Автор: Денис Аветисян
Исследователи разработали инновационный метод тактильного восприятия, основанный на анализе звука, возникающего при колебании натянутых струн.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"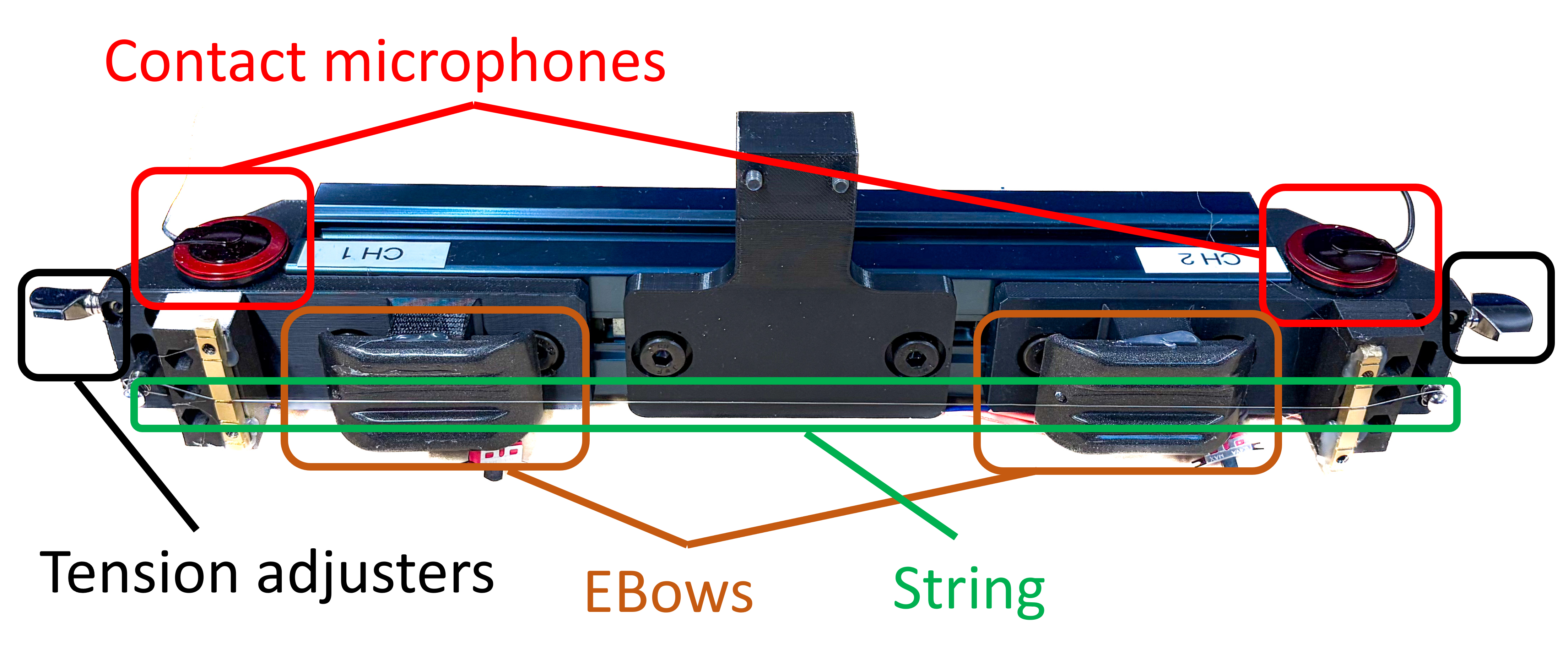
В статье представлен подход к тактильному зондированию, использующий анализ частоты колебаний струн для точной локализации контакта, оценки силы и обнаружения проскальзывания.
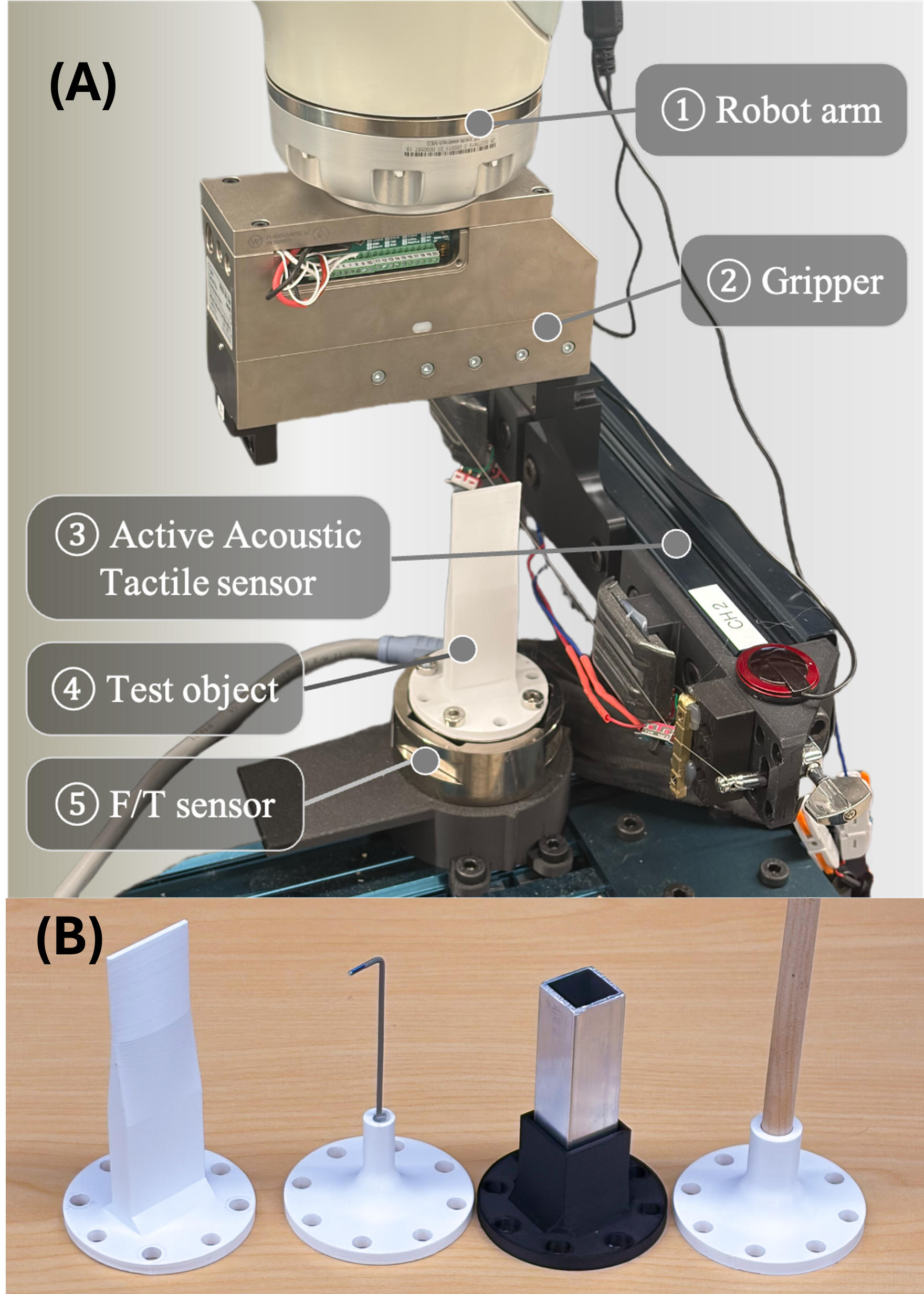
Масштабирование распределенных тактильных сенсоров остается сложной задачей из-за проблем с проводкой, стоимостью и надежностью. В данной работе, озаглавленной ‘Sound of Touch: Active Acoustic Tactile Sensing via String Vibrations’, представлен новый подход к активному акустическому тактильному сенсорингу, использующий вибрации натянутых струн в качестве чувствительных элементов. Система позволяет оценивать местоположение контакта, приложенную силу и обнаруживать проскальзывание, анализируя изменения спектра звука, возникающие при взаимодействии со струной. Может ли данный волновой метод сенсоринга, основанный на частотном анализе, стать основой для создания более эффективных и масштабируемых тактильных систем для робототехники и других приложений?
Преодолевая ограничения традиционного тактильного зондирования
Современные тактильные сенсоры зачастую сталкиваются с проблемой компромисса между сложностью и чувствительностью. Многие существующие системы требуют дорогостоящего оборудования и сложной калибровки, что ограничивает их практическое применение, особенно в массовом производстве роботов и протезов. Другие, напротив, используют упрощенные конструкции, но при этом теряют способность улавливать тонкие нюансы контакта — например, различить легкое касание от более сильного нажатия или определить текстуру поверхности. Эта неспособность к детальному восприятию ограничивает возможности роботов манипулировать хрупкими объектами или выполнять задачи, требующие высокой точности и деликатности. В результате, возникает потребность в создании тактильных сенсоров, которые бы обеспечивали высокую чувствительность и детализацию, оставаясь при этом простыми в изготовлении и доступными по цене.
Существующие тактильные сенсоры часто сталкиваются с трудностями при одновременном определении ключевых параметров контакта, таких как местоположение, величина нормальной силы и наличие проскальзывания. Это ограничение существенно препятствует развитию ловкости роботов, поскольку для точного манипулирования объектами требуется комплексное понимание взаимодействия с поверхностью. Неспособность сенсоров различать эти факторы приводит к неэффективным захватам, повреждению объектов и ограничению возможностей роботов в выполнении сложных задач, требующих деликатности и точности. Разработка сенсоров, способных надежно и одновременно регистрировать все три параметра, является критически важной для создания действительно универсальных и эффективных роботизированных систем.
В настоящее время активно разрабатываются принципиально новые подходы к тактильному сенсорике, направленные на преодоление ограничений существующих систем. Необходимость заключается в создании устройств, способных обеспечивать высокую точность восприятия (fidelity), простоту конструкции и алгоритмов обработки данных, а также возможность определения широкого спектра параметров контакта. Речь идет не только о регистрации места и силы прикосновения, но и об определении характеристик скольжения, текстуры поверхности и даже материала объекта. Такой комплексный подход позволит роботам не просто «чувствовать», но и «понимать» окружающую среду, открывая новые горизонты в области манипуляций, сборочного производства и взаимодействия с людьми. В перспективе, подобные сенсоры могут стать ключевым элементом в создании интеллектуальных протезов и роботизированных систем помощи.
Активное акустическое тактильное зондирование: новый подход к восприятию
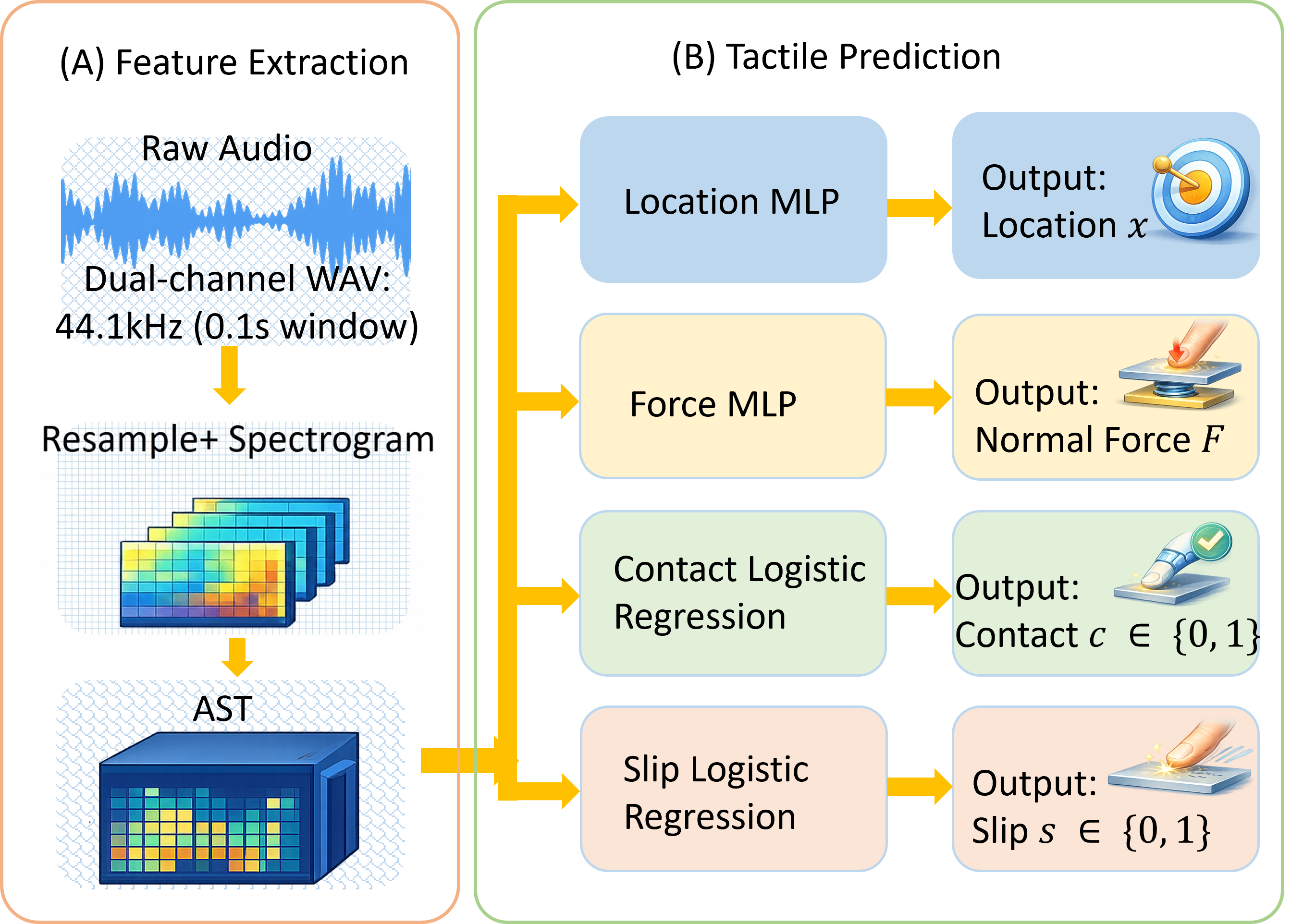
Активное акустическое тактильное зондирование базируется на принципах волнового тактильного зондирования, однако использует непрерывное возбуждение для повышения точности сигнала. В традиционных системах тактильного зондирования используются импульсные возбуждения, что ограничивает разрешение и чувствительность. Непрерывное возбуждение, напротив, позволяет получить более стабильный и информативный акустический отклик, что повышает надежность определения тактильных характеристик объекта. Применение непрерывного сигнала позволяет более эффективно фильтровать шумы и улучшить отношение сигнал/шум, что критически важно для распознавания тонких текстур и незначительных деформаций поверхности.
В основе системы активного акустического тактильного зондирования лежит использование электромагнитного привода (EBow) для создания вибраций в исследуемой струне. EBow, представляющий собой устройство, генерирующее магнитное поле, возбуждает колебания струны без физического контакта. Изменение характеристик этих колебаний, вызванное прикосновением объекта к струне, служит первичным сигналом для определения контакта и последующего анализа тактильных свойств. Использование электромагнитного возбуждения позволяет избежать механического износа и обеспечивает стабильную и воспроизводимую работу системы.
Анализ акустического отклика позволяет определять ключевые тактильные характеристики объекта без непосредственного измерения приложенной силы. Система регистрирует изменения в звуковых волнах, возникающих при взаимодействии с поверхностью, и на основе этих изменений вычисляет такие параметры, как текстура, форма и жесткость. Вместо измерения силы, необходимой для деформации объекта, система интерпретирует характеристики отраженного звука, что позволяет получить информацию о тактильных свойствах без физического контакта датчика с поверхностью объекта и избежать ошибок, связанных с калибровкой и дрейфом датчиков силы. Этот подход особенно полезен в задачах, где прямое измерение силы затруднено или нежелательно.

Механизм восприятия: вибрации и тактильные выводы
В основе системы лежит принцип вибрации натянутой струны, которая функционирует как динамическая среда для тактильного восприятия. Натяжение струны обеспечивает передачу механических колебаний, возникающих при контакте с объектом. Именно анализ этих колебаний позволяет системе получать информацию о характеристиках касания. Изменение частоты и паттернов вибрации напрямую связано с местоположением контакта и началом скольжения, что делает струну ключевым элементом в процессе тактильного восприятия и последующей обработки данных.
Изменения в резонансной частоте и паттернах вибрации струны несут информацию о контакте, включая его местоположение и начало проскальзывания. Локализация контакта определяется по изменению частоты, вызванному деформацией струны в точке касания, а начало проскальзывания — по изменению характера вибраций, отражающему потерю сцепления между поверхностями. Анализ этих изменений позволяет с высокой точностью определить координаты точки контакта и зафиксировать момент начала движения, что критически важно для реализации тактильного восприятия и управления манипулятором.
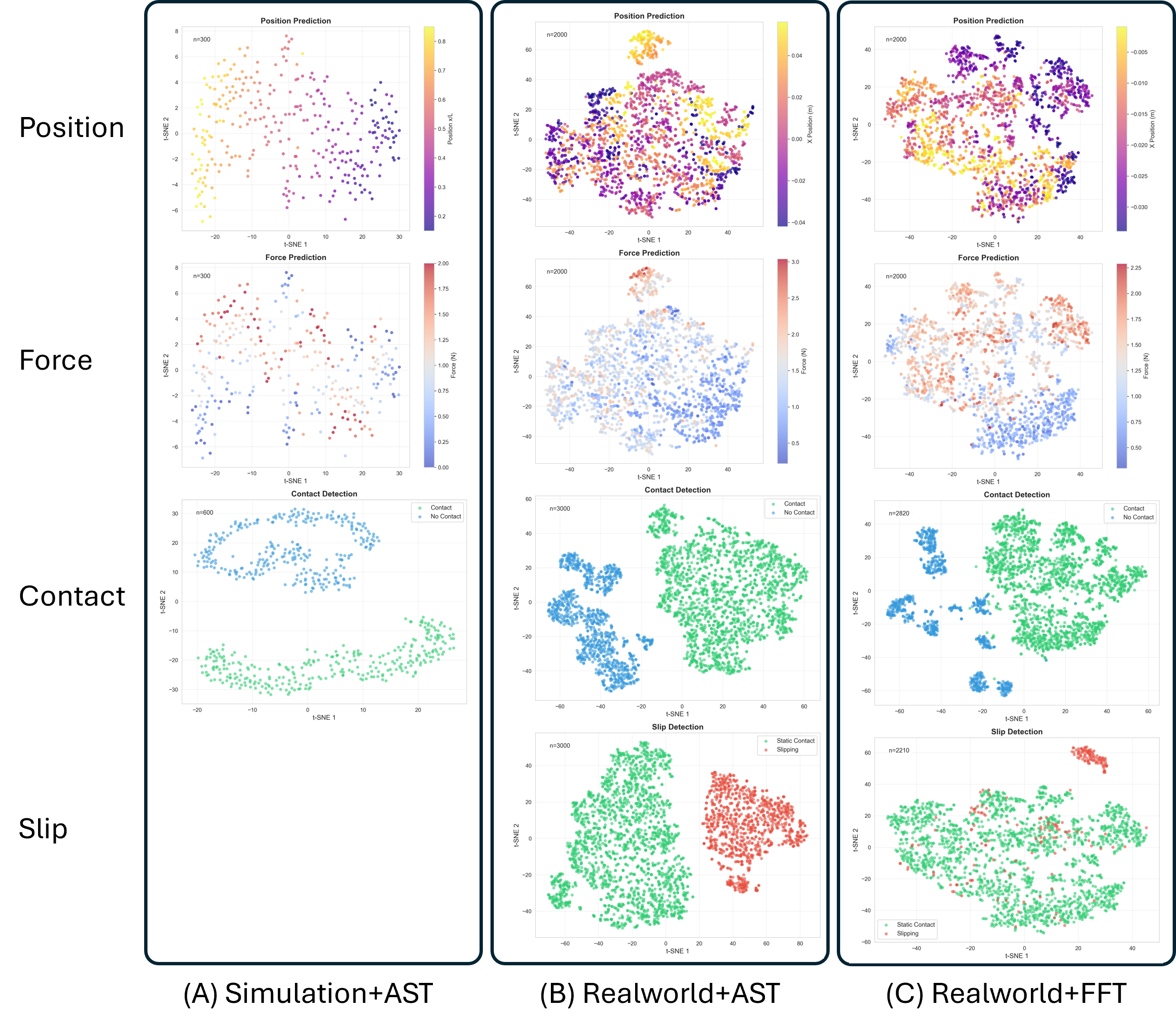
Система позволяет осуществлять одновременное обучение для решения нескольких задач, извлекая информацию о различных тактильных характеристиках из единого сигнала вибрации струны. Достигнута миллиметровая точность локализации контакта в диапазоне ошибки 2-9 мм, а также оценка силы контакта с ошибкой 0.11-0.17 Н. Практическая реализация демонстрирует, что 50-88% случаев локализации контакта происходит в пределах 5 мм, а 67-84% оценок силы контакта находятся в пределах 0.2 Н.
Результаты тестирования системы показали высокую точность определения местоположения контакта и оценки приложенной силы. В 50-88% случаев местоположение контакта определялось с точностью до 5 мм, а величина приложенной силы — в пределах 0.2Н. Данные показатели демонстрируют эффективность предложенного подхода к тактильному восприятию и позволяют использовать систему в задачах, требующих прецизионного определения параметров взаимодействия с объектами.
Ограничения и перспективы развития тактильного зондирования
В текущей реализации тактильного сенсора используется одномерное измерение, что существенно ограничивает возможность получения полной и детализированной информации о прикосновении. Вместо восприятия формы, текстуры и силы давления в полной мере, система фиксирует лишь изменение сигнала вдоль одной оси. Это означает, что, например, различение объектов сложной формы или определение тонких изменений в текстуре поверхности становится затруднительным. В результате, хотя система и способна регистрировать факт прикосновения, её возможности по детальному анализу тактильных ощущений остаются ограниченными, что влияет на точность и эффективность работы в задачах, требующих высокого уровня тактильной чувствительности.
Предстоящие исследования направлены на значительное расширение сенсорной матрицы, что позволит перейти от одномерного к двух- или трехмерному тактильному восприятию. Увеличение числа датчиков и их пространственное распределение создадут более детальную картину взаимодействия с объектами, позволяя системе не только определять наличие контакта, но и его форму, текстуру и приложенное давление. Такой подход имитирует сложность человеческого осязания и открывает возможности для создания роботов, способных выполнять тонкие манипуляции, а также более совершенных протезов и интуитивно понятных интерфейсов «человек-машина». Разработка трехмерного тактильного восприятия станет ключевым шагом к созданию систем, способных полноценно взаимодействовать с окружающим миром.
Предложенная технология демонстрирует значительный потенциал для широкого спектра применений, особенно в области роботизированных систем. Возможность создания искусственной тактильной чувствительности открывает новые горизонты для манипуляций роботами, позволяя им более точно и безопасно взаимодействовать с объектами различной формы и текстуры. Не менее перспективным является использование данной разработки в протезировании, где она может обеспечить пациентам с ампутированными конечностями более естественное ощущение прикосновения и улучшить контроль над протезом. Кроме того, технология может быть интегрирована в интерфейсы «человек-машина», создавая более интуитивные и эффективные способы взаимодействия, например, в системах виртуальной реальности или при управлении сложным оборудованием. Дальнейшие исследования и усовершенствования позволят полностью раскрыть потенциал этой разработки и внести значительный вклад в развитие робототехники и биомедицинских технологий.
Представленное исследование демонстрирует изящный подход к тактильному сенсору, основанный на анализе колебаний натянутых струн. Подобно тому, как математическая дисциплина позволяет выявить закономерности в хаосе, здесь акустический анализ преобразует физическое взаимодействие в четкие данные о местоположении контакта и проскальзывании. Как однажды заметил Эдсгер Дейкстра: «Программное обеспечение должно быть таким, чтобы даже его автор не мог его сломать». Этот принцип находит отражение в надежности предложенной системы, где точность определения параметров контакта обеспечивается фундаментальными физическими принципами и математической строгостью обработки сигнала. В основе лежит идея о том, что корректность алгоритма — это не просто его работоспособность, а его доказуемость, что и демонстрирует данный подход к тактильному сенсору.
Что Дальше?
Представленная работа, безусловно, демонстрирует элегантность подхода, основанного на анализе колебаний струн для тактильного восприятия. Однако, следует признать, что переход от лабораторного прототипа к надежной и масштабируемой системе сопряжен с рядом нетривиальных задач. Точность определения координат контакта и оценки силы, продемонстрированная в контролируемых условиях, требует дальнейшей проверки в условиях реального мира, с учетом шумов, нелинейностей и вариативности материалов.
Ключевым вопросом остается устойчивость алгоритмов к сложным взаимодействиям — не просто скольжению, но и одновременному воздействию нескольких сил, различным текстурам и деформациям объекта. Простое решение, позволяющее отличить истинное скольжение от незначительных колебаний, вызванных шероховатостью поверхности, представляется задачей, требующей не просто увеличения вычислительной мощности, но и глубокого понимания физики контакта. Необходимо исследовать возможность применения методов машинного обучения, но с обязательным сохранением математической строгости и доказуемости полученных результатов.
В конечном счете, истинный прогресс в области тактильного восприятия заключается не в увеличении количества датчиков или сложности алгоритмов, а в создании систем, способных к абстракции и обобщению. Систем, которые, подобно человеку, способны не просто “чувствовать”, но и “понимать” природу взаимодействия с окружающим миром. И это, пожалуй, задача, требующая не только инженерного гения, но и философского осмысления самой природы восприятия.
Оригинал статьи: https://arxiv.org/pdf/2602.16846.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Неважно, на что вы фотографируете!
- Honor X80i ОБЗОР: плавный интерфейс, большой аккумулятор, объёмный накопитель
- Лучшие смартфоны. Что купить в апреле 2026.
- Что такое ISO в фотоаппарате
- Infinix Note 40 Pro+ выставлен на обзор
- Рекомендации нового поколения: объединяя визуальное и текстовое
2026-02-20 16:38