Автор: Денис Аветисян
Новый подход к трехмерному прогнозированию занятости пространства использует суперквадрики и когерентное временное моделирование для повышения надежности систем автономного вождения.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"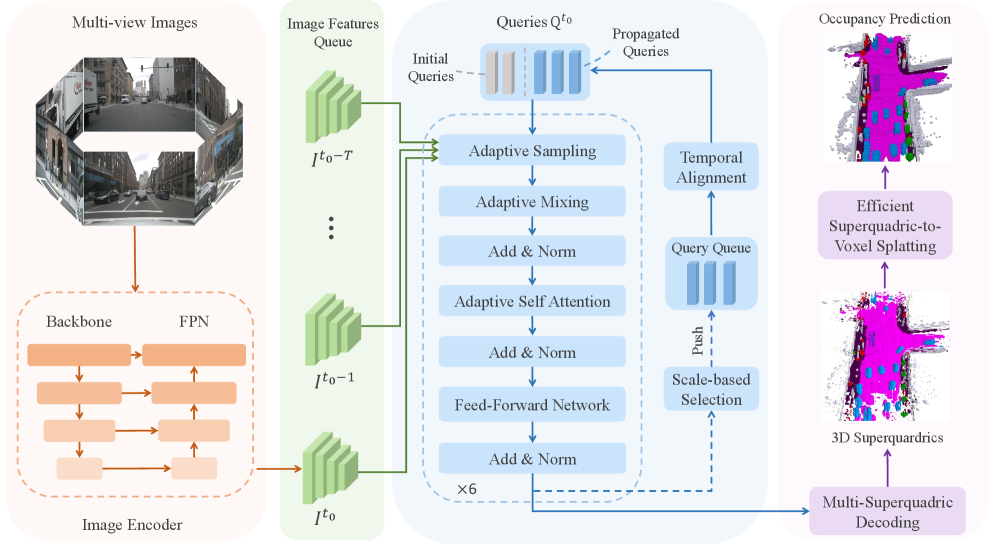
Представлен фреймворк SuperOcc, сочетающий эффективное представление сцены на основе суперквадриков, согласованное отслеживание во времени и оптимизацию для GPU с использованием CUDA.
Построение плотных представлений сцены для предсказания занятости пространства часто оказывается избыточным и неэффективным в реальных условиях автономного вождения. В данной работе, ‘SuperOcc: Toward Cohesive Temporal Modeling for Superquadric-based Occupancy Prediction’, предложен новый подход, использующий суперквадрики для создания разреженных представлений и улучшенное моделирование временных зависимостей. Ключевым результатом является разработка SuperOcc — фреймворка, объединяющего согласованное временное моделирование, многосуперквадрическую декодирующую стратегию и эффективное преобразование суперквадриков в воксели для достижения передовых результатов и повышения вычислительной эффективности. Какие перспективы открывает использование разреженных представлений и оптимизированных алгоритмов для создания более надежных и эффективных систем автономного вождения?
Шёпот Трехмерного Пространства: Вызовы и Возможности
Точное и эффективное понимание трехмерной сцены играет ключевую роль в развитии таких передовых технологий, как автономное вождение и робототехника. Способность системы корректно интерпретировать окружающее пространство — от распознавания объектов и их границ до прогнозирования их движения — напрямую влияет на безопасность и надежность работы беспилотных транспортных средств и роботов-помощников. Без надежного восприятия трехмерной среды, сложные задачи, такие как навигация в плотном городском трафике или манипулирование объектами в реальном времени, становятся практически невыполнимыми. Таким образом, совершенствование алгоритмов и методов трехмерного понимания сцены является важнейшей задачей для дальнейшего прогресса в этих областях.
Традиционные методы представления и прогнозирования трехмерных сцен сталкиваются с существенными трудностями в обеспечении как точности, так и вычислительной эффективности, особенно в сложных окружениях. Существующие подходы часто оперируют с огромными объемами данных, требуя значительных ресурсов для обработки и хранения. Это связано с тем, что моделирование сложных геометрических форм и текстур, а также учет различных факторов освещения и окклюзии, требует больших вычислительных мощностей. Кроме того, часто используемые дискретные представления, такие как воксели или point clouds, могут приводить к потере информации и снижению точности, особенно при работе с детальными и сложными сценами. В результате, существующие методы оказываются недостаточно эффективными для применения в реальном времени в таких областях, как автономное вождение и робототехника, где требуется быстрая и точная обработка трехмерных данных.
Существующие методы анализа трехмерных сцен зачастую испытывают трудности при моделировании временной информации, что приводит к непоследовательности и неточностям в прогнозах. В динамичных окружениях, где объекты перемещаются и изменяются со временем, статичные или неадекватно учитывающие временной фактор модели не способны обеспечить надежное восприятие реальности. Например, при отслеживании движущихся объектов, недостаточный учет предыдущих положений и скоростей приводит к ошибкам в предсказании их будущих траекторий. Это особенно критично для приложений, требующих высокой точности и надежности, таких как автономное вождение и робототехника, где даже незначительные неточности могут привести к серьезным последствиям. Разработка методов, способных эффективно интегрировать и использовать временную информацию, является ключевой задачей для улучшения качества и надежности систем трехмерного понимания сцен.
SuperOcc: Геометрия, Подчинённая Времени
SuperOcc представляет новый подход к предсказанию 3D-занятости, используя суперквадрики в качестве компактного и выразительного геометрического примитива. В отличие от традиционных методов, оперирующих вокселями или точками, SuperOcc кодирует сцены с помощью параметрических суперквадриков, что позволяет существенно уменьшить объем необходимых данных для представления геометрии. Суперквадрики, определяемые небольшим набором параметров, описывающих форму и размер, обеспечивают эффективное представление сложных объектов и сцен с высокой степенью детализации. Такой подход позволяет добиться более компактного представления 3D-пространства, что критически важно для обработки и хранения больших сцен, а также для повышения скорости вычислений при предсказании занятости.
В основе SuperOcc лежит комбинированный подход к временному моделированию, объединяющий анализ сцены с точки зрения наблюдателя (view-centric) и анализ отдельных объектов (object-centric). View-centric подход позволяет эффективно отслеживать кратковременные изменения и движения в сцене, используя информацию из последовательности изображений, полученных с одной или нескольких камер. Object-centric подход, в свою очередь, позволяет моделировать долгосрочные зависимости, отслеживая состояние и траекторию движения отдельных объектов в сцене независимо от позиции наблюдателя. Комбинирование этих двух подходов обеспечивает более точное и устойчивое предсказание 3D-заполненности пространства в динамических сценах, позволяя SuperOcc эффективно обрабатывать сложные движения и изменения в геометрии объектов.
Декодирование на основе множественных суперквадриков повышает геометрическую выразительность представления, позволяя моделировать сложные формы и структуры. Вместо использования единого суперквадрика для представления объекта, SuperOcc использует комбинацию нескольких суперквадриков, каждый из которых описывает определенную часть геометрии. Это позволяет более точно аппроксимировать сложные поверхности и детали, которые были бы невозможны при использовании одного примитива. Комбинация суперквадриков осуществляется посредством параметрического управления их масштабом, ориентацией и положением в пространстве, что обеспечивает гибкость и точность моделирования. Такой подход особенно эффективен для представления объектов со сложной топологией и нетривиальной формой.
![Алгоритм SuperOcc успешно реконструирует сцены из набора данных SurroundOcc[43], предсказывая суперквадрики и соответствующую им заполненность пространства с учётом семантической категоризации объектов.](https://arxiv.org/html/2601.15644v1/x4.png)
Эффективная Реализация и Валидация
Разработан эффективный метод преобразования суперквадричных представлений в воксельную семантическую карту заполнения (splatting). Данный метод ускоряет процесс конвертации за счет оптимизированного воксельного заполнения, что позволяет быстро создавать 3D-представления окружения на основе суперквадричных примитивов. Оптимизация включает в себя эффективное распределение вокселей и алгоритмы интерполяции, направленные на минимизацию вычислительных затрат при сохранении точности представления. Это позволяет использовать систему в реальном времени для задач, требующих быстрого построения и обновления 3D-карт, например, в системах робототехники и дополненной реальности.
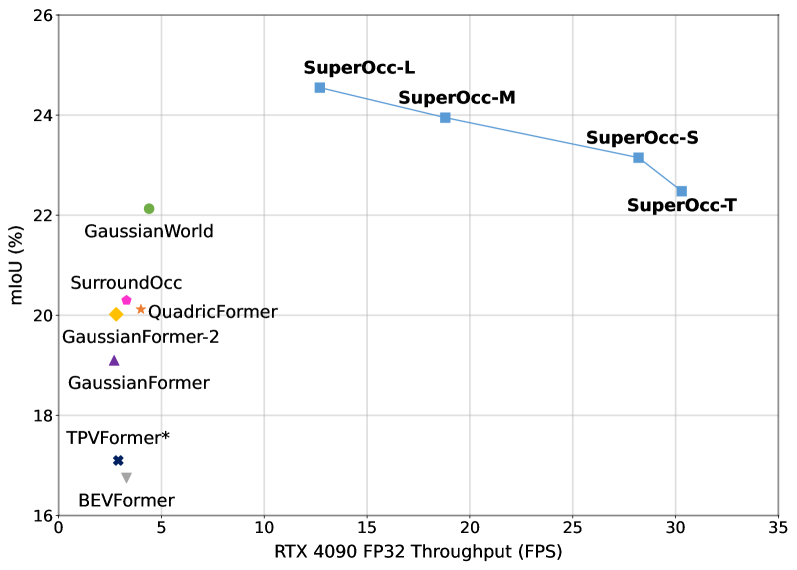
Система была протестирована на стандартных наборах данных Occ3D и SurroundOcc, что позволило продемонстрировать значительное улучшение точности и эффективности по сравнению с существующими аналогами. На наборе данных Occ3D достигнуты максимальные значения метрик: mean Intersection over Union (mIoU) составил 29.1%, а Ray Intersection over Union (RayIoU) — 34.9%. Эти результаты подтверждают превосходство предложенного подхода в задачах построения 3D семантических карт заполненности.
Для количественной оценки эффективности разработанного фреймворка использовались метрики mean Intersection over Union (mIoU) и Ray Intersection over Union (RayIoU). На датасете Occ3D была достигнута максимальная точность mIoU в 29.1% и RayIoU в 34.9%. Кроме того, производительность системы была измерена как 30.3 кадра в секунду (FPS) при проведении инференса на том же датасете, что демонстрирует высокую скорость работы и пригодность для приложений реального времени.
Масштабируемость и Взгляд в Будущее
Реализация SuperOcc активно использует вычислительную платформу CUDA для значительного ускорения необходимых вычислений, что позволяет достичь производительности в реальном времени. Этот подход критически важен для приложений, требующих быстрого анализа и понимания трехмерных сцен, таких как автономная навигация или интерактивные визуализации. Использование CUDA позволяет параллельно обрабатывать большие объемы данных, существенно снижая задержки и обеспечивая возможность оперативной реакции системы на изменяющиеся условия окружающей среды. Благодаря этому, SuperOcc не только эффективно решает задачу представления сложных сцен, но и открывает новые возможности для приложений, требующих мгновенного анализа и понимания визуальной информации.
Разработка SuperOcc успешно решает ключевые задачи в области понимания трехмерных сцен благодаря эффективному сочетанию геометрических примитивов и передовых методов временного моделирования. Такой подход позволяет существенно оптимизировать процесс обучения и снизить задержку рендеринга. В ходе исследований было зафиксировано снижение времени обучения на 76% и уменьшение задержки сплэттинга на 79% по сравнению с базовыми методами, что открывает возможности для применения системы в задачах, требующих обработки данных в реальном времени и высокой производительности. Это достигается за счет более компактного представления сцены и эффективного использования временной информации для предсказания изменений, что значительно ускоряет процесс визуализации и анализа.
Дальнейшие исследования направлены на расширение возможностей разработанной системы для работы со значительно более сложными окружениями, включающими динамические объекты и разнообразные текстуры. Особое внимание будет уделено интеграции дополнительных сенсорных данных, таких как лидар и радар, для повышения точности и надежности реконструкции трехмерных сцен. Предполагается, что объединение информации из различных источников позволит системе эффективно справляться с условиями низкой освещенности и частичной видимости, а также значительно улучшить понимание окружающей среды в реальном времени, открывая новые перспективы для применения в робототехнике, автономном транспорте и виртуальной реальности.
Исследование, представленное в данной работе, напоминает алхимический поиск эссенции движения. Авторы стремятся не просто предсказать заполненность пространства, но и уловить саму суть временной когерентности, используя суперквадрики как своего рода «первичную материю». Как точно подметил Дэвид Марр: «Модели — это заклинания, которые работают до первого продакшена». И действительно, даже самая изящная модель предсказания заполненности, как и любое заклинание, нуждается в постоянной адаптации к суровым условиям реального мира, особенно в контексте автономного вождения, где цена ошибки непомерно высока. Успех SuperOcc, основанный на эффективной CUDA оптимизации, лишь подтверждает, что даже самые сложные алгоритмы нуждаются в практической реализации, чтобы перестать быть лишь теоретическими построениями.
Куда же дальше?
Предложенный подход, оперирующий суперквадриками и когерентным временным моделированием, безусловно, заставляет задуматься. Однако, стоит помнить: всё, что можно аккуратно обернуть в математическую формулу, скорее всего, лишь бледная тень реальности. Высокая точность предсказания — это хорошо, но не стоит забывать, что окружающий мир любит подбрасывать сюрпризы, которые никакие суперквадрики не предвидят. Идеальная корреляция, если таковая вдруг обнаружится, почти наверняка указывает на ошибку в данных или, что более вероятно, на недостаточную глубину поиска.
Будущие исследования, вероятно, столкнутся с необходимостью преодолеть хрупкость этих моделей перед лицом непредсказуемых событий. Интеграция с системами, способными к обучению на ошибках и адаптации в реальном времени, представляется неизбежной. Попытки ввести в модель элементы случайности, имитирующие хаотичность реального мира, могут оказаться плодотворными, хотя и парадоксальными. Ведь, в конце концов, предсказывать хаос — это всё равно что пытаться поймать ветер сетью.
Оптимизация на CUDA, безусловно, важна, но стоит помнить, что скорость вычислений — это лишь способ отвлечься от фундаментальной неопределенности. Если гипотеза подтвердилась слишком легко, возможно, стоит искать более сложные, более правдоподобные объяснения. Иначе рискуем построить красивую, но бесполезную иллюзию.
Оригинал статьи: https://arxiv.org/pdf/2601.15644.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Деформация сеток: новый подход на основе нейронных операторов
- Новые смартфоны. Что купить в марте 2026.
- Российский рынок акций: нефть, ставки и дивиденды: что ждет инвесторов в ближайшее время? (05.03.2026 16:32)
- Нефть и бриллианты лидируют: обзор воскресных торгов на «СПБ Бирже» (08.03.2026 16:32)
- Лучшие смартфоны. Что купить в марте 2026.
- vivo iQOO Z10x ОБЗОР: яркий экран, удобный сенсор отпечатков, объёмный накопитель
- Что такое Bazzite и лучше ли она, чем Windows для PC-гейминга? Я установил этот набирающий популярность дистрибутив Linux, чтобы проверить это самостоятельно.
- Infinix Note 60 Ultra ОБЗОР: скоростная зарядка, объёмный накопитель, отличная камера
- Ближний Восток и Рубль: Как Геополитика Перекраивает Российский Рынок (02.03.2026 20:32)
- Руководство по Stellaris — Полное прохождение на 100%
2026-01-24 01:20