Автор: Денис Аветисян
Новое исследование демонстрирует возможности декодирования намерений человека по сигналам мозга для управления роботизированной техникой.
Офлайн-бенчмаркинг алгоритмов глубокого обучения для декодирования ЭЭГ и управления роботизированным шасси.
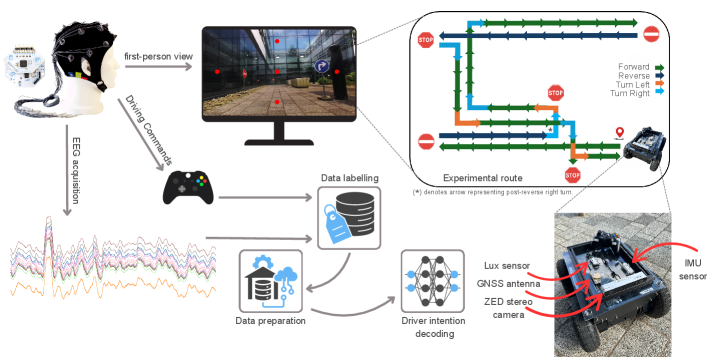
Несмотря на значительный прогресс в области интерфейсов мозг-компьютер, точное декодирование намерений пользователя в реальном времени для управления мобильными роботами остается сложной задачей. В работе ‘EEG-Driven Intention Decoding: Offline Deep Learning Benchmarking on a Robotic Rover’ представлен комплексный подход к автономному управлению роботизированной платформой посредством анализа электроэнцефалограмм (ЭЭГ). Показано, что для прогнозирования команд управления роботизированным транспортом наиболее эффективны компактные сверточные нейронные сети (CNN), превосходящие по производительности рекуррентные сети и архитектуры Transformer. Какие перспективы открывает дальнейшая оптимизация и адаптация этих моделей для создания более интуитивных и надежных систем управления, основанных на анализе мозговой активности?
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"За гранью иллюзий: вызовы интерфейсов мозг-компьютер
Интерфейсы «мозг-компьютер» (ИМК) представляют собой перспективное направление, открывающее возможности управления внешними устройствами силой мысли, однако точное декодирование нейронных сигналов остается сложной задачей. Нейронная активность, регистрируемая с помощью электроэнцефалографии (ЭЭГ), характеризуется высокой сложностью и подвержена влиянию множества факторов, включая индивидуальные особенности мозга, уровень внимания и внешние помехи. Это создает значительные трудности при разработке алгоритмов, способных надежно интерпретировать намерения пользователя. Несмотря на значительный прогресс в области нейробиологии и машинного обучения, получение четкого и однозначного сигнала, соответствующего конкретному действию или команде, требует постоянного совершенствования методов обработки данных и разработки более устойчивых к шумам алгоритмов. Успешное преодоление этого препятствия позволит в полной мере реализовать потенциал ИМК в таких областях, как восстановление двигательных функций, управление протезами и создание новых форм взаимодействия человека и компьютера.
Традиционные алгоритмы, такие как метод опорных векторов (Support Vector Machines) и линейный дискриминантный анализ, зачастую оказываются неэффективными при обработке электроэнцефалограмм (ЭЭГ) из-за их внутренней сложности и высокой подверженности шумам. ЭЭГ представляет собой суммарную активность миллионов нейронов, и сигналы, отражающие намерения человека, часто тонут в фоновом электрическом шуме мозга и внешних помехах. Линейные модели, используемые в этих алгоритмах, могут быть неспособны уловить нелинейные взаимосвязи в данных ЭЭГ, что приводит к низкой точности декодирования и затрудняет надежное управление внешними устройствами. Необходимость в более сложных и адаптивных подходах, способных эффективно фильтровать шумы и извлекать значимую информацию из сложных ЭЭГ-сигналов, становится все более очевидной для реализации перспективных возможностей интерфейсов мозг-компьютер.
Для полной реализации потенциала интерфейсов «мозг-компьютер», особенно в таких областях, как управление роботизированными системами, крайне важна разработка устойчивых и адаптируемых алгоритмов. Существующие методы декодирования нейронных сигналов зачастую не способны справиться со сложностью и изменчивостью электроэнцефалограмм (ЭЭГ), что приводит к неточностям и ненадежности управления. Новые алгоритмы должны быть способны к самообучению и адаптации к индивидуальным особенностям мозга пользователя, а также к изменениям в его нейронной активности со временем. Такая адаптивность позволит создавать более интуитивные и эффективные системы управления, открывая путь к широкому спектру применений, от помощи людям с ограниченными возможностями до создания новых форм взаимодействия человека и машины.
Глубокое обучение: новая надежда в декодировании мозга
Глубокое обучение предоставляет мощную основу для обработки сигналов в интерфейсах мозг-компьютер (ИМК), позволяя извлекать сложные закономерности непосредственно из необработанных данных электроэнцефалограммы (ЭЭГ). В отличие от традиционных методов, требующих ручной разработки признаков, глубокие нейронные сети автоматически обучаются на данных ЭЭГ, выявляя нелинейные и высокоуровневые характеристики, которые могут быть связаны с различными когнитивными состояниями или намерениями пользователя. Это позволяет создавать более адаптивные и точные системы ИМК, способные эффективно декодировать мозговую активность без необходимости предварительной обработки или экспертных знаний в области нейрофизиологии. Автоматическое извлечение признаков и обучение на больших объемах данных значительно повышают производительность и надежность систем ИМК, расширяя возможности применения в различных областях, включая нейрореабилитацию, управление устройствами и коммуникацию.
Сверточные нейронные сети (CNN), такие как EEGNet, DeepConvNet и CCNN, продемонстрировали высокую эффективность в извлечении признаков из сигналов ЭЭГ. Эти сети применяют сверточные фильтры для автоматического обнаружения пространственных паттернов в данных ЭЭГ, что позволяет избежать ручного проектирования признаков. EEGNet, в частности, использует глубинные сверточные слои и импульсные свертки для повышения эффективности и снижения вычислительной нагрузки. DeepConvNet отличается многослойной архитектурой, позволяющей извлекать иерархические признаки. CCNN (Convolutional Common Spatial Patterns) сочетает в себе свертки с методом общих пространственных паттернов (CSP) для улучшения разделения различных состояний мозга. Все эти сети показали превосходные результаты в задачах классификации и декодирования сигналов ЭЭГ, превосходя традиционные методы обработки сигналов.
Рекуррентные нейронные сети (RNN), в частности, варианты LSTM (Long Short-Term Memory) и GRU (Gated Recurrent Unit), эффективно моделируют временную динамику, присущую мозговой активности. В отличие от традиционных нейронных сетей, RNN обладают «памятью», позволяющей им учитывать предыдущие состояния при обработке текущего сигнала. Это критически важно для анализа ЭЭГ, где последовательность электрических импульсов несет информацию о когнитивных процессах. Архитектуры LSTM и GRU решают проблему затухания градиента, свойственную классическим RNN, что позволяет им обрабатывать более длинные последовательности и захватывать долгосрочные зависимости в данных ЭЭГ. Они применяются для задач классификации ментальных состояний, распознавания намерений и управления интерфейсами «мозг-компьютер» (BCI), где временная структура сигнала имеет первостепенное значение.
В последнее время для анализа данных ЭЭГ активно исследуются архитектуры, основанные на трансформерах (ViT) и конформерах (EEG-Conformer). Традиционные подходы к обработке сигналов ЭЭГ часто сталкиваются с трудностями при захвате долгосрочных зависимостей во временных рядах. Архитектуры трансформеров, изначально разработанные для обработки естественного языка, благодаря механизмам внимания (attention), позволяют моделировать взаимодействия между удаленными участками сигнала ЭЭГ, выявляя паттерны, которые могут быть упущены другими методами. EEG-Conformer, в частности, комбинирует преимущества сверточных нейронных сетей (CNN) и трансформеров, обеспечивая эффективную обработку как локальных, так и глобальных особенностей сигнала, что повышает точность классификации и декодирования мозговой активности.
Оптимизация конвейера: данные и методы
Эффективные системы интерфейса «мозг-компьютер» (ИМК) требуют надежных методов предварительной обработки данных, среди которых важную роль играет метод Common Spatial Pattern (CSP) для снижения размерности. CSP позволяет выделить пространственные паттерны в данных электроэнцефалограммы (ЭЭГ), связанные с различными ментальными состояниями или командами. Алгоритм CSP проектирует данные ЭЭГ в новое пространство, максимизируя разницу между двумя или более классами, что облегчает последующую классификацию. Снижение размерности, достигаемое с помощью CSP, не только уменьшает вычислительную сложность, но и повышает устойчивость системы к шуму и артефактам, улучшая общую точность декодирования. Обычно, после применения CSP, используются методы машинного обучения для классификации пространственно-фильтрованных данных ЭЭГ.
Временная стратификация меток (Temporal Label Stratification) является критически важной процедурой для предотвращения утечки данных и обеспечения достоверной оценки производительности модели в системах интерфейса мозг-компьютер. Данный метод предполагает разделение данных на обучающую, валидационную и тестовую выборки таким образом, чтобы временные последовательности меток (например, моменты времени, когда пользователь выполняет определенное действие) не пересекались между этими выборками. Это предотвращает ситуацию, когда модель обучается на данных, содержащих информацию о будущих событиях, что приводит к искусственно завышенным показателям точности и нереалистичной оценке ее работоспособности в реальных условиях. При корректном применении временной стратификации, оценка производительности модели отражает ее способность к обобщению на новые, ранее не виденные временные последовательности, что является необходимым условием для надежной работы системы.
Выбор подходящей ЭЭГ-парадигмы, такой как воображение движений (Motor Imagery), P300 и стабильный зрительный вызванный потенциал (Steady-State Visual Evoked Potential, SSVEP), оказывает существенное влияние на точность декодирования. Параметры, определяющие эффективность каждой парадигмы, различаются: воображение движений требует от испытуемого ментальной визуализации физических действий, что может быть подвержено индивидуальным различиям в когнитивных способностях и требует более длительного обучения; P300 использует потенциалы, связанные с редкими событиями, и требует тщательной калибровки для минимизации ложноположительных результатов; SSVEP использует частотно-специфические ответы на визуальные стимулы, обеспечивая относительно высокую точность, но требуя четкой визуальной стимуляции. Точность декодирования, достижимая с использованием каждой парадигмы, напрямую зависит от силы и различимости ЭЭГ-сигналов, генерируемых в ответ на стимулы, а также от эффективности алгоритмов классификации, применяемых для анализа данных.
Используемые методы обработки и декодирования данных ЭЭГ применяются на различных уровнях управления в системах интерфейс мозг-компьютер. На уровне управления сервоприводами (Servo-Level System) происходит непосредственное преобразование сигналов ЭЭГ в команды для управления конкретными исполнительными механизмами, например, для движения роботизированной руки. На более высоком уровне, уровне управления задачами (Task-Level System), декодированные намерения пользователя интерпретируются как команды для выполнения сложных задач, таких как выбор объекта из нескольких вариантов или навигация по виртуальной среде. Разделение на эти уровни позволяет создавать гибкие системы, способные как к точному управлению, так и к выполнению сложных, многоступенчатых операций.
ИМК в действии: управление роботами и горизонты возможностей
Современные достижения в области интерфейсов мозг-компьютер открывают захватывающие перспективы для управления транспортными средствами и роботизированными роверами посредством нейронных сигналов. Вместо традиционных методов управления, таких как джойстики или рули, становится возможным непосредственное управление устройствами силой мысли. Это достигается за счет декодирования мозговой активности, связанной с намерением движения, и преобразования этих сигналов в команды для транспортного средства или робота. Такой подход не только упрощает процесс управления, но и позволяет создавать более интуитивные и отзывчивые системы, особенно полезные для людей с ограниченными возможностями или в ситуациях, требующих высокой точности и скорости реакции. Разработка подобных технологий предполагает создание высокочувствительных сенсоров и алгоритмов обработки сигналов, способных надежно распознавать намерения пользователя и преобразовывать их в управляющие команды, обеспечивая плавное и безопасное взаимодействие человека с машиной.
Использование игрового контроллера Xbox в качестве эталона для получения достоверных меток и оценки эффективности систем интерфейса «мозг-компьютер» представляет собой ценный подход. В ходе исследований, действия пользователя, зарегистрированные с помощью контроллера, служат «золотым стандартом», позволяющим сопоставлять и оценивать точность декодирования намерений из сигналов мозга. Такой метод обеспечивает объективную метрику для сравнения различных алгоритмов и моделей, используемых в системах BCI, и позволяет количественно оценить, насколько хорошо декодированные намерения соответствуют фактическим действиям пользователя. Это особенно важно для разработки надежных и интуитивно понятных систем управления, где точность и предсказуемость являются ключевыми факторами.
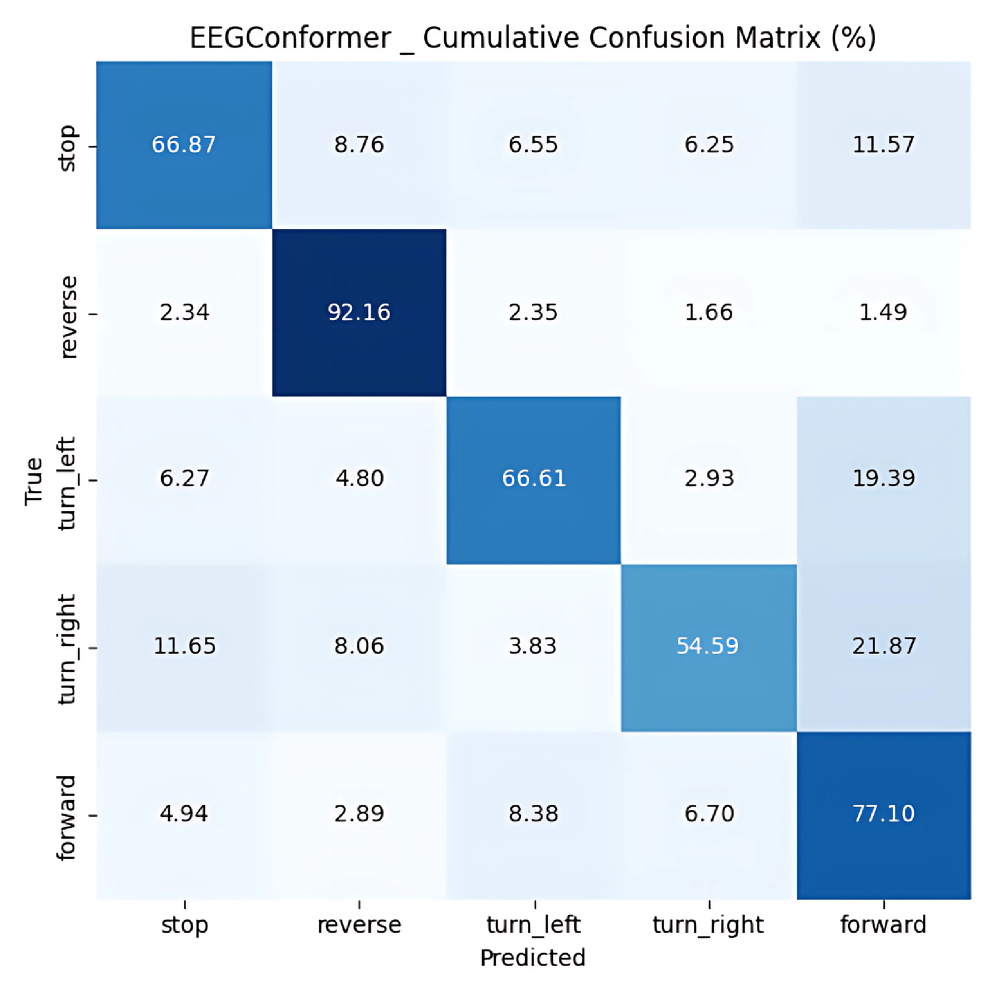
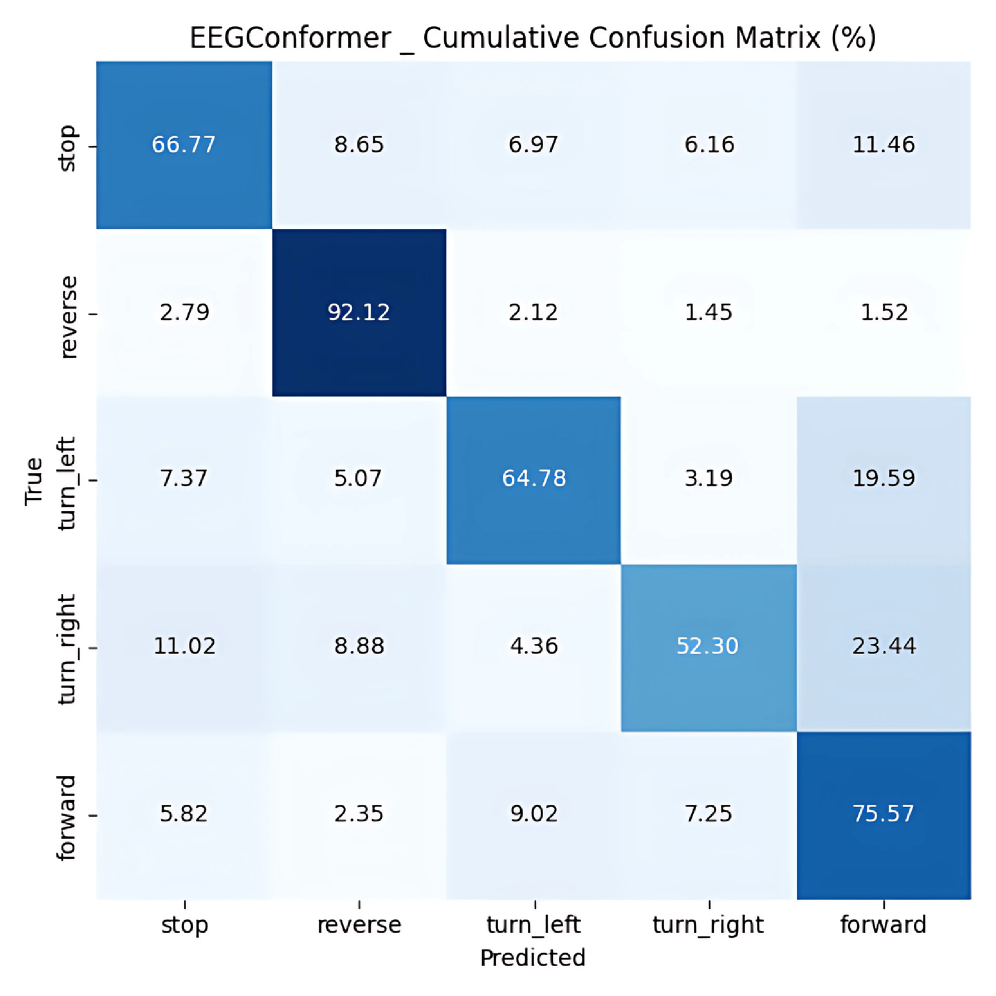
Оценка точности и надежности декодирования намерений является ключевой задачей в разработке интерфейсов мозг-компьютер. Для количественной оценки используются такие метрики, как F1-мера, позволяющая комплексно оценить точность и полноту распознавания. В рамках проведенного исследования была продемонстрирована устойчивая F1-мера в 66% при горизонте предсказания в 300 миллисекунд, достигнутая с использованием архитектуры ShallowConvNet. Данный результат свидетельствует о высокой способности системы предсказывать намерения пользователя с достаточной точностью и временным опережением, что открывает перспективы для создания более отзывчивых и интуитивно понятных систем управления.
Исследование продемонстрировало значительные различия в эффективности различных алгоритмов декодирования намерений. В частности, модель ShallowConvNet достигла впечатляющей точности в 83% при нулевом временном горизонте предсказания (Δ=0мс). В то же время, рекуррентная нейронная сеть GRU и модель EEGConformer показали результаты, соответствующие значениям F1 в 63% и 60% соответственно, также при Δ=0мс. Модель Vision Transformer (ViT), хотя и перспективна, продемонстрировала более низкий показатель F1, равный 52%, но уже при увеличенном временном горизонте в 300мс (Δ=300мс). Эти данные указывают на то, что ShallowConvNet является наиболее эффективным алгоритмом для мгновенного декодирования намерений, в то время как другие модели могут потребовать дополнительной оптимизации или быть более подходящими для предсказаний на более длительный период.
Перспективные интерфейсы мозг-компьютер, способные распознавать намерения, открывают беспрецедентные возможности для расширения человеческих способностей. Эти технологии обещают не только плавное и интуитивное управление сложными системами, такими как роботы и транспортные средства, но и значительное улучшение качества жизни людей с ограниченными возможностями. Разрабатываемые вспомогательные технологии, управляемые силой мысли, могут предоставить новые способы коммуникации, восстановления двигательных функций и независимого функционирования в повседневной жизни. По мере совершенствования алгоритмов декодирования намерений и повышения точности интерфейсов, можно ожидать появления более эффективных и адаптивных систем, которые органично интегрируются в жизнь человека, предоставляя невиданный ранее уровень контроля и свободы действий.
Исследование демонстрирует, как сложные алгоритмы, в данном случае, сверточные нейронные сети, пытаются угадать намерение человека по сигналам мозга. Это напоминает попытку предсказать поведение системы, которая всегда найдёт способ усложнить задачу. Как говорил Марвин Минский: «Наиболее перспективные направления исследований часто оказываются самыми сложными». И действительно, достижение точного декодирования намерений для управления роботизированным транспортом — задача нетривиальная, ведь любая абстракция, даже самая элегантная, рано или поздно столкнётся с непредсказуемостью реального мира и, как следствие, с необходимостью адаптации. Неизбежно, что-нибудь пойдёт не так, но главное — чтобы система красиво «упала», предоставив данные для дальнейшего совершенствования.
Что дальше?
Данная работа, безусловно, демонстрирует, что компактные свёрточные сети показывают себя лучше прочих в задаче декодирования намерений по ЭЭГ для управления роботизированной платформой. Однако, не стоит обольщаться. Всё, что обещает быть «самообучающимся» или «адаптивным», просто ещё не сломалось достаточно раз. В реальных условиях, шум, артефакты и, главное, непредсказуемость человеческого мозга быстро сведут на нет любые достижения в лабораторных условиях.
Вероятно, следующим этапом станет попытка создать не просто «декодер намерений», а систему, способную прогнозировать ошибки водителя. Ведь гораздо полезнее предвидеть, что человек собирается сделать неправильно, чем точно угадывать его текущее желание. И, конечно, не стоит забывать о документации — она всегда является формой коллективного самообмана. Каждая строчка кода — это потенциальная точка отказа, которую мы героически игнорируем.
Если же баг воспроизводится стабильно — это не признак успеха, а лишь подтверждение того, что у нас, наконец, стабильная система. И, да, стоит признать: реальное внедрение таких систем — это не про науку, а про бесконечный цикл миграций, рефакторинга и борьбы с техдолгом. И так будет всегда.
Оригинал статьи: https://arxiv.org/pdf/2602.20041.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Российский рынок в зоне турбулентности: рубль, ставки и новые риски (10.04.2026 01:32)
- Неважно, на что вы фотографируете!
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Honor X80i ОБЗОР: плавный интерфейс, большой аккумулятор, объёмный накопитель
- IdeaPad Slim 3 15IRH10R ОБЗОР
- Proton только что запустил альтернативу Google Workspace и Microsoft 365, ориентированную на конфиденциальность.
- Как использовать режимы съёмки P, S, A, M на фотоаппарате?
- Canon EOS 80D
- Realme Narzo 70 ОБЗОР: плавный интерфейс, большой аккумулятор, замедленная съёмка видео
2026-02-24 08:07