Автор: Денис Аветисян
Новая система MeshMimic позволяет гуманоидным роботам осваивать сложные задачи, имитируя движения человека и воссоздавая трехмерную модель окружающей среды по обычному видео.
Пока крипто-инвесторы ловят иксы и ликвидации, мы тут скучно изучаем отчетность и ждем дивиденды. Если тебе близка эта скука, добро пожаловать.
Купить акции "голубых фишек"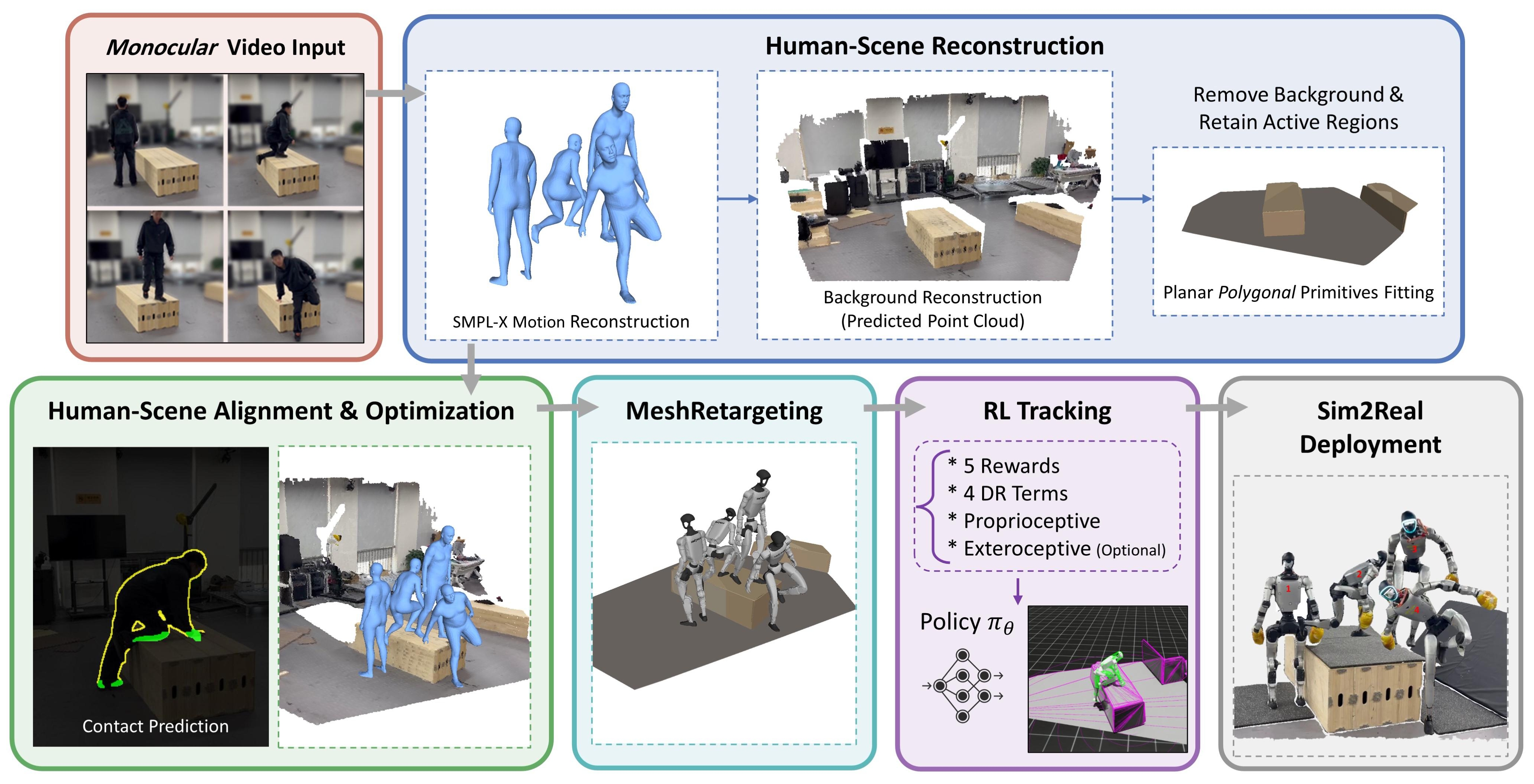
MeshMimic использует 3D Gaussian Splatting и обучение с подкреплением для создания реалистичного и устойчивого управления роботом в условиях сложной местности.
Несмотря на значительный прогресс в области управления гуманоидными роботами, воссоздание реалистичных и надежных взаимодействий с окружающей средой остается сложной задачей. В данной работе, ‘MeshMimic: Geometry-Aware Humanoid Motion Learning through 3D Scene Reconstruction’, представлен инновационный подход, позволяющий гуманоидным роботам обучаться сложным перемещениям на пересеченной местности непосредственно из монокулярного видео, путем одновременной реконструкции движения человека и трехмерной геометрии окружения. Разработанный фреймворк MeshMimic обеспечивает повышение реалистичности и устойчивости управления роботом за счет учета контекста окружающей среды. Возможно ли, используя подобные методы, создать полностью автономных гуманоидных роботов, способных к адаптации и обучению в неструктурированных условиях?
Преодолевая Ограничения: От Моделей Мира к Обучению в Действии
Традиционная робототехника, как правило, опирается на детальные и точные модели окружающей среды для выполнения задач. Однако, эта зависимость становится серьезным препятствием в реальных, динамично меняющихся условиях. Сложность заключается в том, что создание и поддержание таких моделей требует огромных вычислительных ресурсов и не позволяет роботу эффективно адаптироваться к непредвиденным изменениям или неточностям в окружении. Любое отклонение от предварительно заданного сценария, будь то перемещение объекта или изменение освещения, может привести к ошибкам и сбоям в работе. В отличие от гибкости и адаптивности, присущей живым организмам, роботы, полагающиеся на строгие модели, часто оказываются неспособными функционировать в непредсказуемых ситуациях, что ограничивает их применение в реальном мире.
Для создания по-настоящему интеллектуальных роботов необходим переход от ручного моделирования окружающей среды к обучению сложным движениям непосредственно на основе визуальной информации. Вместо того, чтобы предварительно программировать робота на взаимодействие с конкретным миром, современные исследования направлены на разработку систем, способных самостоятельно извлекать необходимые знания из зрительных данных. Такой подход позволяет роботу адаптироваться к новым, непредсказуемым ситуациям, не требуя постоянной перепрограммировки и значительно повышая его автономность. Вместо создания детальных карт и моделей, робот учится напрямую связывать визуальные стимулы с соответствующими действиями, подобно тому, как это делает человек, что открывает путь к более гибким и эффективным робототехническим системам, способным к естественному взаимодействию с окружающим миром.
Существующие методы обучения роботов-гуманоидов сталкиваются с серьезными трудностями при преобразовании двумерных визуальных данных в надежные трехмерные планы действий. Несмотря на значительные успехи в области компьютерного зрения, перенос информации, полученной с камер, в конкретные команды для моторов и суставов робота остается сложной задачей. Проблема заключается в том, что двумерное изображение содержит лишь часть информации об окружающем мире, необходимую для принятия решений о перемещении и взаимодействии. Роботу необходимо восстанавливать глубину, оценивать расстояния и предсказывать последствия своих действий, опираясь на неполные данные. Эта сложность приводит к тому, что роботы часто испытывают трудности при выполнении даже простых задач в реальных условиях, где окружение постоянно меняется и содержит множество неопределенностей.
Ограничение в способности роботов преобразовывать визуальную информацию в надежные трехмерные планы действий существенно замедляет прогресс в создании машин, способных беспрепятственно функционировать в сложных человеческих средах. Невозможность адекватно воспринимать и реагировать на динамично меняющийся мир вокруг, включая непредсказуемые движения людей и разнообразие объектов, приводит к неуклюжим и неэффективным взаимодействиям. Для полноценной интеграции роботов в повседневную жизнь, необходимы принципиально новые подходы, позволяющие им не просто «видеть», но и понимать контекст, предвидеть последствия своих действий и адаптироваться к неожиданностям, подобно тому, как это делает человек в естественной среде.
MeshMimic: Обучение Локомоции Человекоподобного Робота из Монокулярного Видео
MeshMimic представляет собой новую систему, обучающуюся управлению человекоподобной локомоцией непосредственно из монокулярного видеопотока. В отличие от традиционных подходов, требующих предварительной 3D реконструкции сцены и позы человека, MeshMimic обходит эту стадию, что значительно упрощает процесс обучения и позволяет использовать более широкий спектр доступных видеоданных. Система напрямую анализирует 2D видеопоток для извлечения информации о движении и формирования стратегий управления, что снижает вычислительные затраты и повышает эффективность обучения.
В основе MeshMimic лежит использование параметрической модели человеческого тела SMPL-X, что позволяет системе эффективно представлять и реконструировать позы человека непосредственно из монокулярного видео. SMPL-X описывает тело человека с помощью 150 параметров, включая форму и позу, что обеспечивает компактное и информативное представление. Благодаря этому, MeshMimic способен обучаться сложным движениям, используя большие объемы доступных видеоданных, не требуя ручной разметки или трудоемкой 3D-реконструкции каждого кадра. Использование SMPL-X упрощает процесс обучения и повышает обобщающую способность системы, позволяя ей адаптироваться к различным стилям движения и условиям съемки.
Для обучения модели MeshMimic используются методы 3D Gaussian Splatting и SAM3D, позволяющие воссоздавать реалистичные трехмерные окружения на основе входного видеопотока. 3D Gaussian Splatting представляет собой технику, основанную на представлении сцены в виде набора гауссовых сплэтов, что обеспечивает эффективное и детализированное воссоздание геометрии. SAM3D, в свою очередь, используется для оценки глубины и реконструкции трехмерной сцены из монокулярного видео, предоставляя информацию о расположении объектов и препятствий. Комбинация этих методов позволяет MeshMimic обучаться на данных, полученных из обычных видеозаписей, без необходимости в дорогостоящем оборудовании для захвата движения или предварительном создании 3D-моделей окружения.
Использование визуальных демонстраций для обучения сложным движениям открывает возможности для создания более адаптивных роботов. Традиционные методы обучения роботов зачастую требуют ручного программирования или использования данных захвата движения, что ограничивает их способность к обобщению и работе в новых, непредсказуемых средах. Обучение на основе видео позволяет роботу извлекать информацию о динамике и кинематике движений непосредственно из визуальных данных, что снижает зависимость от предварительно запрограммированных моделей и упрощает процесс адаптации к различным условиям. Это особенно важно для гуманоидных роботов, которым необходимо выполнять широкий спектр задач в сложных и динамичных средах, требующих гибкости и способности к обучению на основе визуального восприятия.
От Восприятия к Действию: Механика MeshMimic
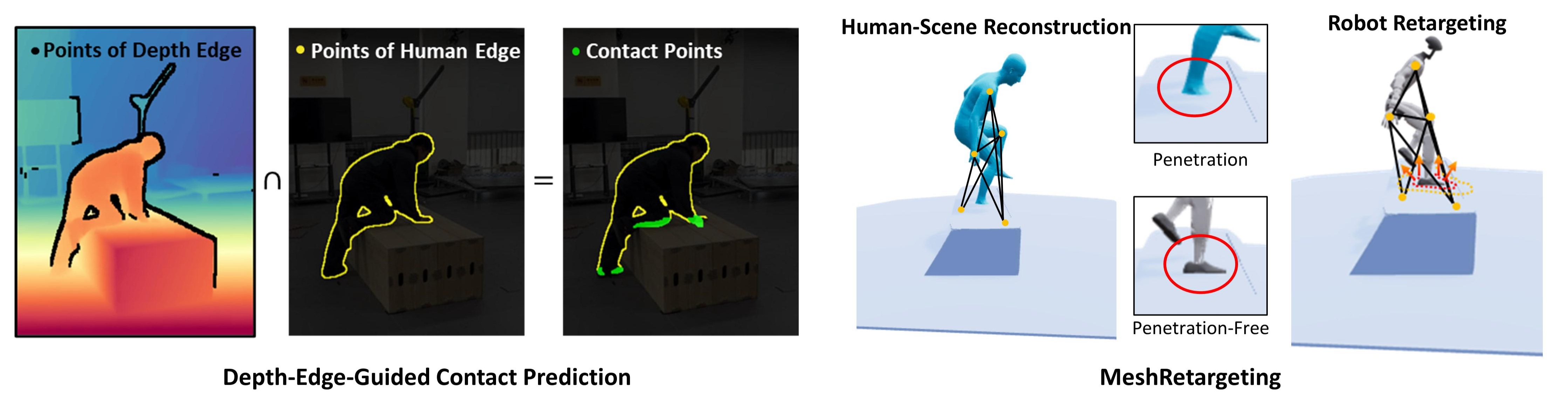
Метод MeshRetarget, используемый в MeshMimic, представляет собой подход к переназначению движений, учитывающий контактные точки взаимодействия робота с окружающей средой. В отличие от стандартных методов переназначения, которые игнорируют геометрию и ограничения робота, MeshRetarget анализирует контактные точки, чтобы обеспечить физически реалистичное и стабильное воспроизведение человеческих движений на робототехнической платформе. Это достигается путем сопоставления суставов человека с соответствующими суставами робота, учитывая ограничения, накладываемые контактами, и корректируя траекторию движения для предотвращения столкновений и обеспечения устойчивости.
Оптимизация кинематической согласованности в MeshMimic предназначена для повышения надежности траекторий движения робота путем коррекции неточностей, возникающих при визуальной оценке позы. Алгоритм использует методы оптимизации для приведения оценок позы, полученных из визуальных данных, в соответствие с физически правдоподобными ограничениями. Это достигается путем минимизации расхождений между последовательными кадрами и обеспечения кинематической связности всего движения. Применение данной оптимизации позволяет снизить влияние шума в данных визуального восприятия и гарантировать, что сгенерированные траектории соответствуют физическим возможностям робота, предотвращая нереалистичные или потенциально опасные движения.
Для точной настройки полученных политик и оптимизации производительности системы MeshMimic используется обучение с подкреплением, а именно алгоритм Asymmetric PPO (Proximal Policy Optimization). Asymmetric PPO позволяет эффективно корректировать поведение робота, минимизируя расхождения между желаемыми и фактическими движениями. В данном контексте, асимметричный подход означает использование различных функций потерь для актора и критика, что способствует более стабильному и быстрому обучению. Это позволяет MeshMimic адаптироваться к особенностям морфологии робота и улучшать точность выполнения задач, основываясь на полученных от системы визуальных данных и кинематических вычислениях.
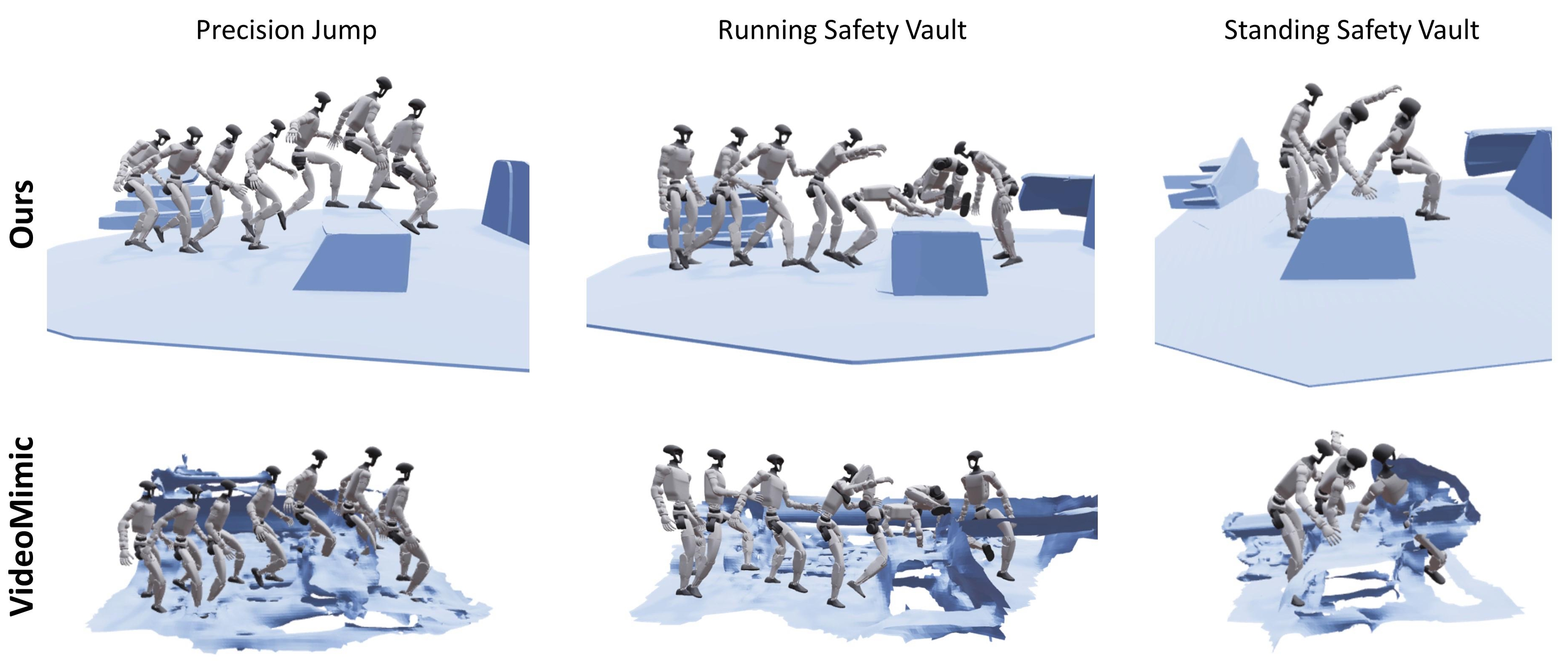
В ходе тестирования MeshMimic продемонстрировал среднюю ошибку в оценке позы (WA-MPJPE) в 94.32 единицы, что свидетельствует о значительном повышении точности по сравнению с предыдущей системой VideoMimic, у которой этот показатель составлял 112.13. Данное снижение ошибки подтверждает эффективность используемого метода контактно-ориентированного переназначения движений и оптимизации кинематической согласованности в улучшении точности воспроизведения человеческих движений роботом.
В ходе тестирования MeshMimic была достигнута средняя ошибка по всем суставам (W-MPJPE) в 518.98 единиц, что значительно ниже показателя 696.62, зафиксированного при использовании VideoMimic. Данное снижение W-MPJPE свидетельствует о повышенной точности позиционирования всех суставов робота при воспроизведении движений, что является ключевым показателем эффективности системы и её способности к точному подражанию человеческим движениям.
Процесс обучения и валидации MeshMimic полностью осуществляется в симуляционной среде IsaacLab, что позволяет значительно ускорить этапы тренировки и тестирования. Использование симуляций обеспечивает возможность проведения большого количества итераций обучения без ограничений, связанных с физическим роботом и реальным окружением. IsaacLab предоставляет инструменты для точного моделирования динамики робота и взаимодействия с окружением, что критически важно для разработки надежных и эффективных алгоритмов управления. Такой подход не только экономит время и ресурсы, но и позволяет безопасно исследовать различные сценарии и параметры, прежде чем применять обученные политики к реальному роботу.
К Надежному и Адаптивному Взаимодействию Человека и Робота
Система MeshMimic демонстрирует способность к обучению подражанию движениям с учетом особенностей рельефа, позволяя роботам ориентироваться в ранее незнакомых пространствах. В отличие от традиционных методов, полагающихся на заранее запрограммированные траектории или детальные карты местности, MeshMimic анализирует видеоданные и самостоятельно выстраивает модель окружающего мира, адаптируя свои движения к неровностям и препятствиям. Этот подход позволяет роботам не просто следовать заданной траектории, но и реагировать на изменения в окружающей среде, обеспечивая более плавное и естественное передвижение даже по сложной местности. В результате, роботы, использующие MeshMimic, способны успешно выполнять задачи в динамически меняющихся условиях, что открывает новые возможности для их применения в различных сферах, от логистики и строительства до поисково-спасательных операций.
Разработанная система демонстрирует значительно повышенную устойчивость и адаптивность по сравнению с традиционными подходами в области взаимодействия человека и робота. Вместо жестких, заранее запрограммированных движений, MeshMimic способен оперативно корректировать траекторию и поведение, реагируя на изменения в окружающей среде и непредвиденные ситуации. Это обеспечивает более плавное, естественное и интуитивно понятное взаимодействие, позволяя роботу эффективно сотрудничать с человеком в динамичных и непредсказуемых условиях. В результате, робот не просто выполняет заданные команды, а способен адаптироваться к потребностям человека и особенностям текущей ситуации, создавая ощущение настоящего партнерства и повышая общую эффективность совместной работы.
Система MeshMimic демонстрирует значительное улучшение качества трехмерной реконструкции окружающей среды. В ходе тестирования, показатель расстояния Чамфера, используемый для оценки точности восстановления геометрии сцены, составил 0.61. Это на 14% меньше, чем у предшествующей системы VideoMimic, где данный показатель составлял 0.75. Снижение расстояния Чамфера свидетельствует о более детальном и точном воссоздании формы объектов и ландшафта, что критически важно для обеспечения надежной навигации робота и взаимодействия с окружающим миром. Повышенная точность трехмерной реконструкции позволяет роботу лучше понимать структуру сцены и, как следствие, более эффективно планировать свои движения и избегать столкновений.
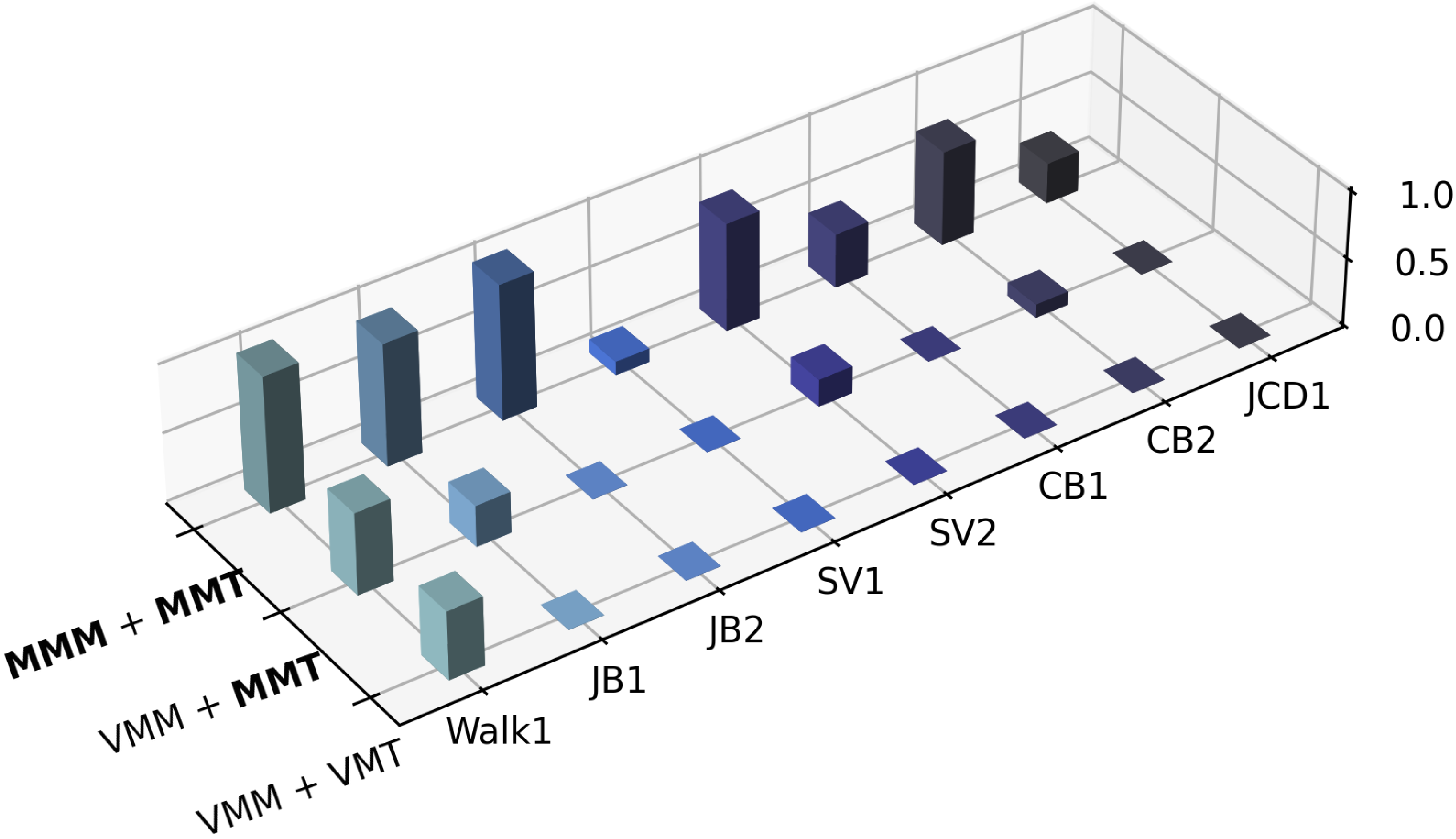
Исследования показали значительное повышение эффективности роботов в реальных условиях благодаря новой системе управления. В ходе тестирования на различных сложных задачах, включая JB2, CB1 и JCD1, наблюдалось увеличение процента успешного выполнения на 20% и даже на 30% по сравнению с базовыми показателями. Эти результаты свидетельствуют о том, что разработанная технология позволяет роботам более надежно и эффективно справляться с задачами в динамичной и непредсказуемой среде, открывая новые возможности для их применения в различных областях, от логистики до помощи человеку.
В рамках разработки систем взаимодействия человека и робота особое внимание уделяется снижению зависимости от дорогостоящего и сложного оборудования. Система MeshMimic демонстрирует возможность обучения робота имитации движений, используя в качестве основного источника информации лишь монокулярное видео — обычную видеозапись с одной камеры. Такой подход позволяет значительно упростить и удешевить конструкцию робота, отказавшись от необходимости применения лидаров, глубинных камер и других сложных сенсоров. Это открывает возможности для широкого внедрения роботов в различные сферы, где установка и обслуживание дорогостоящего оборудования затруднительно или экономически нецелесообразно, делая взаимодействие с роботами более доступным и практичным.
Разработка MeshMimic открывает новые перспективы для внедрения робототехники в разнообразные реальные условия. Улучшенная способность роботов к адаптации и устойчивости к изменениям окружающей среды, основанная на обучении имитации движений с учетом рельефа, позволяет им действовать более безопасно и эффективно в сложных и ранее неизвестных локациях. Это выходит за рамки лабораторных условий, создавая возможность для использования роботов в таких сферах, как поисково-спасательные операции, сельское хозяйство, строительство и даже домашняя помощь, где требуется гибкость и способность к самостоятельному принятию решений в непредсказуемых ситуациях. Использование лишь одной видеокамеры в качестве входных данных существенно снижает стоимость и сложность оборудования, делая подобные технологии более доступными и масштабируемыми для широкого круга применений.
Исследование, представленное в данной работе, демонстрирует, как системы могут адаптироваться к сложным условиям окружающей среды, реконструируя трехмерное пространство и обучаясь на основе визуальных данных. Этот подход к обучению роботов, ориентированный на воссоздание не только движений, но и контекста, в котором они происходят, напоминает о неизбежном течении времени и необходимости адаптации. Кен Томпсон однажды заметил: «Все системы стареют — вопрос лишь в том, делают ли они достойно». MeshMimic, стремясь к реалистичному и устойчивому управлению роботами, показывает, что именно способность системы учиться и адаптироваться к изменяющейся среде определяет её долговечность и ценность, позволяя ей «стареть достойно» даже в сложных условиях пересеченной местности.
Куда Ведет Дорога?
Представленная работа, несомненно, расширяет границы возможностей обучения роботов-гуманоидов. Однако, воссоздание трехмерной среды и человеческих движений из монокулярного видео — это лишь первый шаг. Всякая реконструкция прошлого неизбежно содержит в себе артефакты, упрощения, и, следовательно, потенциальные ошибки, которые система будет нести как память. Следующим вызовом станет не столько точность реконструкции, сколько способность системы к адаптации к неполным или искаженным данным — к признанию, что любая модель реальности всегда лишь приближение.
Особое внимание следует уделить вопросу обобщения. Успешное выполнение задачи в смоделированной среде не гарантирует устойчивость в реальном мире, где непредсказуемость — норма. Следовательно, необходимо разрабатывать методы обучения, которые позволят роботам не просто имитировать движения, но и понимать физические принципы, лежащие в их основе. Иначе, мы получим лишь хрупкую иллюзию интеллекта, обреченную на провал при малейшем отклонении от заданных условий.
В конечном итоге, истинный прогресс заключается не в создании все более сложных алгоритмов, а в признании фундаментальных ограничений любой системы. Всякая оптимизация имеет свою цену, и любое упрощение — это компромисс с будущей надежностью. Задача исследователей — не избежать этих компромиссов, а научиться осознанно их выбирать, понимая, что время — это не просто метрика, а среда, в которой система эволюционирует и стареет.
Оригинал статьи: https://arxiv.org/pdf/2602.15733.pdf
Связаться с автором: https://www.linkedin.com/in/avetisyan/
Смотрите также:
- Oppo Find X9 Ultra ОБЗОР: большой аккумулятор, скоростная зарядка, чёткое изображение
- Российская экономика: замедление, дивиденды и ожидания снижения ставки ЦБ (02.04.2026 00:32)
- Российский рынок: Рубль, Нефть и Корпоративные Истории – Что Ждет Инвесторов? (02.04.2026 23:32)
- Неважно, на что вы фотографируете!
- Motorola Moto G34 ОБЗОР: большой аккумулятор, быстрый сенсор отпечатков, лёгкий
- Лучшие смартфоны. Что купить в апреле 2026.
- Технологии и вера: новый взгляд на инклюзивный дизайн
- Рекомендации нового поколения: объединяя визуальное и текстовое
- Что такое ISO в фотоаппарате
- Российский рынок: Резервы тают, инвестиции растут, прибыли падают: что ждет инвесторов? (02.04.2026 16:32)
2026-02-18 20:50