Автор: Денис Аветисян
Новая система позволяет удаленно управлять объектами и процессами, интерпретируя голосовые команды в контексте общего 3D-пространства.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"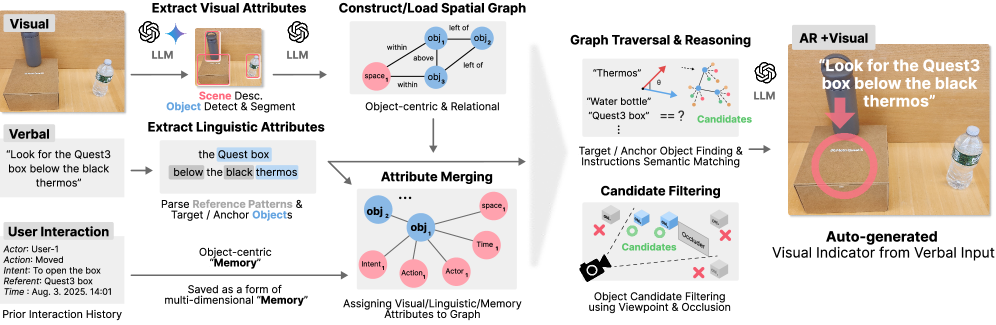
Исследование представляет систему Speech-to-Spatial, использующую обработку естественного языка и дополненную реальность для повышения ясности и эффективности удаленной помощи посредством привязки устных ссылок к объектно-ориентированному графу.
Несмотря на растущую популярность удаленной помощи, вербальные инструкции часто оказываются неоднозначными и требуют уточнений. В данной работе, представленной статьей ‘From Speech-to-Spatial: Grounding Utterances on A Live Shared View with Augmented Reality’, предлагается система Speech-to-Spatial, преобразующая голосовые указания в пространственно-ориентированные AR-подсказки. Система использует объектно-ориентированный граф для интерпретации речевых обращений и визуализации целевых объектов, повышая эффективность и снижая когнитивную нагрузку при удаленной поддержке. Возможно ли создание полностью иммерсивных систем удаленной помощи, основанных на естественном языке и дополненной реальности, обеспечивающих интуитивно понятное взаимодействие в реальном времени?
От слов к делу: Преодоление разрыва между речью и пространственным пониманием
Традиционные системы удаленной помощи зачастую сталкиваются с проблемой неточности из-за использования расплывчатых и неоднозначных словесных инструкций. В сложных задачах, требующих высокой точности исполнения, такие неясности могут приводить к ошибкам, снижению эффективности и увеличению временных затрат. Например, фразы вроде «немного левее» или «приблизительно там» лишены конкретики, необходимой для точного выполнения действий, особенно в ситуациях, где требуется взаимодействие с физическим окружением. Это особенно критично в задачах, требующих манипулирования объектами или навигации в пространстве, где нечеткие указания могут привести к повреждению оборудования или неверному выполнению операции. Поэтому разработка систем, способных интерпретировать язык с высокой точностью и преобразовывать его в конкретные действия, является ключевой задачей для повышения эффективности удаленной помощи.
Существующие методы испытывают значительные трудности при преобразовании словесных инструкций в точные указания для навигации в пространстве, особенно в динамичных помещениях. Проблема заключается в том, что вербальные описания часто не содержат достаточной информации для однозначного определения местоположения и направления движения, а существующие алгоритмы испытывают затруднения при интерпретации неоднозначных фраз и адаптации к изменяющимся условиям окружающей среды. Например, фраза «поверните налево у стола» может быть интерпретирована по-разному, если в помещении несколько столов или если расположение столов изменилось. Это приводит к ошибкам в управлении удаленными устройствами или роботами, а также снижает эффективность выполнения задач в сложных помещениях, где требуется высокая точность позиционирования и навигации.
Основная сложность в создании эффективных систем удаленной помощи заключается в точной привязке лингвистических инструкций к физическому миру и предоставлении пользователю интуитивно понятных визуальных ориентиров. Для этого необходимо, чтобы система не просто понимала слова, но и соотносила их с конкретными объектами и местоположениями в окружающей среде. Например, фраза «переместите коробку левее» требует не только понимания слов, но и определения местоположения коробки, определения направления «левее» относительно текущей позиции и предоставления визуальной подсказки, указывающей желаемое местоположение. Именно эта задача «заземления» языка в физическом пространстве, сопровождаемая адекватными визуальными сигналами, является ключевой для повышения эффективности и снижения вероятности ошибок при удаленном выполнении сложных задач.

Речь в действие: Архитектура интуитивного пространственного управления
В основе нашей системы Speech-to-Spatial лежит использование больших языковых моделей (LLM) для логического анализа и Whisper для высокоточной транскрипции голосовых инструкций. LLM применяются для понимания семантики команд, выделения ключевых объектов и действий, а Whisper обеспечивает преобразование речи в текст с минимальными ошибками. Сочетание этих технологий позволяет системе интерпретировать сложные инструкции, учитывая контекст и намерение пользователя, что критически важно для точной пространственной навигации и предоставления соответствующих указаний.
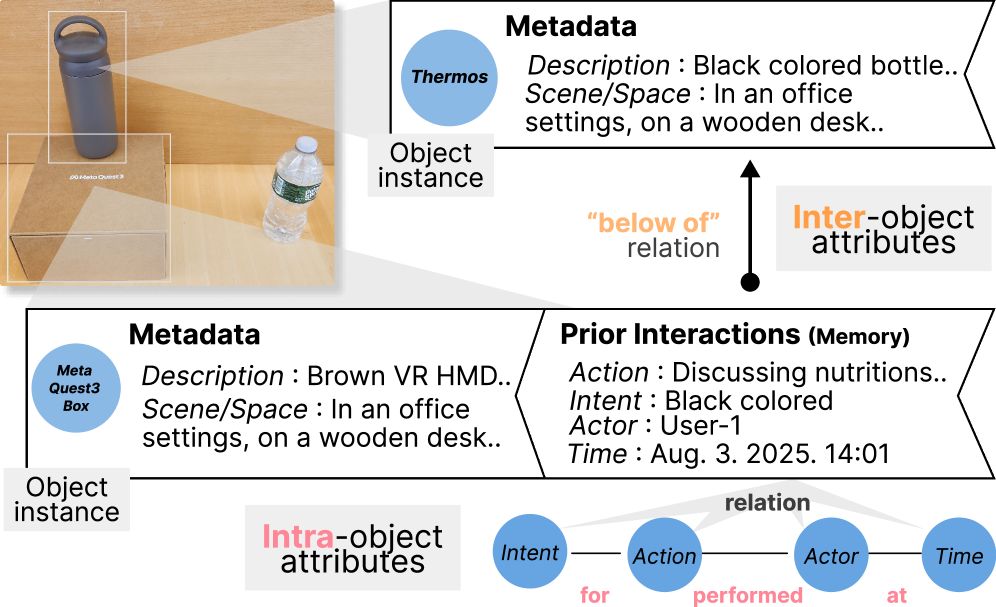
Информация, полученная в результате транскрипции и интерпретации голосовых инструкций, подвергается обработке для построения графа, ориентированного на объекты (Object-Centric Graph). Этот граф представляет собой структурированное представление окружающей среды и содержащихся в ней объектов, где узлы соответствуют объектам, а ребра — их взаимосвязям и пространственным отношениям. Построение графа позволяет системе понимать контекст инструкций относительно конкретных объектов и их расположения, что необходимо для формирования точных и интуитивно понятных пространственных указаний. Структура графа включает информацию о типе объекта, его размере, форме, а также о его положении и ориентации в пространстве, что позволяет системе эффективно обрабатывать сложные инструкции и адаптироваться к динамически меняющейся обстановке.
Для создания динамического представления окружения пользователя, система использует модель Gemini для обнаружения и сегментации объектов. Gemini позволяет идентифицировать объекты в поле зрения пользователя и точно определить их границы, что необходимо для построения трехмерной модели окружения. Этот процесс включает в себя не только классификацию объектов (например, стул, стол, дверь), но и выделение их контуров на изображениях, получаемых с камеры устройства. Полученные данные о расположении и форме объектов служат основой для последующей визуальной навигации и предоставления пользователю пространственных инструкций.
В рамках системы «Speech-to-Spatial» для визуального сопровождения используются AR-индикаторы, отображаемые на устройстве Meta Quest3. Эти индикаторы формируются на основе обработанных голосовых команд и данных об окружающей среде, полученных посредством объектно-центрированного графа и Gemini. Визуальные подсказки предназначены для обеспечения четкой и лаконичной пространственной навигации, указывая пользователю направление и местоположение целевых объектов или точек интереса непосредственно в поле зрения, что обеспечивает интуитивно понятное руководство без необходимости постоянного обращения к звуковым инструкциям.
Контекст имеет значение: Стратегии привязки для устойчивого управления
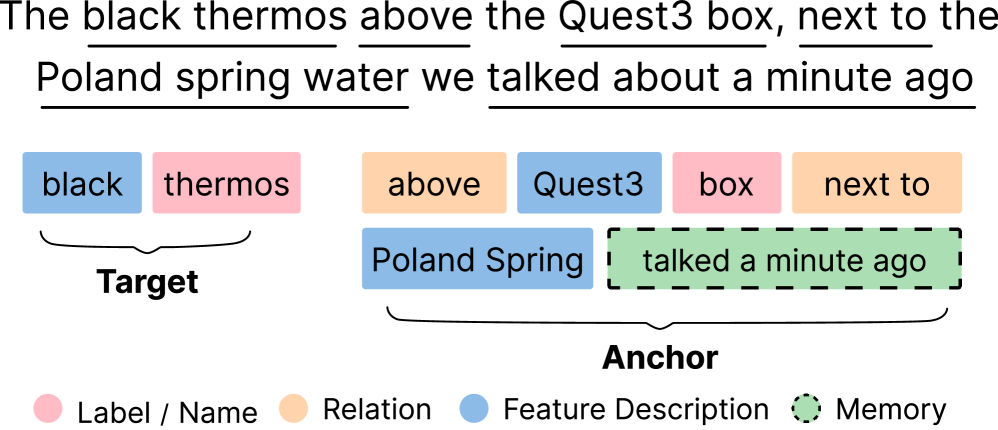
В рамках системы реализована поддержка различных стратегий пространственной привязки, включающих прямую привязку к объектам (Direct Feature Referencing), реляционную привязку, основанную на взаимосвязях между объектами (Relational Referencing), привязку на основе запоминания ранее указанных объектов (Memory-Based Referencing) и цепную привязку, позволяющую последовательно указывать объекты для построения маршрута (Chained Referencing). Эти стратегии обеспечивают гибкость в предоставлении инструкций, позволяя системе адаптироваться к различным сценариям и уровням детализации в зависимости от контекста и потребностей пользователя.
Система адаптирует стратегию взаимодействия и предоставления инструкций в зависимости от стиля коммуникации пользователя и сложности окружающей среды. Это достигается за счет динамического выбора оптимального подхода к пространственной привязке и ссылочным стратегиям, что позволяет обеспечить наиболее понятное и интуитивное руководство в различных ситуациях. Учитываются как текущий контекст, так и особенности взаимодействия с пользователем, что повышает эффективность и удобство использования системы в разнообразных условиях и при различных уровнях зашумленности окружения.
Комбинирование различных стратегий пространственной привязки позволяет системе эффективно разрешать неоднозначности и предоставлять контекстно-зависимые инструкции даже в сложных и динамичных окружениях. Использование нескольких подходов — прямой привязки к объектам, реляционной привязки, привязки на основе памяти и цепочечной привязки — обеспечивает устойчивость к зашумленности и изменениям в окружающей среде. Система способна определять наиболее релевантный метод привязки в конкретной ситуации, что позволяет точно указывать на объекты или места, даже если они частично скрыты или перемещаются, минимизируя риск ошибок в навигации и повышая эффективность взаимодействия с пользователем.
Система использует данные о предыдущих взаимодействиях и общую историю для повышения ясности и эффективности предоставляемых указаний. Анализ предыдущих запросов, действий пользователя и контекста ситуации позволяет системе адаптировать будущие рекомендации, избегая повторения информации и фокусируясь на наиболее релевантных деталях. Сохранение и использование информации о предпочтениях пользователя и ранее выполненных задачах позволяет системе формировать более точные и персонализированные инструкции, снижая вероятность недопонимания и оптимизируя процесс выполнения задач. Это особенно важно в динамичных средах, где контекст постоянно меняется, и быстрое предоставление актуальной информации критически важно.
За пределами теории: Влияние и перспективы применения
Предлагаемая платформа открывает новые возможности для удаленной помощи при выполнении сложных задач, значительно снижая вероятность ошибок и повышая общую эффективность. Система позволяет экспертам оказывать поддержку в режиме реального времени, направляя действия исполнителей и предоставляя необходимые инструкции. Это достигается за счет интеграции передовых алгоритмов обработки данных и визуализации, обеспечивающих четкое и понятное представление информации. В результате, удаленная помощь становится не просто инструментом поддержки, а полноценным средством повышения производительности и качества выполняемых работ, особенно в тех случаях, когда непосредственное присутствие эксперта затруднено или невозможно.
Данная разработка открывает новые горизонты в области удаленного технического обслуживания, позволяя экспертам дистанционно направлять персонал, находящийся непосредственно на объекте, с беспрецедентной точностью. Вместо традиционных инструкций, зачастую сложны для восприятия и подвержены ошибкам, система обеспечивает визуальную и контекстуально-зависимую поддержку, значительно упрощая сложные процедуры. Это позволяет решать технические проблемы быстрее и эффективнее, минимизируя риск дорогостоящих ошибок и простоев оборудования. Возможность удаленной поддержки позволяет привлекать высококвалифицированных специалистов из любой точки мира, обеспечивая доступ к экспертным знаниям даже в самых отдаленных или труднодоступных местах, что особенно ценно для предприятий, работающих с критически важным оборудованием.
Данная разработанная структура находит применение и в сфере навигации внутри помещений, обеспечивая интуитивное и контекстно-зависимое сопровождение в сложных внутренних пространствах. В отличие от традиционных систем, полагающихся на простые указания, предложенный подход позволяет учитывать текущую обстановку и предоставлять пользователю наиболее релевантные инструкции для достижения цели. Это особенно важно в больших зданиях, таких как торговые центры, больницы или промышленные комплексы, где ориентироваться может быть затруднительно. Система способна адаптироваться к изменениям в окружающей среде, например, к временным препятствиям или перестановке объектов, что гарантирует точность и эффективность навигации. Таким образом, предложенное решение открывает возможности для создания более удобных и безопасных внутренних пространств, повышая общую производительность и улучшая пользовательский опыт.
Исследования показали заметное ускорение выполнения задач при использовании разработанной системы. Время, затрачиваемое на задачу «Поиск», сократилось до 3,25 секунд, что на 1,08 секунды быстрее, чем при использовании исключительно аудио-инструкций (4,33 секунды). Ещё более значительный прирост эффективности наблюдается при выполнении задачи «Перемещение», где система позволила сократить время выполнения до 6,33 секунд, в то время как с использованием только аудио-инструкций требовалось 9,31 секунды. Данные результаты демонстрируют, что предложенный подход существенно повышает скорость и эффективность выполнения задач, особенно в ситуациях, требующих высокой точности и оперативности.
Система демонстрирует высокую точность выполнения задач, достигая 0.998 для задач определения местоположения и 0.731 для задач перемещения. Особенно заметно улучшение в задачах перемещения, где точность выросла с 0.644 при использовании только аудио-инструкций до 0.731, что свидетельствует о значительном повышении эффективности и надежности системы в сложных сценариях. Такая высокая точность позволяет существенно снизить вероятность ошибок и повысить общую производительность, делая систему ценным инструментом для широкого спектра применений, требующих высокой степени надежности и точности выполнения задач.
Исследования показали значительное снижение воспринимаемой сложности выполнения задач, связанных с перемещением, до 33.06 единиц, по сравнению с 46.53 единицами при использовании исключительно голосовых инструкций. Это указывает на то, что разработанная система значительно облегчает процесс навигации и выполнения задач для пользователя. Более того, система продемонстрировала высокий уровень успешности — 77.8% — в обработке запросов пользователей, что свидетельствует о ее способности эффективно понимать намерения и предоставлять релевантную помощь. Такой результат подтверждает, что предложенный подход не только сокращает время выполнения задач, но и делает их более интуитивно понятными и доступными для широкого круга пользователей.
Предложенная система отличается высокой адаптивностью и масштабируемостью, что делает её применимой в широком спектре областей. Отлаженная архитектура позволяет легко интегрировать её в существующие промышленные процессы, например, для удаленного технического обслуживания оборудования, где эксперты могут дистанционно направлять персонал на месте с высокой точностью. Помимо промышленного сектора, система открывает новые возможности в сфере потребительских услуг, предоставляя интуитивно понятную навигацию в сложных помещениях, таких как торговые центры или аэропорты, а также оказывая помощь в решении бытовых задач. Способность системы эффективно обрабатывать пользовательские запросы и адаптироваться к различным сценариям использования делает её универсальным инструментом, способным повысить эффективность и удобство в самых разнообразных областях применения.
Работа демонстрирует, что даже самые элегантные алгоритмы обработки естественного языка бесполезны, если нет чёткой привязки к реальному миру. Система «Speech-to-Spatial», связывая устную инструкцию с трёхмерным графом объектов, пытается решить проблему, которую многие игнорируют — контекст. Линус Торвальдс как-то заметил: «Разработчики обычно тратят больше времени на споры о стандартах, чем на написание кода». Здесь та же история: бесконечные дебаты о семантике и синтаксисе бессмысленны, если система не может однозначно идентифицировать, о каком именно объекте идёт речь в дополненной реальности. В конечном итоге, как и во всём, важна практическая реализация, а не теоретическая красота.
Что дальше?
Представленная работа, безусловно, элегантна в своей попытке привязать ускользающие слова к неподатливым объектам. Однако, за каждым успешно задеплоенным указанием в дополненной реальности неизбежно скрывается ещё десяток, которые споткнутся о неточности распознавания, неоднозначность речи или, что более вероятно, о прихоти продакшена. Каждый объектно-ориентированный граф рано или поздно столкнётся с объектом, который система просто не сможет понять.
Перспективы кажутся очевидными: усиление внимания к робастности алгоритмов, способных справляться с шумом и неполнотой данных. Но, как показывает опыт, любая абстракция умирает от продакшена. Вероятно, следующим шагом станет интеграция с более широким контекстом — понимание намерений пользователя, предвидение его действий. Но и это лишь отсрочит неизбежное.
В конечном счете, система, способная безупречно интерпретировать естественный язык в динамической 3D-среде, остаётся мечтой. И это хорошо. Ведь красиво умирающие мечты — тоже своего рода прогресс. Всё, что можно задеплоить — однажды упадёт. Это не повод не строить, а просто напоминание о бренности всего сущего.
Оригинал статьи: https://arxiv.org/pdf/2602.03059.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Рынок в ожидании ставки: что ждет рубль, нефть и акции? (20.03.2026 01:32)
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- vivo S50 Pro mini ОБЗОР: объёмный накопитель, портретная/зум камера, большой аккумулятор
- Космос в деталях: Навигация по астрономическим данным на иммерсивных дисплеях
- Cubot Note 60 ОБЗОР: плавный интерфейс, большой аккумулятор
- Искусственные мозговые сигналы: новый горизонт интерфейсов «мозг-компьютер»
- Неважно, на что вы фотографируете!
- vivo Y05 ОБЗОР: удобный сенсор отпечатков, плавный интерфейс, яркий экран
- Infinix GT 20 Pro ОБЗОР: замедленная съёмка видео, тонкие рамки, большой аккумулятор
- Как обновить очки XREAL на ПК, Android и с помощью Beam
2026-02-04 16:53