Автор: Денис Аветисян
Новая методика позволяет создавать правдоподобные 3D-сцены, где люди взаимодействуют с объектами, основываясь на их функциональном назначении и физических свойствах.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"
Представлен FunHSI — фреймворк, генерирующий реалистичные и функционально корректные взаимодействия человека и 3D-сцены без дополнительного обучения, за счет анализа функциональных возможностей объектов и установления корректного физического контакта.
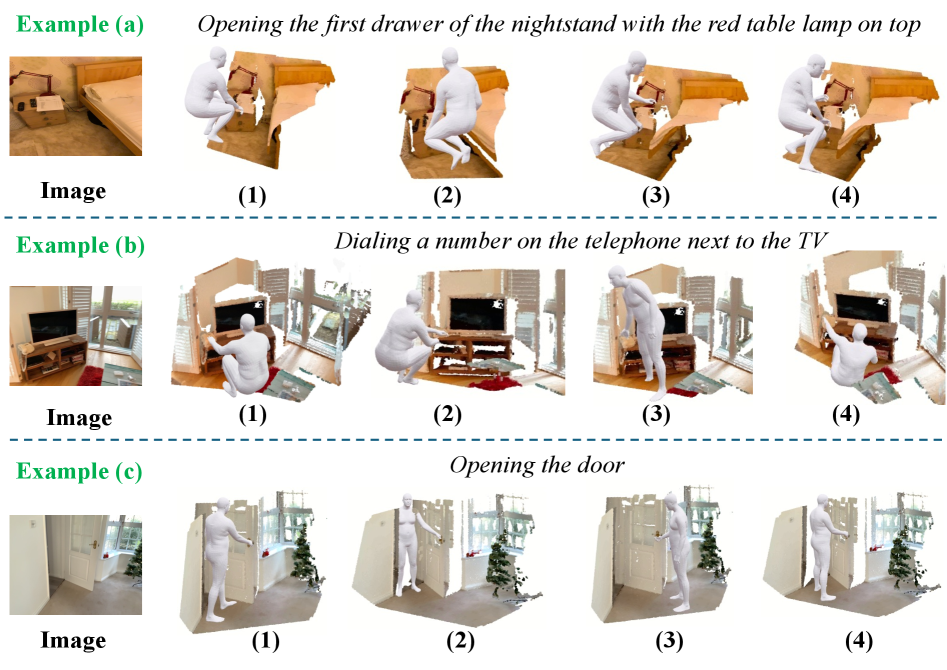
Несмотря на значительный прогресс в области компьютерного зрения и искусственного интеллекта, создание реалистичных и функционально обоснованных взаимодействий между 3D-моделями людей и окружающими их объектами остается сложной задачей. В данной работе, посвященной ‘Open-Vocabulary Functional 3D Human-Scene Interaction Generation’, предлагается новый подход к генерации таких взаимодействий, основанный на анализе функциональных возможностей объектов и установлении корректных физических контактов. Предложенная система FunHSI позволяет генерировать правдоподобные 3D-сцены, где люди выполняют заданные действия, такие как «увеличение температуры в комнате», без необходимости предварительного обучения. Какие перспективы открываются для использования подобных технологий в создании интерактивного контента и разработке систем искусственного интеллекта, способных к осмысленному взаимодействию с окружающим миром?
Погоня за Реализмом: Синтез Правдоподобного Взаимодействия Человека с Окружающей Средой
Создание правдоподобного взаимодействия человека с окружающей средой имеет решающее значение для развития таких областей, как робототехника и виртуальная реальность, однако представляет собой сложную задачу. Достижение реалистичности требует не просто визуального соответствия, но и точного моделирования физических и логических аспектов взаимодействия. Неспособность обеспечить достоверное взаимодействие может приводить к эффекту “зловещей долины”, когда даже незначительные несоответствия вызывают дискомфорт и отторжение у пользователя. Поэтому, разработка методов, позволяющих создавать убедительные и естественные взаимодействия, является ключевым направлением современных исследований и открывает новые возможности для создания более интуитивных и эффективных систем взаимодействия человека с машиной.
Существующие методы генерации взаимодействий человека с окружающей средой часто сталкиваются с трудностями в достижении одновременно физической правдоподобности и семантической осмысленности. Многие алгоритмы, хоть и способны создать визуально приемлемые движения, не учитывают тонкие нюансы физики, что приводит к неестественным или даже невозможным сценариям. Более того, им часто не хватает понимания контекста и намерений человека, что выражается в бессмысленных или нелогичных действиях. В результате, созданные взаимодействия кажутся искусственными и лишены реалистичности, что существенно ограничивает их применимость в таких областях, как робототехника и виртуальная реальность, где требуется убедительное и правдоподобное поведение.
Основная сложность в создании реалистичных взаимодействий заключается в способности системы логически оценивать функциональное назначение объектов и определять наиболее подходящие точки контакта. Для того чтобы робот или виртуальный аватар могли, например, правильно взять кружку за ручку, а не за дно, необходимо не просто распознать объект, но и понять, как он предназначен для использования. Это требует сложных алгоритмов, способных моделировать физические свойства объектов, прогнозировать последствия различных действий и выбирать оптимальные стратегии взаимодействия, учитывая как физическую осуществимость, так и семантическую значимость. Именно эта способность к рассуждению о функциональности и контактах является критическим барьером на пути к созданию по-настоящему правдоподобных и естественных взаимодействий между человеком и машиной.
FunHSI: Рамки для Интеллектуального Синтеза Взаимодействий
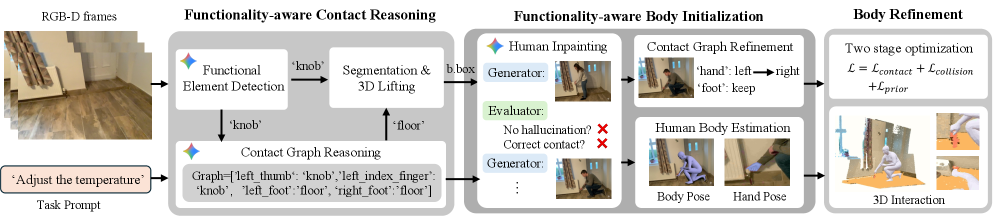
В основе FunHSI лежит использование больших языковых моделей (LLM), таких как GPT-4o, для генерации графа контактов, который описывает взаимосвязи между человеком и элементами сцены. Этот граф представляет собой структурированное описание физических взаимодействий: какие объекты касаются друг друга, какие объекты находятся в пределах досягаемости человека, и какие объекты могут быть задействованы в потенциальных действиях. LLM анализирует визуальную информацию и семантическое описание сцены для определения этих связей, кодируя их в виде узлов (объекты) и ребер (контакты). Генерация графа контактов является ключевым этапом, поскольку он служит основой для последующего планирования и синтеза правдоподобных взаимодействий человека с окружающей средой.
В рамках FunHSI для выполнения ключевых задач, таких как идентификация функциональных элементов сцены и первоначальная оценка позы человека, используются мультимодальные модели «зрение-язык», в частности Gemini. Процесс начальной оценки позы человека реализуется посредством технологии image inpainting, позволяющей восстанавливать скрытые или невидимые части изображения и, таким образом, более точно определять положение и ориентацию человека в пространстве. Идентификация функциональных элементов сцены обеспечивает понимание роли каждого объекта и его потенциального взаимодействия с человеком, что необходимо для синтеза правдоподобных взаимодействий.
Для точной реконструкции 3D-сцены и позы человека из визуальных данных, FunHSI использует геометрическое обоснование посредством методов GeoCalib и MapAnything. GeoCalib выполняет калибровку геометрии сцены, определяя относительное положение объектов и камеры, что необходимо для точного позиционирования. MapAnything, в свою очередь, позволяет сопоставлять визуальные данные с трехмерным пространством, обеспечивая точное определение координат и ориентации объектов и человека в сцене. Комбинация этих методов позволяет FunHSI создавать достоверные и геометрически корректные представления взаимодействия человека и окружения, необходимые для синтеза правдоподобных взаимодействий.
В основе FunHSI лежит синергия между логическим выводом, обеспечиваемым большими языковыми моделями (LLM), и геометрической реконструкцией окружающей среды. LLM анализируют сцену и действия, генерируя вероятные взаимодействия человека с объектами. Геометрическая реконструкция, использующая методы вроде GeoCalib и MapAnything, обеспечивает точное воссоздание 3D-пространства и положения человека в нём. Комбинация этих подходов позволяет FunHSI создавать разнообразные и правдоподобные сценарии взаимодействия, учитывая как логическую последовательность действий, так и физические ограничения и возможности сцены, что значительно повышает реалистичность сгенерированных взаимодействий.
Подтверждение Реализма: Валидация и Количественные Метрики
Для оценки физической корректности и семантической уместности сгенерированных взаимодействий FunHSI использует количественные метрики, такие как Non-Collision Score и Functional Contact Distance. Non-Collision Score оценивает отсутствие столкновений между агентами и сценой, представляя собой долю взаимодействий, свободных от физических конфликтов. Functional Contact Distance измеряет среднее расстояние между точками контакта между агентами и поверхностями сцены, что позволяет оценить реалистичность взаимодействия. Низкое значение Functional Contact Distance указывает на более точное и правдоподобное физическое взаимодействие, в то время как высокий Non-Collision Score свидетельствует о минимальном количестве столкновений и, следовательно, о физически корректном поведении.
Для точного выявления столкновений и расчета расстояний в FunHSI используются 3D модели человеческого тела, в частности SMPL-X и VolumetricSMPL. SMPL-X представляет собой параметрическую модель тела, позволяющую генерировать разнообразные позы и формы, сохраняя анатомическую правдоподобность. VolumetricSMPL, основанная на SMPL-X, создает воксельное представление модели, что упрощает и ускоряет вычисление пересечений с окружающей средой и другими объектами. Использование этих моделей позволяет проводить количественную оценку физической корректности генерируемых взаимодействий, обеспечивая реалистичность синтезированных сцен.
Для обеспечения анатомической правдоподобности генерируемых взаимодействий, FunHSI использует методы CameraHMR и WiLoR для точной оценки 3D-позы человека. CameraHMR (Camera-based Human Motion Recovery) позволяет восстанавливать 3D-позу на основе изображений, а WiLoR (Whole-body Localized Regression) — повышает точность оценки за счет локального регрессионного анализа. Комбинация этих подходов обеспечивает надежное определение положения суставов и ориентации тела, что критически важно для реалистичной симуляции физических взаимодействий и предотвращения анатомически невозможных поз.
Эффективность FunHSI была продемонстрирована на наборе данных SceneFun3D, являющемся стандартом для оценки методов синтеза взаимодействия человека и сцены. В ходе тестирования FunHSI достиг показателя Functional Contact Distance в 0.2968, превзойдя результаты, показанные базовыми моделями. Значение Non-Collision Score составило 0.9929, что сопоставимо с результатами, полученными при использовании базовых подходов. Данные метрики позволяют оценить физическую корректность и правдоподобность генерируемых взаимодействий в рамках данной задачи.
Оценка семантической согласованности, полученная для FunHSI, составила 0.2540. Данный показатель отражает степень соответствия сгенерированных взаимодействий между человеком и окружающей средой ожидаемым семантическим связям. Полученный результат демонстрирует сопоставимую эффективность FunHSI с существующими подходами в области синтеза взаимодействий человек-сцена, подтверждая способность системы генерировать правдоподобные и осмысленные взаимодействия в контексте заданной сцены.

Оценка Пользователями: Восприятие и Влияние
Проведенная через платформу Mechanical Turk оценка восприятия взаимодействия с использованием системы FunHSI показала, что пользователи последовательно оценивали сгенерированные ею действия как высокореалистичные и правдоподобные. Данное исследование подтверждает способность системы создавать взаимодействие, которое субъективно воспринимается людьми как естественное и соответствующее реальным сценариям. Особенно важно, что оценки, полученные в ходе пользовательского тестирования, демонстрируют устойчиво высокую степень реалистичности, что свидетельствует о потенциале FunHSI для широкого спектра приложений, где требуется правдоподобное моделирование человеческого поведения и взаимодействия с машиной.
Разработанная система успешно решает сложную задачу синтеза взаимодействия человека с окружающей средой, открывая новые возможности для различных приложений. Благодаря способности моделировать реалистичные действия и реакции, она может быть использована в робототехнике для создания более адаптивных и интуитивно понятных роботов, способных взаимодействовать с миром подобно человеку. В виртуальной реальности данная технология позволяет создавать более захватывающие и правдоподобные симуляции, повышая уровень погружения. Кроме того, система находит применение в анимации, упрощая процесс создания сложных сцен взаимодействия и позволяя аниматорам сосредоточиться на творческой составляющей. Таким образом, данное решение представляет собой значительный шаг вперед в создании более реалистичных и интерактивных цифровых сред.
В отличие от существующих подходов, система FunHSI совершила значительный прорыв, обеспечив генерацию взаимодействий на основе запросов, сформулированных произвольным языком. Это означает, что система не ограничена заранее заданными командами или сценариями, а способна адаптироваться к широкому спектру задач, описанных естественным языком. Благодаря этой гибкости, FunHSI может генерировать более разнообразные и реалистичные взаимодействия, открывая возможности для создания сложных и динамичных сцен, где поведение агентов определяется не жесткими правилами, а контекстом и поставленной задачей. Такая адаптивность существенно расширяет область применения системы, позволяя использовать ее в различных областях, от робототехники и виртуальной реальности до анимации и создания интерактивных развлечений.
Функциональное понимание объектов и способность генерировать контекстуально уместные взаимодействия делают FunHSI универсальным инструментом для создания захватывающих и интерактивных опытов. В ходе пользовательского исследования, проведенного на платформе Mechanical Turk, значительное большинство участников — 71,1% — выразили предпочтение взаимодействиям, сгенерированным FunHSI, по сравнению с результатами, полученными с использованием базовых методов. Этот результат свидетельствует о значительном прогрессе в области синтеза сложных человеко-сценических взаимодействий и открывает широкие возможности для применения в робототехнике, виртуальной реальности и анимации, где реалистичность и правдоподобность взаимодействия играют ключевую роль.

В этой работе наблюдается закономерная борьба между теорией и практикой. FunHSI, стремясь к генерации реалистичных взаимодействий человека и окружения, неизбежно сталкивается с суровой реальностью физического мира. Попытки моделировать функциональные возможности объектов и устанавливать корректные контакты, даже в новых условиях, напоминают попытки удержать песок в руке — чем сильнее сжимаешь, тем быстрее он утекает. Как однажды заметила Фэй-Фэй Ли: «Искусственный интеллект должен служить людям, а не наоборот». В данном случае, стремление к правдоподобной симуляции — это не просто технологический вызов, а попытка создать инструменты, которые действительно полезны и понятны человеку, даже если эта «полезность» ограничена границами виртуального пространства и неизбежными погрешностями моделирования контактов.
Что дальше?
Представленный подход, безусловно, добавляет ещё один слой абстракции между желанием увидеть взаимодействие человека и сцены и его фактической реализацией. И это, как известно, неизбежно. Пока модель демонстрирует способность генерировать правдоподобные взаимодействия, вопрос о надежности «функциональных аффордансов» остаётся открытым. В конечном счёте, любой CI — это лишь храм, в котором мы молимся, чтобы физика не вышла из-под контроля, а контактные графы не превратились в хаос.
Очевидно, что истинное испытание для подобных систем — не демонстрация работы на тщательно отобранных примерах, а устойчивость к реальным, непредсказуемым окружениям. Ожидается, что продукшен найдет способы сломать даже самую элегантную теорию, и новые ограничения, связанные с обработкой сложных сцен и динамических объектов, неизбежно возникнут. Ведь документация — это миф, созданный менеджерами, а реальный мир всегда сложнее любой модели.
В перспективе, вероятно, потребуется смещение фокуса с генерации самих взаимодействий на верификацию их физической корректности и безопасности. Не исключено, что будущие исследования будут направлены на создание систем, способных не только генерировать, но и оценивать правдоподобность и функциональность создаваемых взаимодействий, учитывая, что каждая «революционная» технология завтра станет техдолгом.
Оригинал статьи: https://arxiv.org/pdf/2601.20835.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Как сбросить приложение безопасности Windows, чтобы устранить проблемы в Windows 11 и 10
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Шоппинг в Гонконге. Где купить iPhone и iPad.
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Нефть вниз, инфляция под контролем: что ждет российский рынок в апреле? (14.03.2026 04:32)
- Простые советы, чтобы немедленно улучшить ваши фотографии.
- Motorola Moto G67 Power ОБЗОР: яркий экран, плавный интерфейс, удобный сенсор отпечатков
- Nothing Phone (4a) Pro ОБЗОР: большой аккумулятор, скоростная зарядка, замедленная съёмка видео
- Лучшие смартфоны. Что купить в марте 2026.
- Лучшие ноутбуки с глянцевым экраном. Что купить в марте 2026.
2026-01-29 17:42