нейронных Полей
Нейронные поля, в частности Neural Radiance Fields (NeRF), представляют собой эффективный способ кодирования 3D-геометрии, отличный от традиционных дискретных представлений, таких как сетки или облака точек. Вместо хранения дискретных данных, NeRF используют многослойный перцептрон (MLP) для отображения 3D-координат и направления взгляда в цвет и плотность. Это позволяет непрерывно представлять геометрию и визуализировать сложные сцены с высоким качеством рендеринга. В отличие от дискретных методов, NeRF обеспечивают бесконечное разрешение и позволяют эффективно хранить сложные сцены, требуя значительно меньше памяти для хранения геометрии, чем традиционные методы. Непрерывное представление также упрощает операции, такие как изменение масштаба и вращение, поскольку они выполняются как преобразования координат в пространстве, а не как манипуляции с отдельными полигонами или точками.
Нейронные поля подписанного расстояния (SDF) предоставляют способ представления поверхностей объектов в виде непрерывной функции, где значение функции указывает на расстояние до ближайшей точки поверхности, причем знак указывает, находится ли точка внутри или снаружи объекта. Эффективная реализация SDF достигается за счет использования методов, таких как HashGrid, который разбивает пространство на ячейки для ускорения запросов, и кодирования сферическими гармониками, позволяющего компактно представлять функции SDF в частотной области. Эти методы позволяют создавать высокодетализированные представления геометрии с относительно небольшим количеством параметров, что критически важно для приложений, требующих высокой производительности и масштабируемости, например, в робототехнике и компьютерной графике.
Интеграция полей с знаком расстояния (SDF) с тактильными данными позволяет роботам формировать детальное представление о форме и поверхностных свойствах объектов, даже во время контакта. Использование SDF обеспечивает представление поверхности объекта, а тактильные сенсоры предоставляют информацию о локальных характеристиках поверхности, таких как текстура и жесткость. Объединение этих данных позволяет роботу не только определить геометрию объекта, но и получить представление о его физических свойствах, что критически важно для манипулирования и взаимодействия с объектами в реальном времени. Это особенно полезно в ситуациях, когда визуальная информация ограничена или недоступна, например, при работе в условиях низкой освещенности или при манипулировании скрытыми объектами.
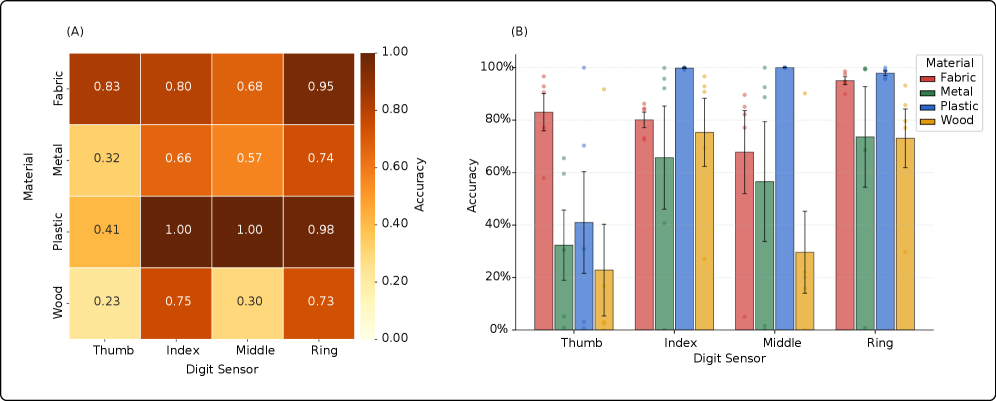
В ходе тестирования различных сенсоров для определения формы и свойств объектов, кольцевой сенсор продемонстрировал наивысшую точность классификации, составив 99.60% среди всех протестированных моделей. Данный результат указывает на превосходство кольцевой конструкции в задачах распознавания объектов и определения их геометрии по сравнению с альтернативными сенсорными системами, используемыми в робототехнике и компьютерном зрении.
Семантическое Понимание для Адаптивного Захвата
Семантическая разметка позволяет роботам распознавать материалы и функциональное назначение объектов, что открывает возможности для более точных и устойчивых захватов. Вместо слепого применения силы, робот, оснащенный такой системой, способен определить, например, хрупкость стекла или мягкость ткани, и скорректировать стратегию захвата соответствующим образом. Это достигается за счет анализа данных, полученных с тактильных датчиков и систем 3D-реконструкции, позволяя роботу “понимать”, как лучше всего удержать предмет, избегая повреждений или случайного выскальзывания. Таким образом, семантическая разметка превращает робота из простого манипулятора в интеллектуального помощника, способного к адаптивному и безопасному взаимодействию с окружающим миром.
Для обеспечения надежного распознавания объектов и адаптации стратегии захвата используются современные методы семантической сегментации тактильных данных. В частности, полносвязные сети FCN позволяют эффективно классифицировать каждый пиксель тактильного изображения, определяя материал и функциональное назначение объекта. Более сложные архитектуры, такие как Mask\ R-CNN, способны не только классифицировать, но и точно выделять границы объектов на тактильном изображении, что особенно важно для манипуляций в сложных условиях. Подход SemanticFusion объединяет информацию из различных сенсоров — тактильных, визуальных и 3D-реконструкции — для создания полной и достоверной семантической карты объекта, значительно повышая устойчивость и точность захвата.
Интеграция семантического понимания с тактильными датчиками и трехмерной реконструкцией позволяет роботам адаптировать стратегии захвата, основываясь на воспринимаемых свойствах объекта. Роботизированные системы, оснащенные подобными возможностями, способны не просто определять форму и размеры предмета, но и распознавать материал, из которого он изготовлен, а также предполагаемое назначение. Это позволяет им выбирать оптимальный тип захвата — например, более деликатный для хрупких предметов или более сильный для тяжелых. Благодаря сочетанию визуальной информации, тактильных ощущений и семантического анализа, робот может динамически корректировать силу и положение пальцев, обеспечивая надежный и стабильный захват даже для объектов сложной формы или неизвестных свойств. Такой подход значительно повышает эффективность и универсальность роботизированных систем в различных сферах применения, от автоматизации производства до помощи в быту.
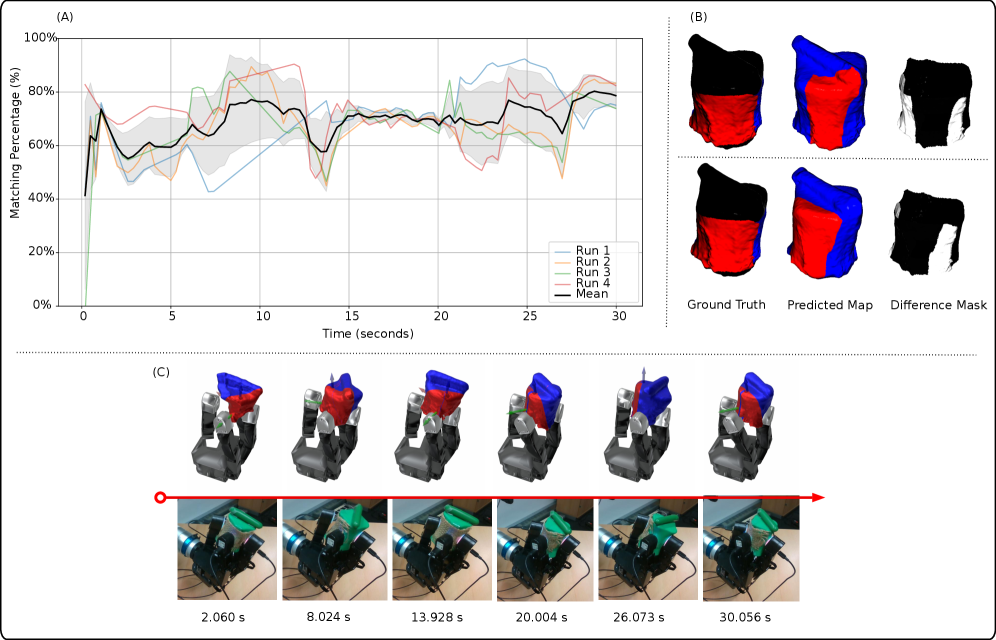
В ходе многократных экспериментов по манипулированию объектами, разработанная система продемонстрировала высокую точность сопоставления карт материалов — в среднем 79.87%. Этот показатель отражает способность системы надежно определять материал объекта, что критически важно для адаптации стратегии захвата. Небольшое стандартное отклонение в 4.41% указывает на стабильность работы системы и ее устойчивость к незначительным вариациям в данных, полученных от тактильных сенсоров и 3D-реконструкции. Полученные результаты свидетельствуют о значительном прогрессе в области семантического понимания для адаптивного захвата, открывая новые возможности для робототехники и автоматизации.
К Надежным и Интеллектуальным Роботизированным Рукам
Рука Allegro, управляемая алгоритмами обучения с подкреплением, такими как HORA, представляет собой доступную платформу для внедрения передовых технологий тактильного восприятия и манипулирования. В отличие от дорогостоящих промышленных роботов, Allegro позволяет исследователям и разработчикам экспериментировать с сложными алгоритмами, не требуя значительных финансовых вложений. Это особенно важно для развития искусственного интеллекта в области робототехники, поскольку позволяет более широкому кругу специалистов участвовать в создании и тестировании новых решений. Низкая стоимость и гибкость конструкции делают Allegro привлекательным инструментом для изучения возможностей роботов в реальных условиях, открывая перспективы для создания более адаптивных и интеллектуальных систем.
Исследования в области пространственно-временных моделей внимания (STAM) направлены на существенное повышение точности классификации материалов роботами. Вместо обработки всего потока тактильных данных, STAM позволяет системе фокусироваться исключительно на наиболее релевантных участках и моментах времени, что значительно снижает вычислительную нагрузку и повышает эффективность анализа. Данный подход имитирует способность человека концентрироваться на ключевых ощущениях при определении материала объекта, игнорируя несущественные детали. За счет динамического выделения важных пространственных областей и временных интервалов, STAM позволяет роботам более точно идентифицировать текстуру, жесткость и другие свойства материалов, открывая новые возможности для сложных манипуляций и взаимодействий с окружающим миром.
Разработка передовых роботизированных рук направлена на создание не просто устройств, способных захватывать предметы, но и систем, обладающих способностью к их пониманию. Объединяя достижения в области обучения с подкреплением и моделей пространственно-временного внимания, становится возможным формирование у роботов способности классифицировать материалы и адаптировать захват к их свойствам. Это открывает перспективы для выполнения сложных задач, требующих тонкой моторики и понимания физических характеристик объектов, позволяя роботам взаимодействовать с окружающим миром более осмысленно и эффективно, что приближает их к выполнению широкого спектра работ в различных сферах — от производства и логистики до медицины и помощи людям.
В ходе четвертого этапа испытаний роботизированной руки Allegro была достигнута рекордная точность распознавания материалов — 85.12%. Этот результат демонстрирует значительный прогресс в области тактильного восприятия и манипулирования объектами роботами. Достигнутая точность указывает на эффективность используемых алгоритмов, в частности, методов обучения с подкреплением, и открывает перспективы для создания роботов, способных не просто захватывать предметы, но и определять их свойства, что критически важно для выполнения сложных задач и взаимодействия с окружающим миром.
Исследование, представленное в данной работе, демонстрирует стремление к математической чистоте в области робототехники. Авторы предлагают систему, способную классифицировать материалы объектов, с которыми манипулирует робот, опираясь на тактильные ощущения и нейронные сети. Этот подход, позволяющий роботу ‘понимать’ свойства объектов, требует строгости и доказуемости алгоритмов. Как однажды заметил Кен Томпсон: «Простота — это высшая степень утончённости». В контексте семантической разметки во время манипуляции, это означает, что элегантное решение должно не просто работать, но и быть понятным и доказуемым с математической точки зрения. Сложность нейронных сетей не должна скрывать базовые инварианты, определяющие классификацию материалов, а наоборот — раскрывать их.
Что Дальше?
Представленная работа, безусловно, демонстрирует прогресс в области тактильного восприятия и семантической маркировки объектов при манипуляциях. Однако, стоит признать, что корректность классификации материала, основанная исключительно на данных с тактильных сенсоров, остается проблемой, требующей строгого математического обоснования. Текущие решения, демонстрирующие работоспособность на тестовых наборах данных, не гарантируют устойчивость в условиях непредсказуемости реального мира. Доказательство корректности алгоритма, а не просто демонстрация его эффективности, представляется более важной задачей.
Перспективным направлением представляется интеграция тактильного восприятия с другими модальностями — зрительным и слуховым восприятием. Создание единой, когерентной модели мира, основанной на строгих математических принципах, позволит роботу не просто идентифицировать материал, но и предсказывать его поведение. Следует также обратить внимание на разработку алгоритмов, способных к самообучению и адаптации к новым, ранее не встречавшимся материалам, без необходимости переобучения всей модели.
В конечном итоге, истинный прогресс в этой области будет достигнут не за счет увеличения объема данных или сложности нейронных сетей, а за счет разработки элегантных и доказуемо корректных алгоритмов, основанных на фундаментальных принципах физики и математики. В противном случае, мы рискуем создать лишь очередную сложную систему, работающую “достаточно хорошо”, но лишенную истинной надежности и предсказуемости.
Оригинал статьи: https://arxiv.org/pdf/2602.14099.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Нейросети как посредники: этика и границы взаимодействия с разумом
- Неважно, на что вы фотографируете!
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Калькулятор глубины резкости. Как рассчитать ГРИП.
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- vivo iQOO Z11 Turbo ОБЗОР: огромный накопитель, отличная камера, много памяти
- MSI Katana 17 HX B14WGK ОБЗОР
- Как правильно фотографировать ночью
- Что такое глубина резкости в фотографии?
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
2026-02-17 12:59